 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring the Vulnerabilities of Federated Learning: A Deep Dive into Gradient Inversion Attacks
Mar 13, 2025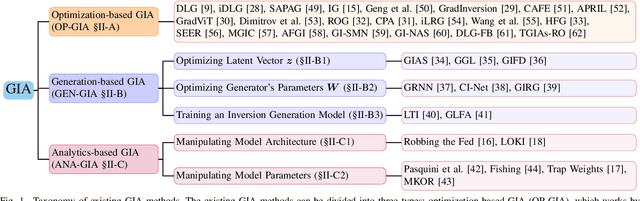
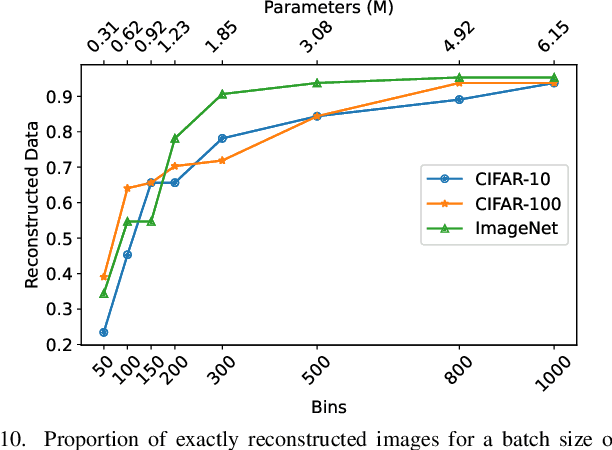
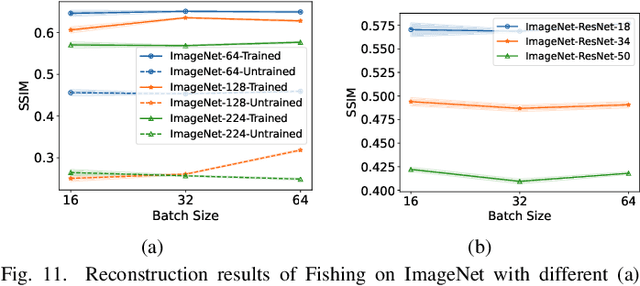
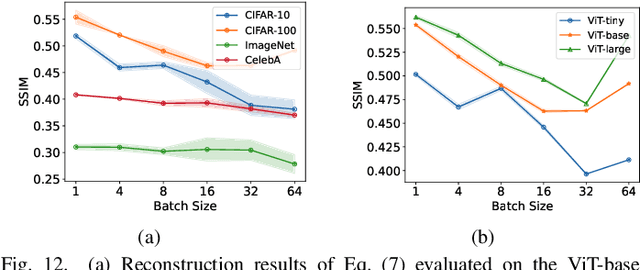
Federated Learning (FL) has emerged as a promising privacy-preserving collaborative model training paradigm without sharing raw data. However, recent studies have revealed that private information can still be leaked through shared gradient information and attacked by Gradient Inversion Attacks (GIA). While many GIA methods have been proposed, a detailed analysis, evaluation, and summary of these methods are still lacking. Although various survey papers summarize existing privacy attacks in FL, few studies have conducted extensive experiments to unveil the effectiveness of GIA and their associated limiting factors in this context. To fill this gap, we first undertake a systematic review of GIA and categorize existing methods into three types, i.e., \textit{optimization-based} GIA (OP-GIA), \textit{generation-based} GIA (GEN-GIA), and \textit{analytics-based} GIA (ANA-GIA). Then, we comprehensively analyze and evaluate the three types of GIA in FL, providing insights into the factors that influence their performance, practicality, and potential threats. Our findings indicate that OP-GIA is the most practical attack setting despite its unsatisfactory performance, while GEN-GIA has many dependencies and ANA-GIA is easily detectable, making them both impractical. Finally, we offer a three-stage defense pipeline to users when designing FL frameworks and protocols for better privacy protection and share some future research directions from the perspectives of attackers and defenders that we believe should be pursued. We hope that our study can help researchers design more robust FL frameworks to defend against these attacks.
UD-Mamba: A pixel-level uncertainty-driven Mamba model for medical image segmentation
Feb 04, 2025Recent advancements have highlighted the Mamba framework, a state-space model known for its efficiency in capturing long-range dependencies with linear computational complexity. While Mamba has shown competitive performance in medical image segmentation, it encounters difficulties in modeling local features due to the sporadic nature of traditional location-based scanning methods and the complex, ambiguous boundaries often present in medical images. To overcome these challenges, we propose Uncertainty-Driven Mamba (UD-Mamba), which redefines the pixel-order scanning process by incorporating channel uncertainty into the scanning mechanism. UD-Mamba introduces two key scanning techniques: 1) sequential scanning, which prioritizes regions with high uncertainty by scanning in a row-by-row fashion, and 2) skip scanning, which processes columns vertically, moving from high-to-low or low-to-high uncertainty at fixed intervals. Sequential scanning efficiently clusters high-uncertainty regions, such as boundaries and foreground objects, to improve segmentation precision, while skip scanning enhances the interaction between background and foreground regions, allowing for timely integration of background information to support more accurate foreground inference. Recognizing the advantages of scanning from certain to uncertain areas, we introduce four learnable parameters to balance the importance of features extracted from different scanning methods. Additionally, a cosine consistency loss is employed to mitigate the drawbacks of transitioning between uncertain and certain regions during the scanning process. Our method demonstrates robust segmentation performance, validated across three distinct medical imaging datasets involving pathology, dermatological lesions, and cardiac tasks.
