 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBipedal Robust Walking on Uneven Footholds: Piecewise Slope LIPM with Discrete Model Predictive Control
Apr 03, 2025This study presents an enhanced theoretical formulation for bipedal hierarchical control frameworks under uneven terrain conditions. Specifically, owing to the inherent limitations of the Linear Inverted Pendulum Model (LIPM) in handling terrain elevation variations, we develop a Piecewise Slope LIPM (PS-LIPM). This innovative model enables dynamic adjustment of the Center of Mass (CoM) height to align with topographical undulations during single-step cycles. Another contribution is proposed a generalized Angular Momentum-based LIPM (G-ALIP) for CoM velocity compensation using Centroidal Angular Momentum (CAM) regulation. Building upon these advancements, we derive the DCM step-to-step dynamics for Model Predictive Control MPC formulation, enabling simultaneous optimization of step position and step duration. A hierarchical control framework integrating MPC with a Whole-Body Controller (WBC) is implemented for bipedal locomotion across uneven stepping stones. The results validate the efficacy of the proposed hierarchical control framework and the theoretical formulation.
HeR-DRL:Heterogeneous Relational Deep Reinforcement Learning for Decentralized Multi-Robot Crowd Navigation
Mar 15, 2024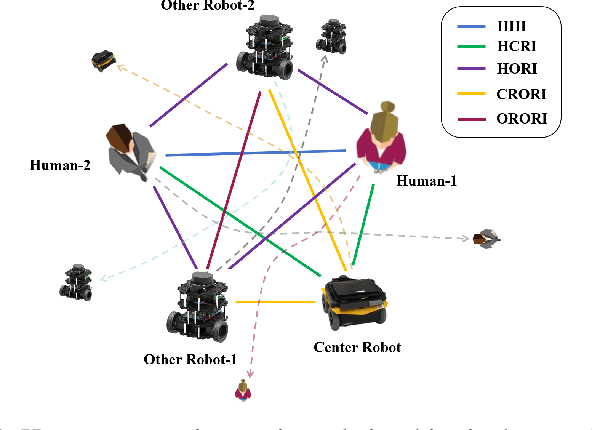
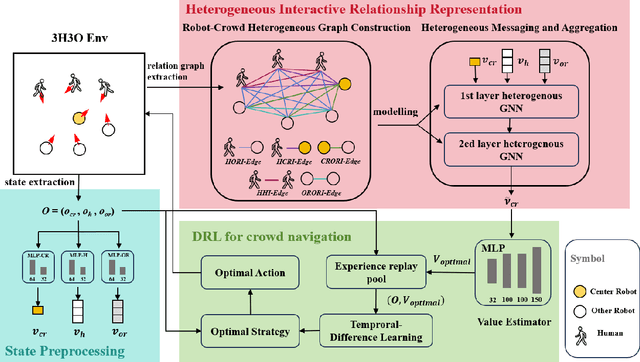
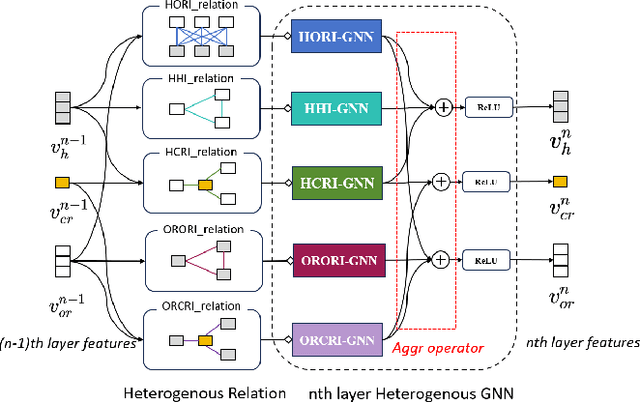
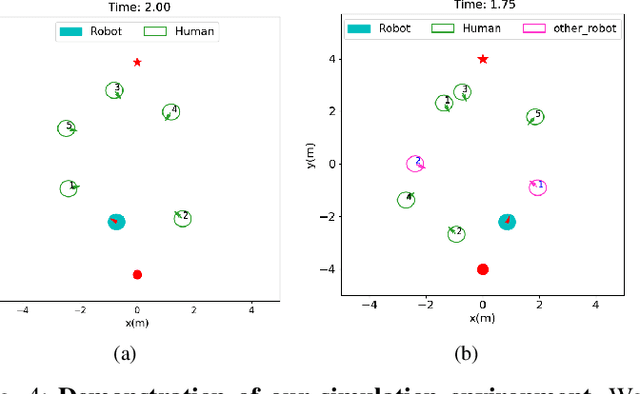
Crowd navigation has received significant research attention in recent years, especially DRL-based methods. While single-robot crowd scenarios have dominated research, they offer limited applicability to real-world complexities. The heterogeneity of interaction among multiple agent categories, like in decentralized multi-robot pedestrian scenarios, are frequently disregarded. This "interaction blind spot" hinders generalizability and restricts progress towards robust navigation algorithms. In this paper, we propose a heterogeneous relational deep reinforcement learning(HeR-DRL), based on customised