 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive collaboration in relative observation for Multi-agent visual SLAM based on Deep Q Network
Sep 23, 2019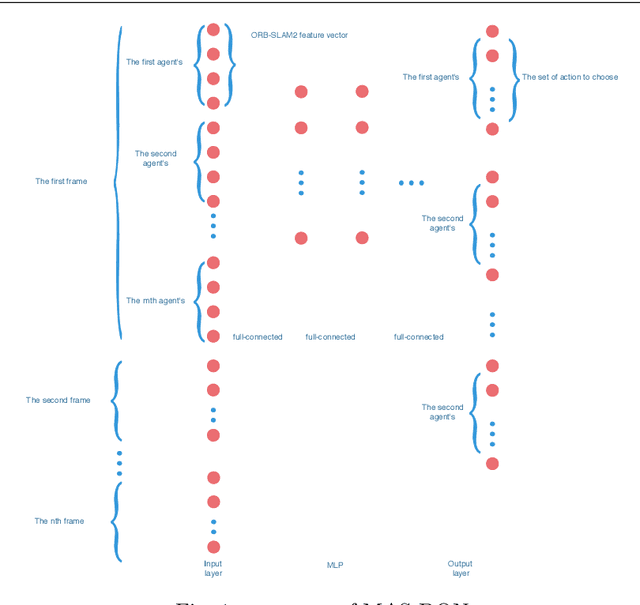

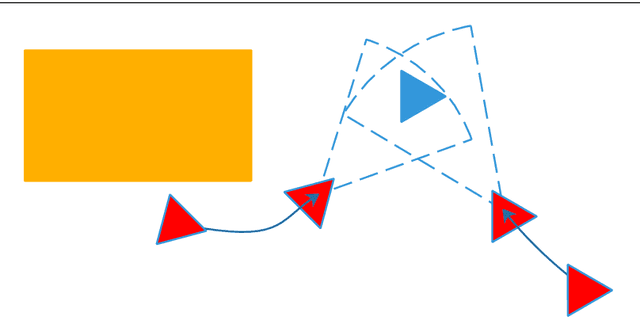
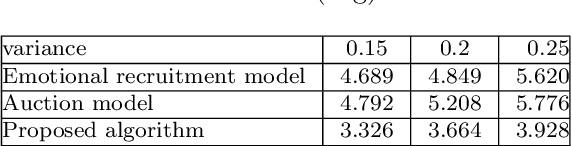
This paper proposes a unique active relative localization mechanism for multi-agent Simultaneous Localization and Mapping(SLAM),in which a agent to be observed are considered as a task, which is performed by others assisting that agent by relative observation. A task allocation algorithm based on deep reinforcement learning are proposed for this mechanism. Each agent can choose whether to localize other agents or to continue independent SLAM on it own initiative. By this way, the process of each agent SLAM will be interacted by the collaboration. Firstly, based on the characteristics of ORBSLAM, a unique observation function which models the whole MAS is obtained. Secondly, a novel type of Deep Q network(DQN) called MAS-DQN is deployed to learn correspondence between Q Value and state-action pair,abstract representation of agents in MAS are learned in the process of collaboration among agents. Finally, each agent must act with a certain degree of freedom according to MAS-DQN. The simulation results of comparative experiments prove that this mechanism improves the efficiency of cooperation in the process of multi-agent SLAM.
Coalition formation for Multi-agent Pursuit based on Neural Network and AGRMF Model
Jul 17, 2017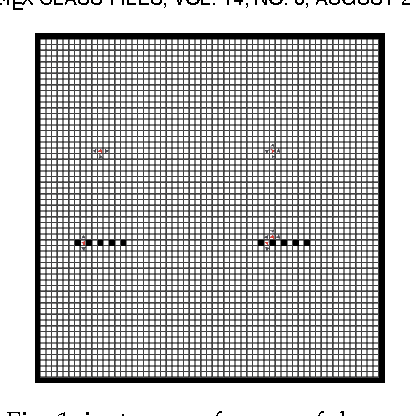
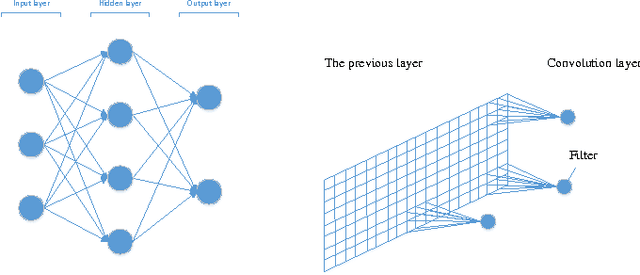
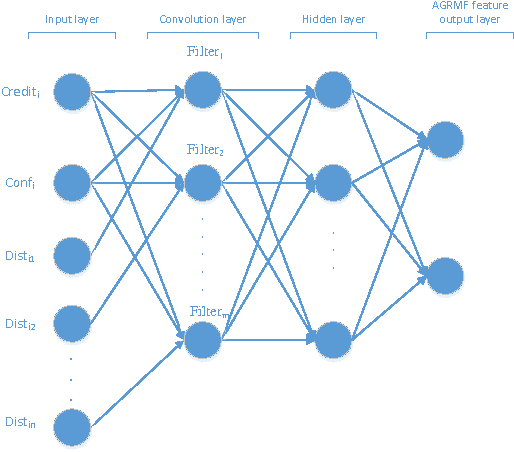
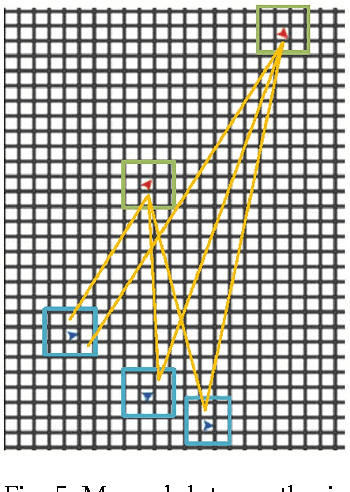
An approach for coalition formation of multi-agent pursuit based on neural network and AGRMF model is proposed.This paper constructs a novel neural work called AGRMF-ANN which consists of feature extraction part and group generation part. On one hand,The convolutional layers of feature extraction part can abstract the features of agent group role membership function(AGRMF) for all of the groups,on the other hand,those features will be fed to the group generation part based on self-organizing map(SOM) layer which is used to group the pursuers with similar features in the same group. Besides, we also come up the group attractiveness function(GAF) to evaluate the quality of groups and the pursuers contribution in order to adjust the main ability indicators of AGRMF and other weight of all neural network. The simulation experiment showed that this proposal can improve the effectiveness of coalition formation for multi-agent pursuit and ability to adopt pursuit-evasion problem with the scale of pursuer team growing.