 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Risky Samples with Conformity Constraints via Diffusion Models
Dec 21, 2025Although neural networks achieve promising performance in many tasks, they may still fail when encountering some examples and bring about risks to applications. To discover risky samples, previous literature attempts to search for patterns of risky samples within existing datasets or inject perturbation into them. Yet in this way the diversity of risky samples is limited by the coverage of existing datasets. To overcome this limitation, recent works adopt diffusion models to produce new risky samples beyond the coverage of existing datasets. However, these methods struggle in the conformity between generated samples and expected categories, which could introduce label noise and severely limit their effectiveness in applications. To address this issue, we propose RiskyDiff that incorporates the embeddings of both texts and images as implicit constraints of category conformity. We also design a conformity score to further explicitly strengthen the category conformity, as well as introduce the mechanisms of embedding screening and risky gradient guidance to boost the risk of generated samples. Extensive experiments reveal that RiskyDiff greatly outperforms existing methods in terms of the degree of risk, generation quality, and conformity with conditioned categories. We also empirically show the generalization ability of the models can be enhanced by augmenting training data with generated samples of high conformity.
DeepMesh: Auto-Regressive Artist-mesh Creation with Reinforcement Learning
Mar 19, 2025



Triangle meshes play a crucial role in 3D applications for efficient manipulation and rendering. While auto-regressive methods generate structured meshes by predicting discrete vertex tokens, they are often constrained by limited face counts and mesh incompleteness. To address these challenges, we propose DeepMesh, a framework that optimizes mesh generation through two key innovations: (1) an efficient pre-training strategy incorporating a novel tokenization algorithm, along with improvements in data curation and processing, and (2) the introduction of Reinforcement Learning (RL) into 3D mesh generation to achieve human preference alignment via Direct Preference Optimization (DPO). We design a scoring standard that combines human evaluation with 3D metrics to collect preference pairs for DPO, ensuring both visual appeal and geometric accuracy. Conditioned on point clouds and images, DeepMesh generates meshes with intricate details and precise topology, outperforming state-of-the-art methods in both precision and quality. Project page: https://zhaorw02.github.io/DeepMesh/
LLaMA-Mesh: Unifying 3D Mesh Generation with Language Models
Nov 14, 2024



This work explores expanding the capabilities of large language models (LLMs) pretrained on text to generate 3D meshes within a unified model. This offers key advantages of (1) leveraging spatial knowledge already embedded in LLMs, derived from textual sources like 3D tutorials, and (2) enabling conversational 3D generation and mesh understanding. A primary challenge is effectively tokenizing 3D mesh data into discrete tokens that LLMs can process seamlessly. To address this, we introduce LLaMA-Mesh, a novel approach that represents the vertex coordinates and face definitions of 3D meshes as plain text, allowing direct integration with LLMs without expanding the vocabulary. We construct a supervised fine-tuning (SFT) dataset enabling pretrained LLMs to (1) generate 3D meshes from text prompts, (2) produce interleaved text and 3D mesh outputs as required, and (3) understand and interpret 3D meshes. Our work is the first to demonstrate that LLMs can be fine-tuned to acquire complex spatial knowledge for 3D mesh generation in a text-based format, effectively unifying the 3D and text modalities. LLaMA-Mesh achieves mesh generation quality on par with models trained from scratch while maintaining strong text generation performance.
RDT-1B: a Diffusion Foundation Model for Bimanual Manipulation
Oct 10, 2024