heterogeneous GNN, in order to improve navigation strategies in decentralized multi-robot crowd navigation. Firstly, we devised a method for constructing robot-crowd heterogenous relation graph that effectively simulates the heterogeneous pair-wise interaction relationships. We proposed a new heterogeneous graph neural network for transferring and aggregating the heterogeneous state information. Finally, we incorporate the encoded information into deep reinforcement learning to explore the optimal policy. HeR-DRL are rigorously evaluated through comparing it to state-of-the-art algorithms in both single-robot and multi-robot circle crowssing scenario. The experimental results demonstrate that HeR-DRL surpasses the state-of-the-art approaches in overall performance, particularly excelling in safety and comfort metrics. This underscores the significance of interaction heterogeneity for crowd navigation. The source code will be publicly released in https://github.com/Zhouxy-Debugging-Den/HeR-DRL.
A novel approach for multi-agent cooperative pursuit to capture grouped evaders
Jun 27, 2020

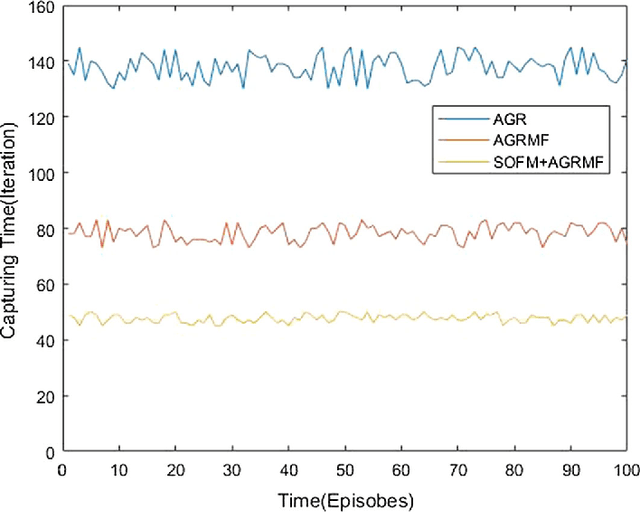
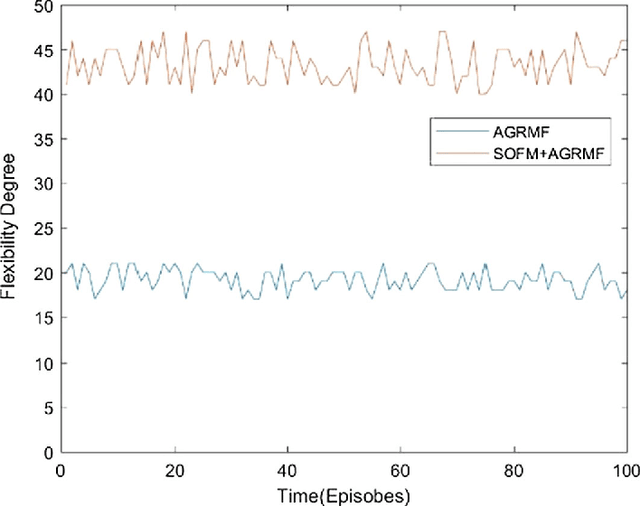
An approach of mobile multi-agent pursuit based on application of self-organizing feature map (SOFM) and along with that reinforcement learning based on agent group role membership function (AGRMF) model is proposed. This method promotes dynamic organization of the pursuers' groups and also makes pursuers' group evader according to their desire based on SOFM and AGRMF techniques. This helps to overcome the shortcomings of the pursuers that they cannot fully reorganize when the goal is too independent in process of AGRMF models operation. Besides, we also discuss a new reward function. After the formation of the group, reinforcement learning is applied to get the optimal solution for each agent. The results of each step in capturing process will finally affect the AGR membership function to speed up the convergence of the competitive neural network. The experiments result shows that this approach is more effective for the mobile agents to capture evaders.
