 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentifying and Transferring Reasoning-Critical Neurons: Improving LLM Inference Reliability via Activation Steering
Jan 27, 2026Despite the strong reasoning capabilities of recent large language models (LLMs), achieving reliable performance on challenging tasks often requires post-training or computationally expensive sampling strategies, limiting their practical efficiency. In this work, we first show that a small subset of neurons in LLMs exhibits strong predictive correlations with reasoning correctness. Based on this observation, we propose AdaRAS (Adaptive Reasoning Activation Steering), a lightweight test-time framework that improves reasoning reliability by selectively intervening on neuron activations. AdaRAS identifies Reasoning-Critical Neurons (RCNs) via a polarity-aware mean-difference criterion and adaptively steers their activations during inference, enhancing incorrect reasoning traces while avoiding degradation on already-correct cases. Experiments on 10 mathematics and coding benchmarks demonstrate consistent improvements, including over 13% gains on AIME-24 and AIME-25. Moreover, AdaRAS exhibits strong transferability across datasets and scalability to stronger models, outperforming post-training methods without additional training or sampling cost.
Spectral Characterization and Mitigation of Sequential Knowledge Editing Collapse
Jan 16, 2026Sequential knowledge editing in large language models often causes catastrophic collapse of the model's general abilities, especially for parameter-modifying methods. Existing approaches mitigate this issue through heuristic constraints on parameter updates, yet the mechanisms underlying such degradation remain insufficiently understood. In this work, we present a spectral analysis of sequential knowledge editing and show that a model's general abilities are closely associated with dominant singular directions of pretrained weight matrices. These directions are highly sensitive to perturbations and are progressively disrupted by repeated edits, closely tracking the collapse in both editing efficacy and general performance. Building on this insight, we propose REVIVE, a plug-and-play framework that stabilizes sequential editing by explicitly preserving the dominant singular subspace. REVIVE represents parameter updates in the spectral basis of the original weights and filters components that would interfere with the protected region. Extensive experiments across multiple models and benchmarks show that REVIVE consistently improves editing efficacy while substantially preserving general abilities under long-horizon sequential editing, including extreme settings with up to 20,000 edits.
Reinforced Efficient Reasoning via Semantically Diverse Exploration
Jan 08, 2026Reinforcement learning with verifiable rewards (RLVR) has proven effective in enhancing the reasoning of large language models (LLMs). Monte Carlo Tree Search (MCTS)-based extensions improve upon vanilla RLVR (e.g., GRPO) by providing tree-based reasoning rollouts that enable fine-grained and segment-level credit assignment. However, existing methods still suffer from limited exploration diversity and inefficient reasoning. To address the above challenges, we propose reinforced efficient reasoning via semantically diverse explorations, i.e., ROSE, for LLMs. To encourage more diverse reasoning exploration, our method incorporates a semantic-entropy-based branching strategy and an $\varepsilon$-exploration mechanism. The former operates on already sampled reasoning rollouts to capture semantic uncertainty and select branching points with high semantic divergence to generate new successive reasoning paths, whereas the latter stochastically initiates reasoning rollouts from the root, preventing the search process from becoming overly local. To improve efficiency, we design a length-aware segment-level advantage estimator that rewards concise and correct reasoning while penalizing unnecessarily long reasoning chains. Extensive experiments on various mathematical reasoning benchmarks with Qwen and Llama models validate the effectiveness and efficiency of ROSE. Codes are available at https://github.com/ZiqiZhao1/ROSE-rl.
DiffuGR: Generative Document Retrieval with Diffusion Language Models
Nov 19, 2025Generative retrieval (GR) re-frames document retrieval as a sequence-based document identifier (DocID) generation task, memorizing documents with model parameters and enabling end-to-end retrieval without explicit indexing. Existing GR methods are based on auto-regressive generative models, i.e., the token generation is performed from left to right. However, such auto-regressive methods suffer from: (1) mismatch between DocID generation and natural language generation, e.g., an incorrect DocID token generated in early left steps would lead to totally erroneous retrieval; and (2) failure to balance the trade-off between retrieval efficiency and accuracy dynamically, which is crucial for practical applications. To address these limitations, we propose generative document retrieval with diffusion language models, dubbed DiffuGR. It models DocID generation as a discrete diffusion process: during training, DocIDs are corrupted through a stochastic masking process, and a diffusion language model is learned to recover them under a retrieval-aware objective. For inference, DiffuGR attempts to generate DocID tokens in parallel and refines them through a controllable number of denoising steps. In contrast to conventional left-to-right auto-regressive decoding, DiffuGR provides a novel mechanism to first generate more confident DocID tokens and refine the generation through diffusion-based denoising. Moreover, DiffuGR also offers explicit runtime control over the qualitylatency tradeoff. Extensive experiments on benchmark retrieval datasets show that DiffuGR is competitive with strong auto-regressive generative retrievers, while offering flexible speed and accuracy tradeoffs through variable denoising budgets. Overall, our results indicate that non-autoregressive diffusion models are a practical and effective alternative for generative document retrieval.
