 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolygMap: A Perceptive Locomotion Framework for Humanoid Robot Stair Climbing
Oct 14, 2025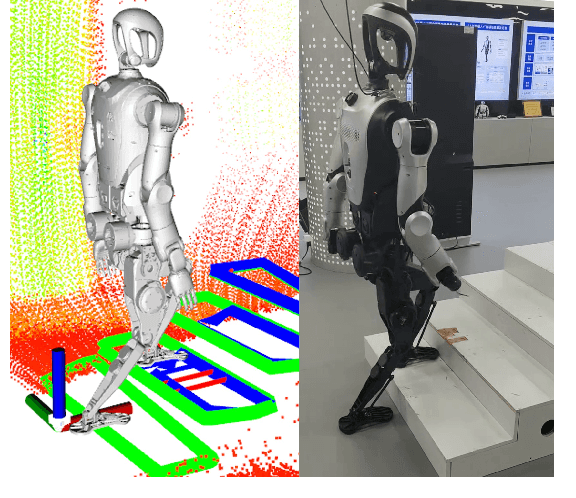
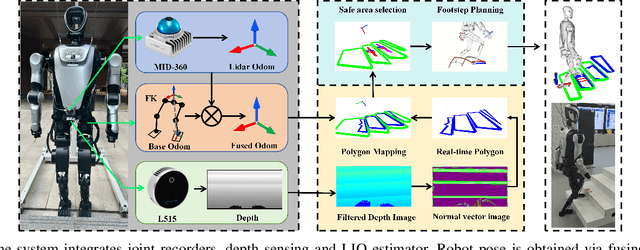
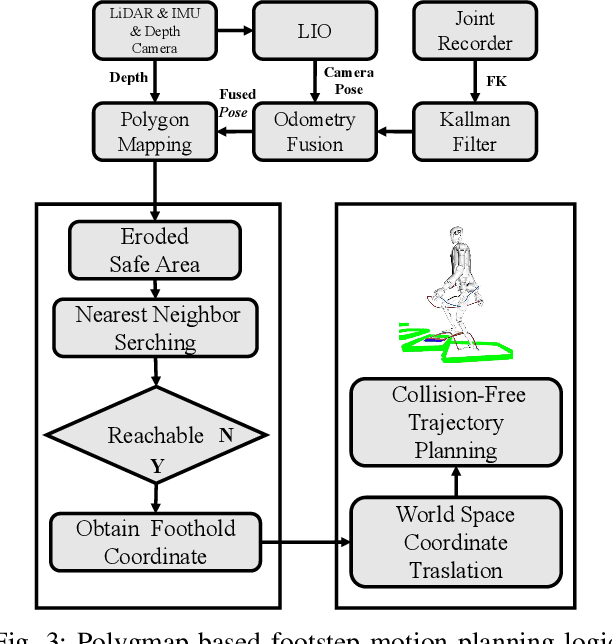
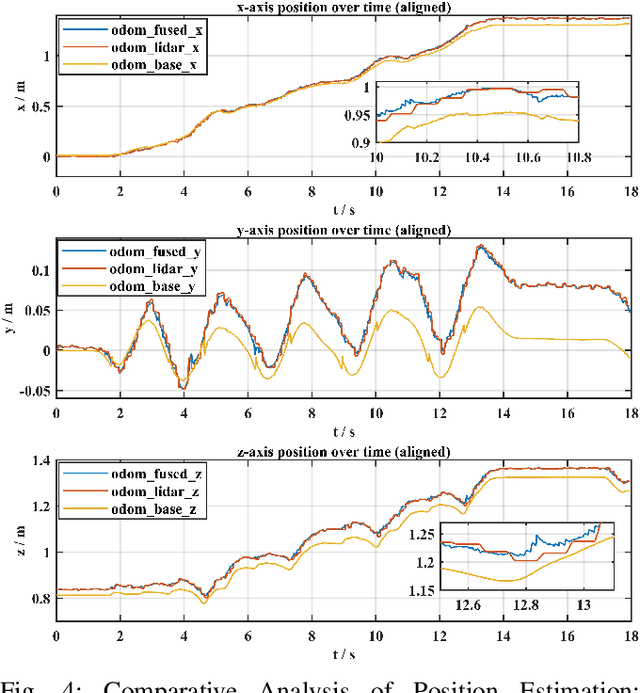
Recently, biped robot walking technology has been significantly developed, mainly in the context of a bland walking scheme. To emulate human walking, robots need to step on the positions they see in unknown spaces accurately. In this paper, we present PolyMap, a perception-based locomotion planning framework for humanoid robots to climb stairs. Our core idea is to build a real-time polygonal staircase plane semantic map, followed by a footstep planar using these polygonal plane segments. These plane segmentation and visual odometry are done by multi-sensor fusion(LiDAR, RGB-D camera and IMUs). The proposed framework is deployed on a NVIDIA Orin, which performs 20-30 Hz whole-body motion planning output. Both indoor and outdoor real-scene experiments indicate that our method is efficient and robust for humanoid robot stair climbing.