Bimanual manipulation is essential in robotics, yet developing foundation models is extremely challenging due to the inherent complexity of coordinating two robot arms (leading to multi-modal action distributions) and the scarcity of training data. In this paper, we present the Robotics Diffusion Transformer (RDT), a pioneering diffusion foundation model for bimanual manipulation. RDT builds on diffusion models to effectively represent multi-modality, with innovative designs of a scalable Transformer to deal with the heterogeneity of multi-modal inputs and to capture the nonlinearity and high frequency of robotic data. To address data scarcity, we further introduce a Physically Interpretable Unified Action Space, which can unify the action representations of various robots while preserving the physical meanings of original actions, facilitating learning transferrable physical knowledge. With these designs, we managed to pre-train RDT on the largest collection of multi-robot datasets to date and scaled it up to 1.2B parameters, which is the largest diffusion-based foundation model for robotic manipulation. We finally fine-tuned RDT on a self-created multi-task bimanual dataset with over 6K+ episodes to refine its manipulation capabilities. Experiments on real robots demonstrate that RDT significantly outperforms existing methods. It exhibits zero-shot generalization to unseen objects and scenes, understands and follows language instructions, learns new skills with just 1~5 demonstrations, and effectively handles complex, dexterous tasks. We refer to https://rdt-robotics.github.io/rdt-robotics/ for the code and videos.
Real-world Adversarial Defense against Patch Attacks based on Diffusion Model
Sep 14, 2024Adversarial patches present significant challenges to the robustness of deep learning models, making the development of effective defenses become critical for real-world applications. This paper introduces DIFFender, a novel DIFfusion-based DeFender framework that leverages the power of a text-guided diffusion model to counter adversarial patch attacks. At the core of our approach is the discovery of the Adversarial Anomaly Perception (AAP) phenomenon, which enables the diffusion model to accurately detect and locate adversarial patches by analyzing distributional anomalies. DIFFender seamlessly integrates the tasks of patch localization and restoration within a unified diffusion model framework, enhancing defense efficacy through their close interaction. Additionally, DIFFender employs an efficient few-shot prompt-tuning algorithm, facilitating the adaptation of the pre-trained diffusion model to defense tasks without the need for extensive retraining. Our comprehensive evaluation, covering image classification and face recognition tasks, as well as real-world scenarios, demonstrates DIFFender's robust performance against adversarial attacks. The framework's versatility and generalizability across various settings, classifiers, and attack methodologies mark a significant advancement in adversarial patch defense strategies. Except for the popular visible domain, we have identified another advantage of DIFFender: its capability to easily expand into the infrared domain. Consequently, we demonstrate the good flexibility of DIFFender, which can defend against both infrared and visible adversarial patch attacks alternatively using a universal defense framework.
MeshAnything V2: Artist-Created Mesh Generation With Adjacent Mesh Tokenization
Aug 05, 2024

We introduce MeshAnything V2, an autoregressive transformer that generates Artist-Created Meshes (AM) aligned to given shapes. It can be integrated with various 3D asset production pipelines to achieve high-quality, highly controllable AM generation. MeshAnything V2 surpasses previous methods in both efficiency and performance using models of the same size. These improvements are due to our newly proposed mesh tokenization method: Adjacent Mesh Tokenization (AMT). Different from previous methods that represent each face with three vertices, AMT uses a single vertex whenever possible. Compared to previous methods, AMT requires about half the token sequence length to represent the same mesh in average. Furthermore, the token sequences from AMT are more compact and well-structured, fundamentally benefiting AM generation. Our extensive experiments show that AMT significantly improves the efficiency and performance of AM generation. Project Page: https://buaacyw.github.io/meshanything-v2/
Freeplane: Unlocking Free Lunch in Triplane-Based Sparse-View Reconstruction Models
Jun 02, 2024Creating 3D assets from single-view images is a complex task that demands a deep understanding of the world. Recently, feed-forward 3D generative models have made significant progress by training large reconstruction models on extensive 3D datasets, with triplanes being the preferred 3D geometry representation. However, effectively utilizing the geometric priors of triplanes, while minimizing artifacts caused by generated inconsistent multi-view images, remains a challenge. In this work, we present \textbf{Fre}quency modulat\textbf{e}d tri\textbf{plane} (\textbf{Freeplane}), a simple yet effective method to improve the generation quality of feed-forward models without additional training. We first analyze the role of triplanes in feed-forward methods and find that the inconsistent multi-view images introduce high-frequency artifacts on triplanes, leading to low-quality 3D meshes. Based on this observation, we propose strategically filtering triplane features and combining triplanes before and after filtering to produce high-quality textured meshes. These techniques incur no additional cost and can be seamlessly integrated into pre-trained feed-forward models to enhance their robustness against the inconsistency of generated multi-view images. Both qualitative and quantitative results demonstrate that our method improves the performance of feed-forward models by simply modulating triplanes. All you need is to modulate the triplanes during inference.
Vidu4D: Single Generated Video to High-Fidelity 4D Reconstruction with Dynamic Gaussian Surfels
May 27, 2024Video generative models are receiving particular attention given their ability to generate realistic and imaginative frames. Besides, these models are also observed to exhibit strong 3D consistency, significantly enhancing their potential to act as world simulators. In this work, we present Vidu4D, a novel reconstruction model that excels in accurately reconstructing 4D (i.e., sequential 3D) representations from single generated videos, addressing challenges associated with non-rigidity and frame distortion. This capability is pivotal for creating high-fidelity virtual contents that maintain both spatial and temporal coherence. At the core of Vidu4D is our proposed Dynamic Gaussian Surfels (DGS) technique. DGS optimizes time-varying warping functions to transform Gaussian surfels (surface elements) from a static state to a dynamically warped state. This transformation enables a precise depiction of motion and deformation over time. To preserve the structural integrity of surface-aligned Gaussian surfels, we design the warped-state geometric regularization based on continuous warping fields for estimating normals. Additionally, we learn refinements on rotation and scaling parameters of Gaussian surfels, which greatly alleviates texture flickering during the warping process and enhances the capture of fine-grained appearance details. Vidu4D also contains a novel initialization state that provides a proper start for the warping fields in DGS. Equipping Vidu4D with an existing video generative model, the overall framework demonstrates high-fidelity text-to-4D generation in both appearance and geometry.
MicroDreamer: Zero-shot 3D Generation in $\sim$20 Seconds by Score-based Iterative Reconstruction
Apr 30, 2024