Selective Aggregation for Low-Rank Adaptation in Federated Learning
Oct 02, 2024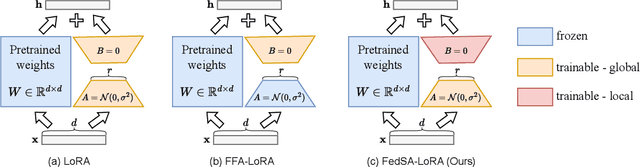
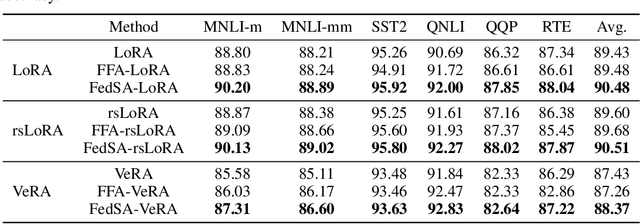
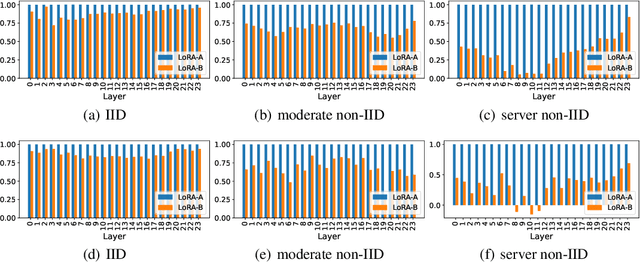
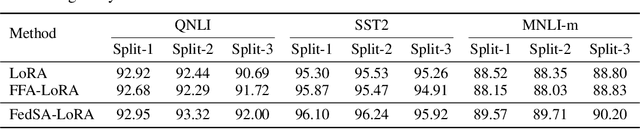
We investigate LoRA in federated learning through the lens of the asymmetry analysis of the learned $A$ and $B$ matrices. In doing so, we uncover that $A$ matrices are responsible for learning general knowledge, while $B$ matrices focus on capturing client-specific knowledge. Based on this finding, we introduce Federated Share-A Low-Rank Adaptation (FedSA-LoRA), which employs two low-rank trainable matrices $A$ and $B$ to model the weight update, but only $A$ matrices are shared with the server for aggregation. Moreover, we delve into the relationship between the learned $A$ and $B$ matrices in other LoRA variants, such as rsLoRA and VeRA, revealing a consistent pattern. Consequently, we extend our FedSA-LoRA method to these LoRA variants, resulting in FedSA-rsLoRA and FedSA-VeRA. In this way, we establish a general paradigm for integrating LoRA with FL, offering guidance for future work on subsequent LoRA variants combined with FL. Extensive experimental results on natural language understanding and generation tasks demonstrate the effectiveness of the proposed method.
Adaptive Probabilistic Planning for the Uncertain and Dynamic Orienteering Problem
Sep 09, 2024



The Orienteering Problem (OP) is a well-studied routing problem that has been extended to incorporate uncertainties, reflecting stochastic or dynamic travel costs, prize-collection costs, and prizes. Existing approaches may, however, be inefficient in real-world applications due to insufficient modeling knowledge and initially unknowable parameters in online scenarios. Thus, we propose the Uncertain and Dynamic Orienteering Problem (UDOP), modeling travel costs as distributions with unknown and time-variant parameters. UDOP also associates uncertain travel costs with dynamic prizes and prize-collection costs for its objective and budget constraints. To address UDOP, we develop an ADaptive Approach for Probabilistic paThs - ADAPT, that iteratively performs 'execution' and 'online planning' based on an initial 'offline' solution. The execution phase updates system status and records online cost observations. The online planner employs a Bayesian approach to adaptively estimate power consumption and optimize path sequence based on safety beliefs. We evaluate ADAPT in a practical Unmanned Aerial Vehicle (UAV) charging scheduling problem for Wireless Rechargeable Sensor Networks. The UAV must optimize its path to recharge sensor nodes efficiently while managing its energy under uncertain conditions. ADAPT maintains comparable solution quality and computation time while offering superior robustness. Extensive simulations show that ADAPT achieves a 100% Mission Success Rate (MSR) across all tested scenarios, outperforming comparable heuristic-based and frequentist approaches that fail up to 70% (under challenging conditions) and averaging 67% MSR, respectively. This work advances the field of OP with uncertainties, offering a reliable and efficient approach for real-world applications in uncertain and dynamic environments.