* published paper's draft version
UniLMv2: Pseudo-Masked Language Models for Unified Language Model Pre-Training
Feb 28, 2020



We propose to pre-train a unified language model for both autoencoding and partially autoregressive language modeling tasks using a novel training procedure, referred to as a pseudo-masked language model (PMLM). Given an input text with masked tokens, we rely on conventional masks to learn inter-relations between corrupted tokens and context via autoencoding, and pseudo masks to learn intra-relations between masked spans via partially autoregressive modeling. With well-designed position embeddings and self-attention masks, the context encodings are reused to avoid redundant computation. Moreover, conventional masks used for autoencoding provide global masking information, so that all the position embeddings are accessible in partially autoregressive language modeling. In addition, the two tasks pre-train a unified language model as a bidirectional encoder and a sequence-to-sequence decoder, respectively. Our experiments show that the unified language models pre-trained using PMLM achieve new state-of-the-art results on a wide range of natural language understanding and generation tasks across several widely used benchmarks.
Neural Melody Composition from Lyrics
Sep 12, 2018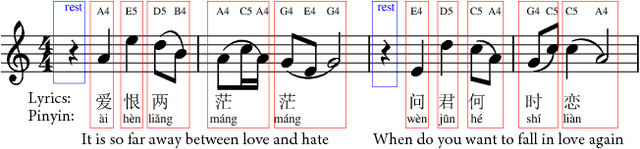
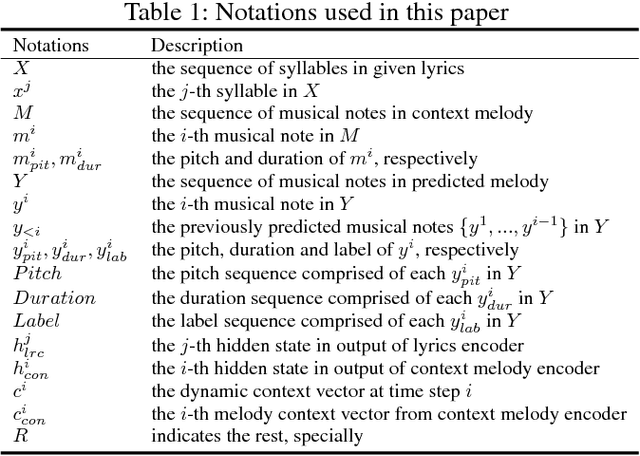
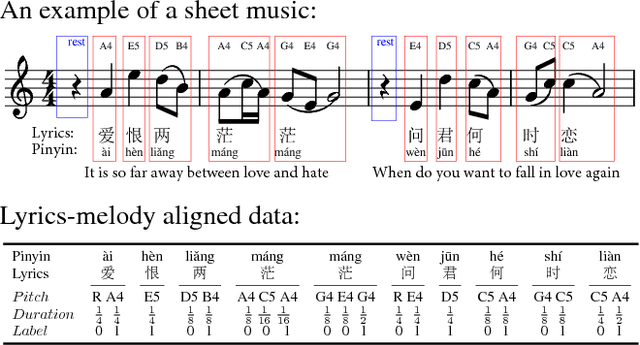

In this paper, we study a novel task that learns to compose music from natural language. Given the lyrics as input, we propose a melody composition model that generates lyrics-conditional melody as well as the exact alignment between the generated melody and the given lyrics simultaneously. More specifically, we develop the melody composition model based on the sequence-to-sequence framework. It consists of two neural encoders to encode the current lyrics and the context melody respectively, and a hierarchical decoder to jointly produce musical notes and the corresponding alignment. Experimental results on lyrics-melody pairs of 18,451 pop songs demonstrate the effectiveness of our proposed methods. In addition, we apply a singing voice synthesizer software to synthesize the "singing" of the lyrics and melodies for human evaluation. Results indicate that our generated melodies are more melodious and tuneful compared with the baseline method.
