 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePR2: A Physics- and Photo-realistic Testbed for Embodied AI and Humanoid Robots
Paper and Code
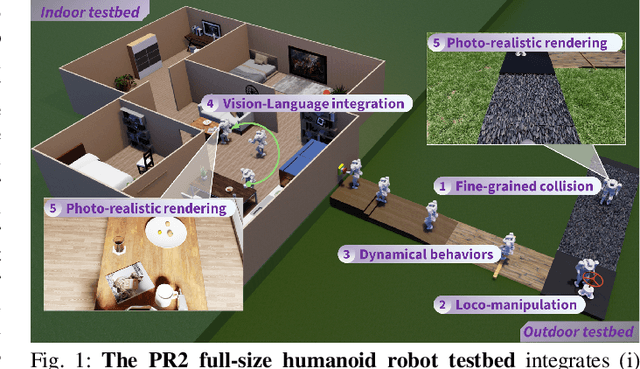


This paper presents the development of a Physics-realistic and Photo-\underline{r}ealistic humanoid robot testbed, PR2, to facilitate collaborative research between Embodied Artificial Intelligence (Embodied AI) and robotics. PR2 offers high-quality scene rendering and robot dynamic simulation, enabling (i) the creation of diverse scenes using various digital assets, (ii) the integration of advanced perception or foundation models, and (iii) the implementation of planning and control algorithms for dynamic humanoid robot behaviors based on environmental feedback. The beta version of PR2 has been deployed for the simulation track of a nationwide full-size humanoid robot competition for college students, attracting 137 teams and over 400 participants within four months. This competition covered traditional tasks in bipedal walking, as well as novel challenges in loco-manipulation and language-instruction-based object search, marking a first for public college robotics competitions. A retrospective analysis of the competition suggests that future events should emphasize the integration of locomotion with manipulation and perception. By making the PR2 testbed publicly available at https://github.com/pr2-humanoid/PR2-Platform, we aim to further advance education and training in humanoid robotics.