 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBipedal Robust Walking on Uneven Footholds: Piecewise Slope LIPM with Discrete Model Predictive Control
Apr 03, 2025This study presents an enhanced theoretical formulation for bipedal hierarchical control frameworks under uneven terrain conditions. Specifically, owing to the inherent limitations of the Linear Inverted Pendulum Model (LIPM) in handling terrain elevation variations, we develop a Piecewise Slope LIPM (PS-LIPM). This innovative model enables dynamic adjustment of the Center of Mass (CoM) height to align with topographical undulations during single-step cycles. Another contribution is proposed a generalized Angular Momentum-based LIPM (G-ALIP) for CoM velocity compensation using Centroidal Angular Momentum (CAM) regulation. Building upon these advancements, we derive the DCM step-to-step dynamics for Model Predictive Control MPC formulation, enabling simultaneous optimization of step position and step duration. A hierarchical control framework integrating MPC with a Whole-Body Controller (WBC) is implemented for bipedal locomotion across uneven stepping stones. The results validate the efficacy of the proposed hierarchical control framework and the theoretical formulation.
SymbioSim: Human-in-the-loop Simulation Platform for Bidirectional Continuing Learning in Human-Robot Interaction
Feb 11, 2025The development of intelligent robots seeks to seamlessly integrate them into the human world, providing assistance and companionship in daily life and work, with the ultimate goal of achieving human-robot symbiosis. To realize this vision, robots must continuously learn and evolve through consistent interaction and collaboration with humans, while humans need to gradually develop an understanding of and trust in robots through shared experiences. However, training and testing algorithms directly on physical robots involve substantial costs and safety risks. Moreover, current robotic simulators fail to support real human participation, limiting their ability to provide authentic interaction experiences and gather valuable human feedback. In this paper, we introduce SymbioSim, a novel human-in-the-loop robotic simulation platform designed to enable the safe and efficient development, evaluation, and optimization of human-robot interactions. By leveraging a carefully designed system architecture and modules, SymbioSim delivers a natural and realistic interaction experience, facilitating bidirectional continuous learning and adaptation for both humans and robots. Extensive experiments and user studies demonstrate the platform's promising performance and highlight its potential to significantly advance research on human-robot symbiosis.
PR2: A Physics- and Photo-realistic Testbed for Embodied AI and Humanoid Robots
Sep 03, 2024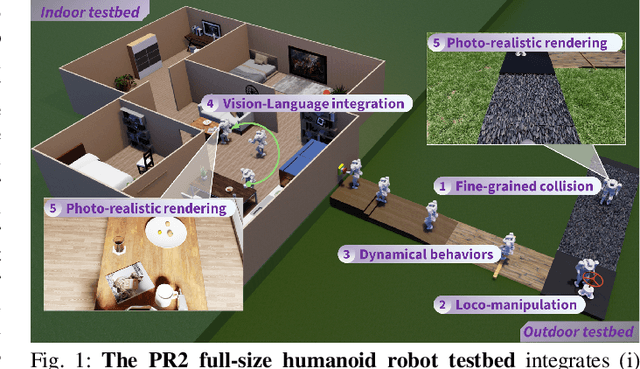


This paper presents the development of a Physics-realistic and Photo-\underline{r}ealistic humanoid robot testbed, PR2, to facilitate collaborative research between Embodied Artificial Intelligence (Embodied AI) and robotics. PR2 offers high-quality scene rendering and robot dynamic simulation, enabling (i) the creation of diverse scenes using various digital assets, (ii) the integration of advanced perception or foundation models, and (iii) the implementation of planning and control algorithms for dynamic humanoid robot behaviors based on environmental feedback. The beta version of PR2 has been deployed for the simulation track of a nationwide full-size humanoid robot competition for college students, attracting 137 teams and over 400 participants within four months. This competition covered traditional tasks in bipedal walking, as well as novel challenges in loco-manipulation and language-instruction-based object search, marking a first for public college robotics competitions. A retrospective analysis of the competition suggests that future events should emphasize the integration of locomotion with manipulation and perception. By making the PR2 testbed publicly available at https://github.com/pr2-humanoid/PR2-Platform, we aim to further advance education and training in humanoid robotics.
CDM-MPC: An Integrated Dynamic Planning and Control Framework for Bipedal Robots Jumping
May 20, 2024



Performing acrobatic maneuvers like dynamic jumping in bipedal robots presents significant challenges in terms of actuation, motion planning, and control. Traditional approaches to these tasks often simplify dynamics to enhance computational efficiency, potentially overlooking critical factors such as the control of centroidal angular momentum (CAM) and the variability of centroidal composite rigid body inertia (CCRBI). This paper introduces a novel integrated dynamic planning and control framework, termed centroidal dynamics model-based model predictive control (CDM-MPC), designed for robust jumping control that fully considers centroidal momentum and non-constant CCRBI. The framework comprises an optimization-based kinodynamic motion planner and an MPC controller for real-time trajectory tracking and replanning. Additionally, a centroidal momentum-based inverse kinematics (IK) solver and a landing heuristic controller are developed to ensure stability during high-impact landings. The efficacy of the CDM-MPC framework is validated through extensive testing on the full-sized humanoid robot KUAVO in both simulations and experiments.