PR2: A Physics- and Photo-realistic Testbed for Embodied AI and Humanoid Robots
Sep 03, 2024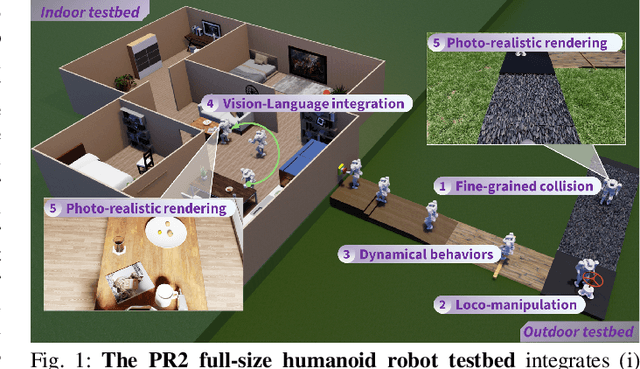

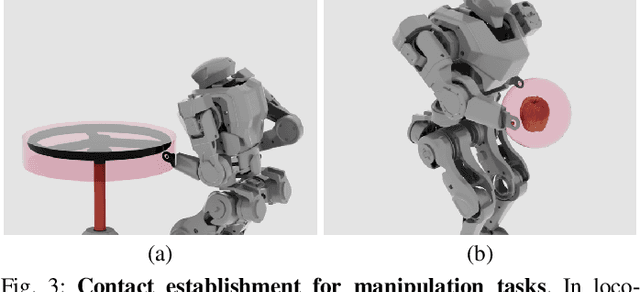

This paper presents the development of a Physics-realistic and Photo-\underline{r}ealistic humanoid robot testbed, PR2, to facilitate collaborative research between Embodied Artificial Intelligence (Embodied AI) and robotics. PR2 offers high-quality scene rendering and robot dynamic simulation, enabling (i) the creation of diverse scenes using various digital assets, (ii) the integration of advanced perception or foundation models, and (iii) the implementation of planning and control algorithms for dynamic humanoid robot behaviors based on environmental feedback. The beta version of PR2 has been deployed for the simulation track of a nationwide full-size humanoid robot competition for college students, attracting 137 teams and over 400 participants within four months. This competition covered traditional tasks in bipedal walking, as well as novel challenges in loco-manipulation and language-instruction-based object search, marking a first for public college robotics competitions. A retrospective analysis of the competition suggests that future events should emphasize the integration of locomotion with manipulation and perception. By making the PR2 testbed publicly available at https://github.com/pr2-humanoid/PR2-Platform, we aim to further advance education and training in humanoid robotics.
EndoUIC: Promptable Diffusion Transformer for Unified Illumination Correction in Capsule Endoscopy
Jun 19, 2024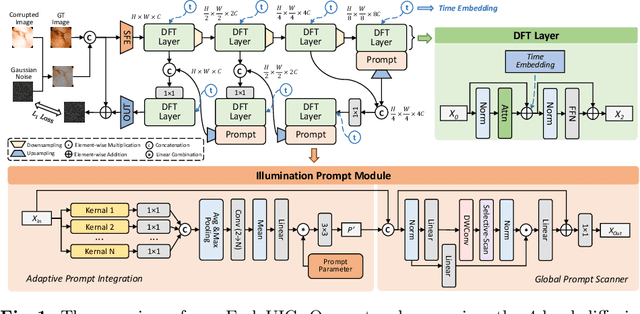



Wireless Capsule Endoscopy (WCE) is highly valued for its non-invasive and painless approach, though its effectiveness is compromised by uneven illumination from hardware constraints and complex internal dynamics, leading to overexposed or underexposed images. While researchers have discussed the challenges of low-light enhancement in WCE, the issue of correcting for different exposure levels remains underexplored. To tackle this, we introduce EndoUIC, a WCE unified illumination correction solution using an end-to-end promptable diffusion transformer (DFT) model. In our work, the illumination prompt module shall navigate the model to adapt to different exposure levels and perform targeted image enhancement, in which the Adaptive Prompt Integration (API) and Global Prompt Scanner (GPS) modules shall further boost the concurrent representation learning between the prompt parameters and features. Besides, the U-shaped restoration DFT model shall capture the long-range dependencies and contextual information for unified illumination restoration. Moreover, we present a novel Capsule-endoscopy Exposure Correction (CEC) dataset, including ground-truth and corrupted image pairs annotated by expert photographers. Extensive experiments against a variety of state-of-the-art (SOTA) methods on four datasets showcase the effectiveness of our proposed method and components in WCE illumination restoration, and the additional downstream experiments further demonstrate its utility for clinical diagnosis and surgical assistance.