Tightly-coupled Monocular Visual-odometric SLAM using Wheels and a MEMS Gyroscope
Apr 13, 2018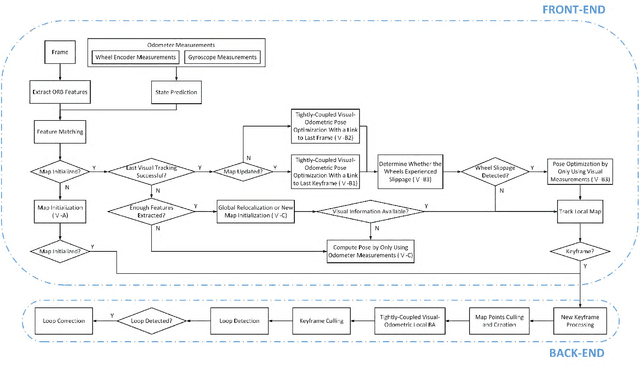
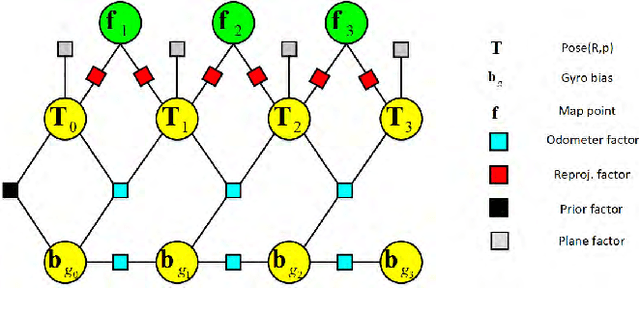

In this paper, we present a novel tightly-coupled probabilistic monocular visual-odometric Simultaneous Localization and Mapping algorithm using wheels and a MEMS gyroscope, which can provide accurate, robust and long-term localization for the ground robot moving on a plane. Firstly, we present an odometer preintegration theory that integrates the wheel encoder measurements and gyroscope measurements to a local frame. The preintegration theory properly addresses the manifold structure of the rotation group SO(3) and carefully deals with uncertainty propagation and bias correction. Then the novel odometer error term is formulated using the odometer preintegration model and it is tightly integrated into the visual optimization framework. Furthermore, we introduce a complete tracking framework to provide different strategies for motion tracking when (1) both measurements are available, (2) visual measurements are not available, and (3) wheel encoder experiences slippage, which leads the system to be accurate and robust. Finally, the proposed algorithm is evaluated by performing extensive experiments, the experimental results demonstrate the superiority of the proposed system.
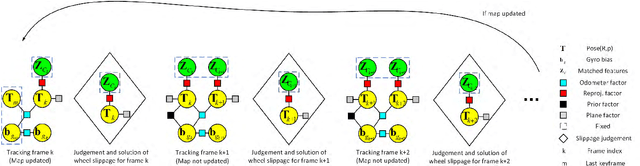
Accurate Monocular Visual-inertial SLAM using a Map-assisted EKF Approach
Mar 31, 2018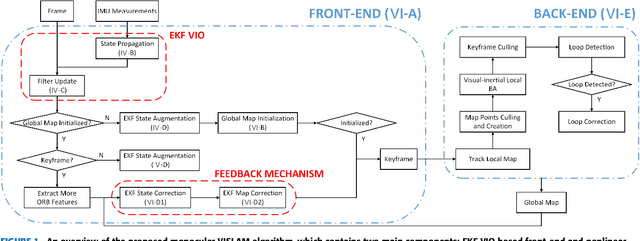
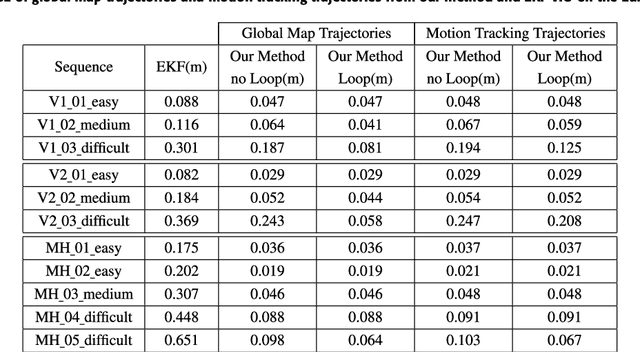
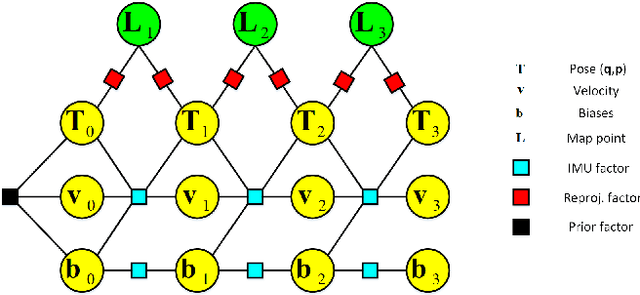
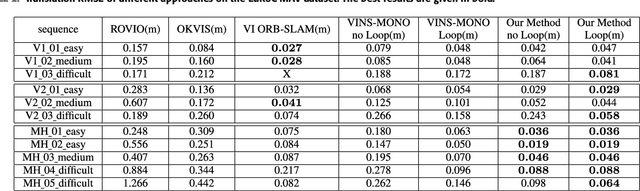
This paper presents a novel tightly-coupled monocular visual-inertial Simultaneous Localization and Mapping algorithm, which provides accurate and robust localization within the globally consistent map in real time on a standard CPU. This is achieved by firstly performing the visual-inertial extended kalman filter(EKF) to provide motion estimate