Bridging the Capability Gap: Joint Alignment Tuning for Harmonizing LLM-based Multi-Agent Systems
Sep 11, 2025The advancement of large language models (LLMs) has enabled the construction of multi-agent systems to solve complex tasks by dividing responsibilities among specialized agents, such as a planning agent for subgoal generation and a grounding agent for executing tool-use actions. Most existing methods typically fine-tune these agents independently, leading to capability gaps among them with poor coordination. To address this, we propose MOAT, a Multi-Agent Joint Alignment Tuning framework that improves agents collaboration through iterative alignment. MOAT alternates between two key stages: (1) Planning Agent Alignment, which optimizes the planning agent to generate subgoal sequences that better guide the grounding agent; and (2) Grounding Agent Improving, which fine-tunes the grounding agent using diverse subgoal-action pairs generated by the agent itself to enhance its generalization capablity. Theoretical analysis proves that MOAT ensures a non-decreasing and progressively convergent training process. Experiments across six benchmarks demonstrate that MOAT outperforms state-of-the-art baselines, achieving average improvements of 3.1% on held-in tasks and 4.4% on held-out tasks.
Disentangling Knowledge Representations for Large Language Model Editing
May 24, 2025Knowledge Editing has emerged as a promising solution for efficiently updating embedded knowledge in large language models (LLMs). While existing approaches demonstrate effectiveness in integrating new knowledge and preserving the original capabilities of LLMs, they fail to maintain fine-grained irrelevant knowledge facts that share the same subject as edited knowledge but differ in relation and object. This challenge arises because subject representations inherently encode multiple attributes, causing the target and fine-grained irrelevant knowledge to become entangled in the representation space, and thus vulnerable to unintended alterations during editing. To address this, we propose DiKE, a novel approach that Disentangles Knowledge representations for LLM Editing (DiKE). DiKE consists of two key components: a Knowledge Representation Disentanglement (KRD) module that decomposes the subject representation into target-knowledgerelated and -unrelated components, and a Disentanglement-based Knowledge Edit (DKE) module that updates only the target-related component while explicitly preserving the unrelated one. We further derive a closed-form, rank-one parameter update based on matrix theory to enable efficient and minimally invasive edits. To rigorously evaluate fine-grained irrelevant knowledge preservation, we construct FINE-KED, a new benchmark comprising fine-grained irrelevant knowledge at different levels of relational similarity to the edited knowledge. Extensive experiments across multiple LLMs demonstrate that DiKE substantially improves fine-grained irrelevant knowledge preservation while maintaining competitive general editing performance.
Joint Flashback Adaptation for Forgetting-Resistant Instruction Tuning
May 21, 2025Large language models have achieved remarkable success in various tasks. However, it is challenging for them to learn new tasks incrementally due to catastrophic forgetting. Existing approaches rely on experience replay, optimization constraints, or task differentiation, which encounter strict limitations in real-world scenarios. To address these issues, we propose Joint Flashback Adaptation. We first introduce flashbacks -- a limited number of prompts from old tasks -- when adapting to new tasks and constrain the deviations of the model outputs compared to the original one. We then interpolate latent tasks between flashbacks and new tasks to enable jointly learning relevant latent tasks, new tasks, and flashbacks, alleviating data sparsity in flashbacks and facilitating knowledge sharing for smooth adaptation. Our method requires only a limited number of flashbacks without access to the replay data and is task-agnostic. We conduct extensive experiments on state-of-the-art large language models across 1000+ instruction-following tasks, arithmetic reasoning tasks, and general reasoning tasks. The results demonstrate the superior performance of our method in improving generalization on new tasks and reducing forgetting in old tasks.
Replication and Exploration of Generative Retrieval over Dynamic Corpora
Apr 24, 2025Generative retrieval (GR) has emerged as a promising paradigm in information retrieval (IR). However, most existing GR models are developed and evaluated using a static document collection, and their performance in dynamic corpora where document collections evolve continuously is rarely studied. In this paper, we first reproduce and systematically evaluate various representative GR approaches over dynamic corpora. Through extensive experiments, we reveal that existing GR models with \textit{text-based} docids show superior generalization to unseen documents. We observe that the more fine-grained the docid design in the GR model, the better its performance over dynamic corpora, surpassing BM25 and even being comparable to dense retrieval methods. While GR models with \textit{numeric-based} docids show high efficiency, their performance drops significantly over dynamic corpora. Furthermore, our experiments find that the underperformance of numeric-based docids is partly due to their excessive tendency toward the initial document set, which likely results from overfitting on the training set. We then conduct an in-depth analysis of the best-performing GR methods. We identify three critical advantages of text-based docids in dynamic corpora: (i) Semantic alignment with language models' pretrained knowledge, (ii) Fine-grained docid design, and (iii) High lexical diversity. Building on these insights, we finally propose a novel multi-docid design that leverages both the efficiency of numeric-based docids and the effectiveness of text-based docids, achieving improved performance in dynamic corpus without requiring additional retraining. Our work offers empirical evidence for advancing GR methods over dynamic corpora and paves the way for developing more generalized yet efficient GR models in real-world search engines.