CDM-MPC: An Integrated Dynamic Planning and Control Framework for Bipedal Robots Jumping
May 20, 2024



Performing acrobatic maneuvers like dynamic jumping in bipedal robots presents significant challenges in terms of actuation, motion planning, and control. Traditional approaches to these tasks often simplify dynamics to enhance computational efficiency, potentially overlooking critical factors such as the control of centroidal angular momentum (CAM) and the variability of centroidal composite rigid body inertia (CCRBI). This paper introduces a novel integrated dynamic planning and control framework, termed centroidal dynamics model-based model predictive control (CDM-MPC), designed for robust jumping control that fully considers centroidal momentum and non-constant CCRBI. The framework comprises an optimization-based kinodynamic motion planner and an MPC controller for real-time trajectory tracking and replanning. Additionally, a centroidal momentum-based inverse kinematics (IK) solver and a landing heuristic controller are developed to ensure stability during high-impact landings. The efficacy of the CDM-MPC framework is validated through extensive testing on the full-sized humanoid robot KUAVO in both simulations and experiments.
Compressed Interaction Graph based Framework for Multi-behavior Recommendation
Mar 04, 2023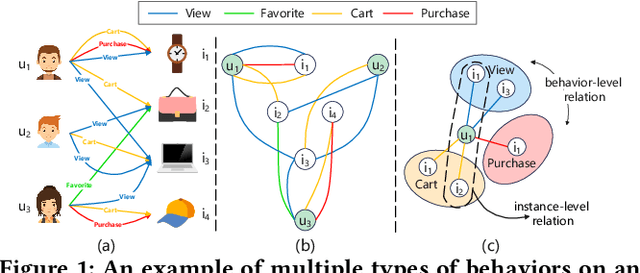

Multi-types of user behavior data (e.g., clicking, adding to cart, and purchasing) are recorded in most real-world recommendation scenarios, which can help to learn users' multi-faceted preferences. However, it is challenging to explore multi-behavior data due to the unbalanced data distribution and sparse target behavior, which lead to the inadequate modeling of high-order relations when treating multi-behavior data ''as features'' and gradient conflict in multitask learning when treating multi-behavior data ''as labels''. In this paper, we propose CIGF, a Compressed Interaction Graph based Framework, to overcome the above limitations. Specifically, we design a novel Compressed Interaction Graph Convolution Network (CIGCN) to model instance-level high-order relations explicitly. To alleviate the potential gradient conflict when treating multi-behavior data ''as labels'', we propose a Multi-Expert with Separate Input (MESI) network with separate input on the top of CIGCN for multi-task learning. Comprehensive experiments on three large-scale real-world datasets demonstrate the superiority of CIGF. Ablation studies and in-depth analysis further validate the effectiveness of our proposed model in capturing high-order relations and alleviating gradient conflict. The source code and datasets are available at https://github.com/MC-CV/CIGF.
