 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeORBBuf: A Robust Buffering Method for Collaborative Visual SLAM
Paper and Code
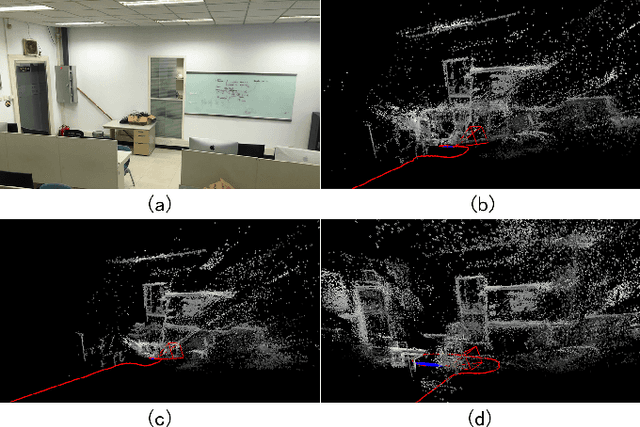
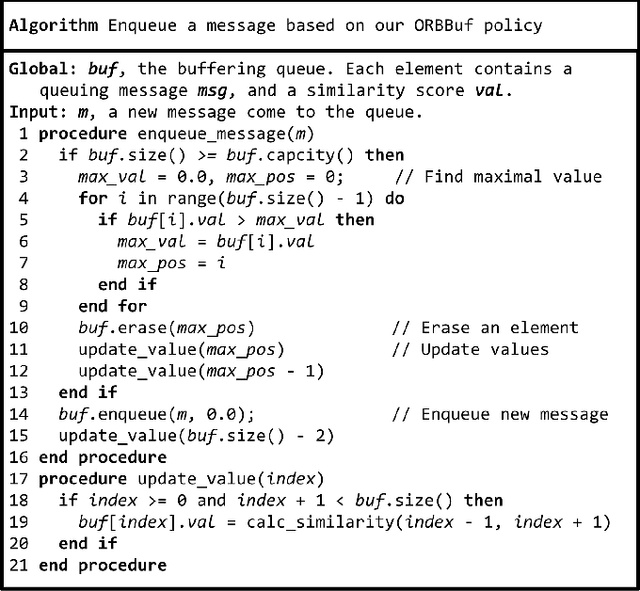
Collaborative simultaneous localization and mapping (SLAM) approaches provide a solution for autonomous robots based on embedded devices. On the other hand, visual SLAM systems rely on correlations between visual frames. As a result, the loss of visual frames from an unreliable wireless network can easily damage the results of collaborative visual SLAM systems. From our experiment, a loss of less than 1 second of data can lead to the failure of visual SLAM algorithms. We present a novel buffering method, ORBBuf, to reduce the impact of data loss on collaborative visual SLAM systems. We model the buffering problem into an optimization problem. We use an efficient greedy-like algorithm, and our buffering method drops the frame that results in the least loss to the quality of the SLAM results. We implement our ORBBuf method on ROS, a widely used middleware framework. Through an extensive evaluation on real-world scenarios and tens of gigabytes of datasets, we demonstrate that our ORBBuf method can be applied to different algorithms, different sensor data (both monocular images and stereo images), different scenes (both indoor and outdoor), and different network environments (both WiFi networks and 4G networks). Experimental results show that the network interruptions indeed affect the SLAM results, and our ORBBuf method can reduce the RMSE up to 50 times.