Improving Sequential Recommenders through Counterfactual Augmentation of System Exposure
Apr 18, 2025In sequential recommendation (SR), system exposure refers to items that are exposed to the user. Typically, only a few of the exposed items would be interacted with by the user. Although SR has achieved great success in predicting future user interests, existing SR methods still fail to fully exploit system exposure data. Most methods only model items that have been interacted with, while the large volume of exposed but non-interacted items is overlooked. Even methods that consider the whole system exposure typically train the recommender using only the logged historical system exposure, without exploring unseen user interests. In this paper, we propose counterfactual augmentation over system exposure for sequential recommendation (CaseRec). To better model historical system exposure, CaseRec introduces reinforcement learning to account for different exposure rewards. CaseRec uses a decision transformer-based sequential model to take an exposure sequence as input and assigns different rewards according to the user feedback. To further explore unseen user interests, CaseRec proposes to perform counterfactual augmentation, where exposed original items are replaced with counterfactual items. Then, a transformer-based user simulator is proposed to predict the user feedback reward for the augmented items. Augmentation, together with the user simulator, constructs counterfactual exposure sequences to uncover new user interests. Finally, CaseRec jointly uses the logged exposure sequences with the counterfactual exposure sequences to train a decision transformer-based sequential model for generating recommendation. Experiments on three real-world benchmarks show the effectiveness of CaseRec. Our code is available at https://github.com/ZiqiZhao1/CaseRec.
Constrained Auto-Regressive Decoding Constrains Generative Retrieval
Apr 14, 2025
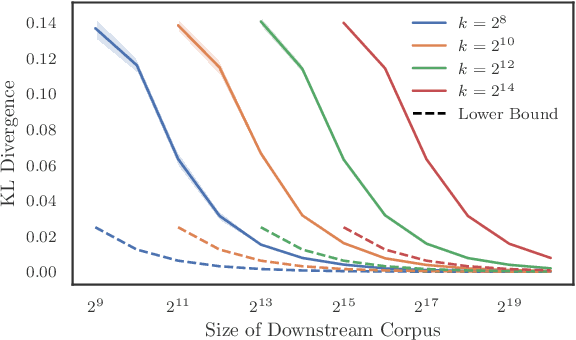
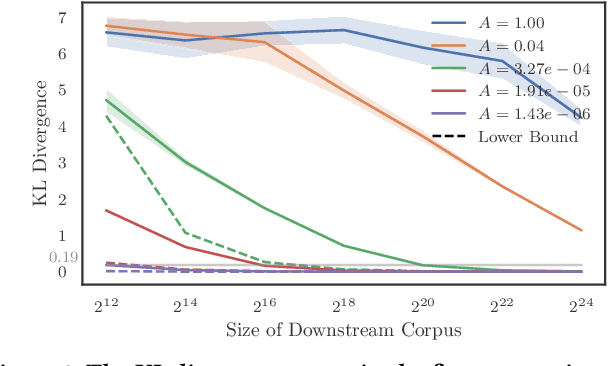
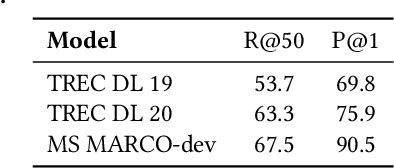
Generative retrieval seeks to replace traditional search index data structures with a single large-scale neural network, offering the potential for improved efficiency and seamless integration with generative large language models. As an end-to-end paradigm, generative retrieval adopts a learned differentiable search index to conduct retrieval by directly generating document identifiers through corpus-specific constrained decoding. The generalization capabilities of generative retrieval on out-of-distribution corpora have gathered significant attention. In this paper, we examine the inherent limitations of constrained auto-regressive generation from two essential perspectives: constraints and beam search. We begin with the Bayes-optimal setting where the generative retrieval model exactly captures the underlying relevance distribution of all possible documents. Then we apply the model to specific corpora by simply adding corpus-specific constraints. Our main findings are two-fold: (i) For the effect of constraints, we derive a lower bound of the error, in terms of the KL divergence between the ground-truth and the model-predicted step-wise marginal distributions. (ii) For the beam search algorithm used during generation, we reveal that the usage of marginal distributions may not be an ideal approach. This paper aims to improve our theoretical understanding of the generalization capabilities of the auto-regressive decoding retrieval paradigm, laying a foundation for its limitations and inspiring future advancements toward more robust and generalizable generative retrieval.