A Survey on User Behavior Modeling in Recommender Systems
Feb 22, 2023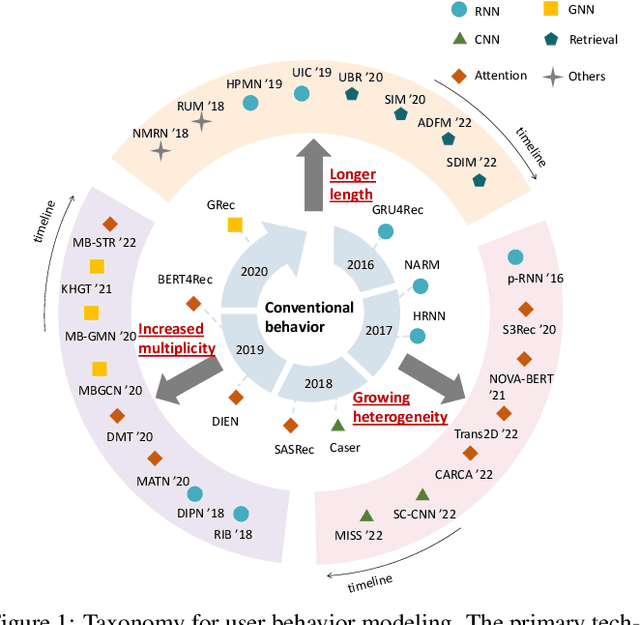
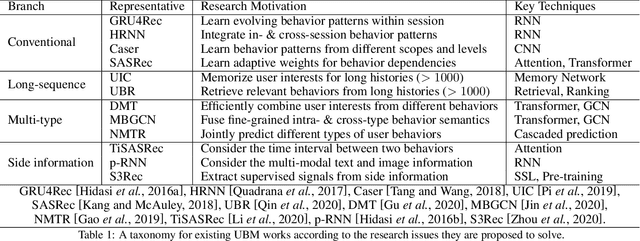
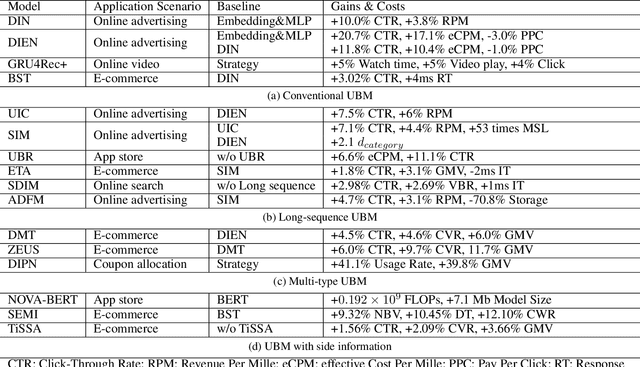
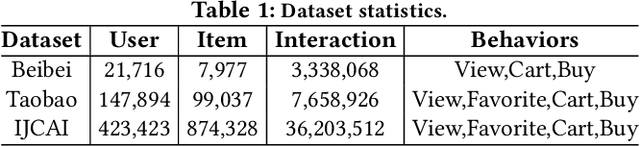
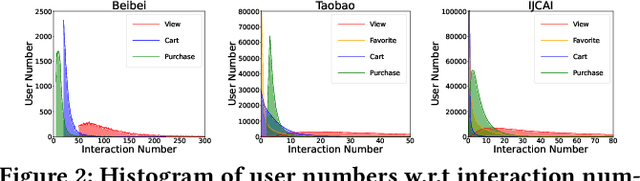
User Behavior Modeling (UBM) plays a critical role in user interest learning, which has been extensively used in recommender systems. Crucial interactive patterns between users and items have been exploited, which brings compelling improvements in many recommendation tasks. In this paper, we attempt to provide a thorough survey of this research topic. We start by reviewing the research background of UBM. Then, we provide a systematic taxonomy of existing UBM research works, which can be categorized into four different directions including Conventional UBM, Long-Sequence UBM, Multi-Type UBM, and UBM with Side Information. Within each direction, representative models and their strengths and weaknesses are comprehensively discussed. Besides, we elaborate on the industrial practices of UBM methods with the hope of providing insights into the application value of existing UBM solutions. Finally, we summarize the survey and discuss the future prospects of this field.
Disentangling Past-Future Modeling in Sequential Recommendation via Dual Networks
Oct 26, 2022



Sequential recommendation (SR) plays an important role in personalized recommender systems because it captures dynamic and diverse preferences from users' real-time increasing behaviors. Unlike the standard autoregressive training strategy, future data (also available during training) has been used to facilitate model training as it provides richer signals about user's current interests and can be used to improve the recommendation quality. However, these methods suffer from a severe training-inference gap, i.e., both past and future contexts are modeled by the same encoder when training, while only historical behaviors are available during inference. This discrepancy leads to potential performance degradation. To alleviate the training-inference gap, we propose a new framework DualRec, which achieves past-future disentanglement and past-future mutual enhancement by a novel dual network. Specifically, a dual network structure is exploited to model the past and future context separately. And a bi-directional knowledge transferring mechanism enhances the knowledge learnt by the dual network. Extensive experiments on four real-world datasets demonstrate the superiority of our approach over baseline methods. Besides, we demonstrate the compatibility of DualRec by instantiating using RNN, Transformer, and filter-MLP as backbones. Further empirical analysis verifies the high utility of modeling future contexts under our DualRec framework.