at a high rate. However the filter becomes inconsistent due to the well known linearization issues. So we perform a keyframe-based visual-inertial bundle adjustment to improve the consistency and accuracy of the system. In addition, a loop closure detection and correction module is also added to eliminate the accumulated drift when revisiting an area. Finally, the optimized motion estimates and map are fed back to the EKF-based visual-inertial odometry module, thus the inconsistency and estimation error of the EKF estimator are reduced. In this way, the system can continuously provide reliable motion estimates for the long-term operation. The performance of the algorithm is validated on public datasets and real-world experiments, which proves the superiority of the proposed algorithm.
Coalition formation for Multi-agent Pursuit based on Neural Network and AGRMF Model
Jul 17, 2017
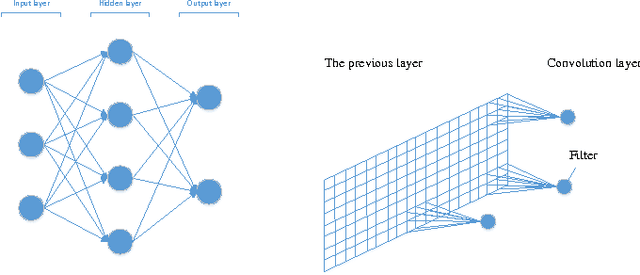
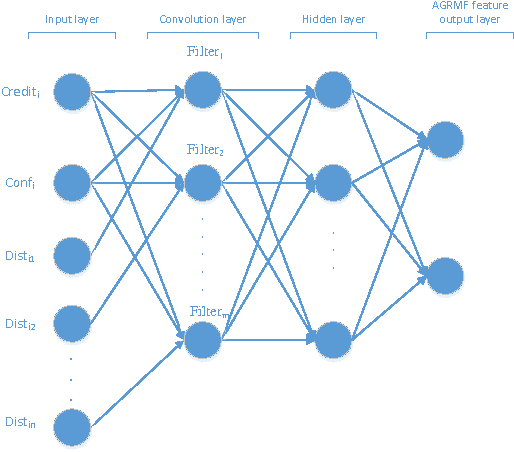
An approach for coalition formation of multi-agent pursuit based on neural network and AGRMF model is proposed.This paper constructs a novel neural work called AGRMF-ANN which consists of feature extraction part and group generation part. On one hand,The convolutional layers of feature extraction part can abstract the features of agent group role membership function(AGRMF) for all of the groups,on the other hand,those features will be fed to the group generation part based on self-organizing map(SOM) layer which is used to group the pursuers with similar features in the same group. Besides, we also come up the group attractiveness function(GAF) to evaluate the quality of groups and the pursuers contribution in order to adjust the main ability indicators of AGRMF and other weight of all neural network. The simulation experiment showed that this proposal can improve the effectiveness of coalition formation for multi-agent pursuit and ability to adopt pursuit-evasion problem with the scale of pursuer team growing.