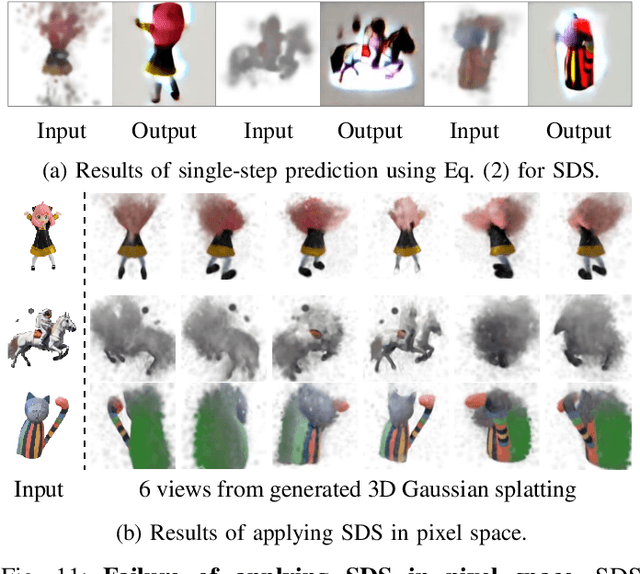

Optimization-based approaches, such as score distillation sampling (SDS), show promise in zero-shot 3D generation but suffer from low efficiency, primarily due to the high number of function evaluations (NFEs) required for each sample. In this paper, we introduce score-based iterative reconstruction (SIR), an efficient and general algorithm for 3D generation with a multi-view score-based diffusion model. Given the images produced by the diffusion model, SIR reduces NFEs by repeatedly optimizing 3D parameters, unlike the single optimization in SDS, mimicking the 3D reconstruction process. With other improvements including optimization in the pixel space, we present an efficient approach called MicroDreamer that generally applies to various 3D representations and 3D generation tasks. In particular, retaining a comparable performance, MicroDreamer is 5-20 times faster than SDS in generating neural radiance field and takes about 20 seconds to generate meshes from 3D Gaussian splitting on a single A100 GPU, halving the time of the fastest zero-shot baseline, DreamGaussian. Our code is available at https://github.com/ML-GSAI/MicroDreamer.
FlexiDreamer: Single Image-to-3D Generation with FlexiCubes
Apr 01, 20243D content generation from text prompts or single images has made remarkable progress in quality and speed recently. One of its dominant paradigms involves generating consistent multi-view images followed by a sparse-view reconstruction. However, due to the challenge of directly deforming the mesh representation to approach the target topology, most methodologies learn an implicit representation (such as NeRF) during the sparse-view reconstruction and acquire the target mesh by a post-processing extraction. Although the implicit representation can effectively model rich 3D information, its training typically entails a long convergence time. In addition, the post-extraction operation from the implicit field also leads to undesirable visual artifacts. In this paper, we propose FlexiDreamer, a novel single image-to-3d generation framework that reconstructs the target mesh in an end-to-end manner. By leveraging a flexible gradient-based extraction known as FlexiCubes, our method circumvents the defects brought by the post-processing and facilitates a direct acquisition of the target mesh. Furthermore, we incorporate a multi-resolution hash grid encoding scheme that progressively activates the encoding levels into the implicit field in FlexiCubes to help capture geometric details for per-step optimization. Notably, FlexiDreamer recovers a dense 3D structure from a single-view image in approximately 1 minute on a single NVIDIA A100 GPU, outperforming previous methodologies by a large margin.