MISS: Multi-Interest Self-Supervised Learning Framework for Click-Through Rate Prediction
Nov 30, 2021


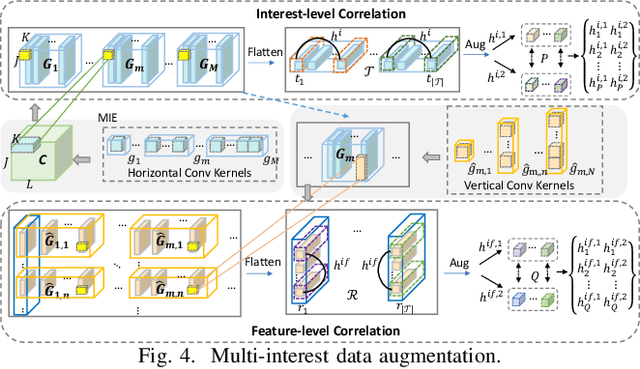
CTR prediction is essential for modern recommender systems. Ranging from early factorization machines to deep learning based models in recent years, existing CTR methods focus on capturing useful feature interactions or mining important behavior patterns. Despite the effectiveness, we argue that these methods suffer from the risk of label sparsity (i.e., the user-item interactions are highly sparse with respect to the feature space), label noise (i.e., the collected user-item interactions are usually noisy), and the underuse of domain knowledge (i.e., the pairwise correlations between samples). To address these challenging problems, we propose a novel Multi-Interest Self-Supervised learning (MISS) framework which enhances the feature embeddings with interest-level self-supervision signals. With the help of two novel CNN-based multi-interest extractors,self-supervision signals are discovered with full considerations of different interest representations (point-wise and union-wise), interest dependencies (short-range and long-range), and interest correlations (inter-item and intra-item). Based on that, contrastive learning losses are further applied to the augmented views of interest representations, which effectively improves the feature representation learning. Furthermore, our proposed MISS framework can be used as an plug-in component with existing CTR prediction models and further boost their performances. Extensive experiments on three large-scale datasets show that MISS significantly outperforms the state-of-the-art models, by up to 13.55% in AUC, and also enjoys good compatibility with representative deep CTR models.
Quality and Computation Time in Optimization Problems
Nov 20, 2021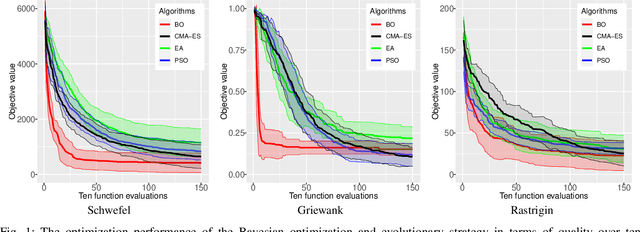
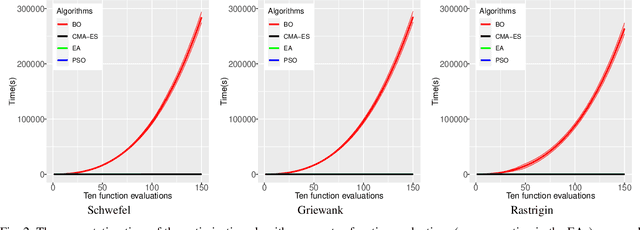
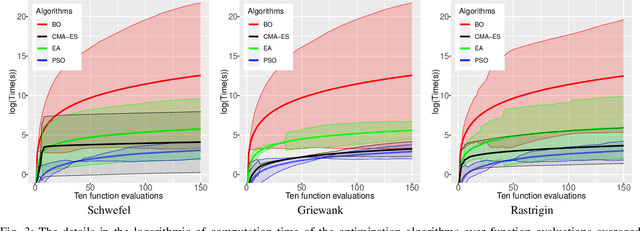

Optimization problems are crucial in artificial intelligence. Optimization algorithms are generally used to adjust the performance of artificial intelligence models to minimize the error of mapping inputs to outputs. Current evaluation methods on optimization algorithms generally consider the performance in terms of quality. However, not all optimization algorithms for all test cases are evaluated equal from quality, the computation time should be also considered for optimization tasks. In this paper, we investigate the quality and computation time of optimization algorithms in optimization problems, instead of the one-for-all evaluation of quality. We select the well-known optimization algorithms (Bayesian optimization and evolutionary algorithms) and evaluate them on the benchmark test functions in terms of quality and computation time. The results show that BO is suitable to be applied in the optimization tasks that are needed to obtain desired quality in the limited function evaluations, and the EAs are suitable to search the optimal of the tasks that are allowed to find the optimal solution with enough function evaluations. This paper provides the recommendation to select suitable optimization algorithms for optimization problems with different numbers of function evaluations, which contributes to the efficiency that obtains the desired quality with less computation time for optimization problems.