Is That Rain? Understanding Effects on Visual Odometry Performance for Autonomous UAVs and Efficient DNN-based Rain Classification at the Edge
Jul 17, 2024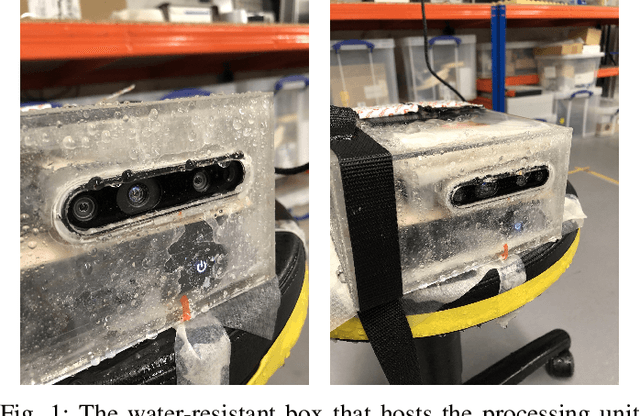
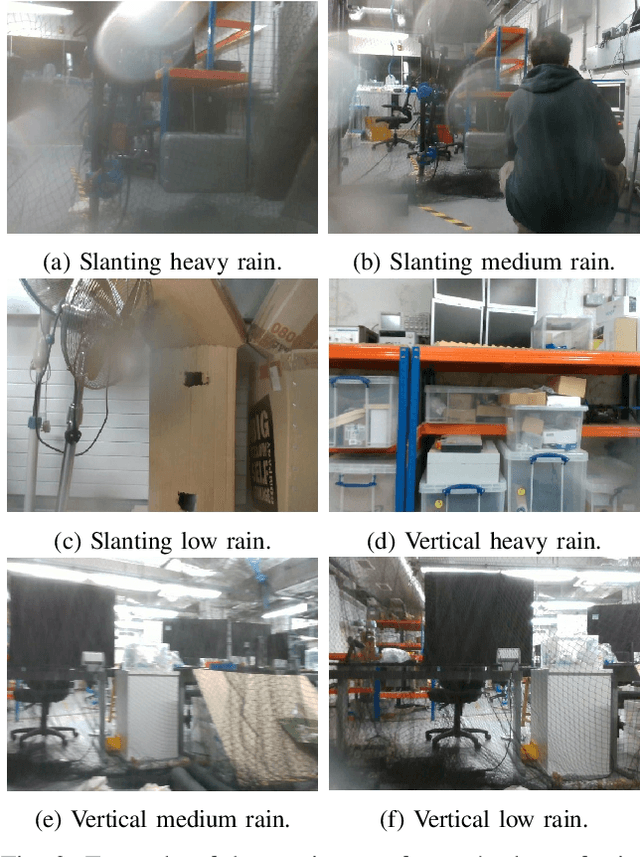
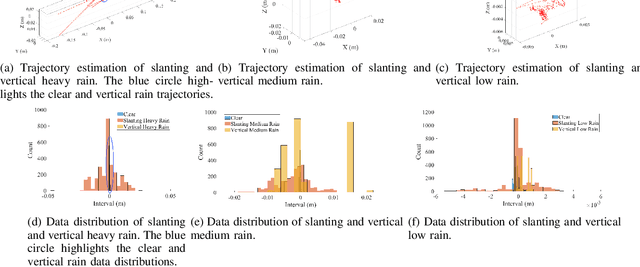

The development of safe and reliable autonomous unmanned aerial vehicles relies on the ability of the system to recognise and adapt to changes in the local environment based on sensor inputs. State-of-the-art local tracking and trajectory planning are typically performed using camera sensor input to the flight control algorithm, but the extent to which environmental disturbances like rain affect the performance of these systems is largely unknown. In this paper, we first describe the development of an open dataset comprising ~335k images to examine these effects for seven different classes of precipitation conditions and show that a worst-case average tracking error of 1.5 m is possible for a state-of-the-art visual odometry system (VINS-Fusion). We then use the dataset to train a set of deep neural network models suited to mobile and constrained deployment scenarios to determine the extent to which it may be possible to efficiently and accurately classify these `rainy' conditions. The most lightweight of these models (MobileNetV3 small) can achieve an accuracy of 90% with a memory footprint of just 1.28 MB and a frame rate of 93 FPS, which is suitable for deployment in resource-constrained and latency-sensitive systems. We demonstrate a classification latency in the order of milliseconds using typical flight computer hardware. Accordingly, such a model can feed into the disturbance estimation component of an autonomous flight controller. In addition, data from unmanned aerial vehicles with the ability to accurately determine environmental conditions in real time may contribute to developing more granular timely localised weather forecasting.
N-Adaptive Ritz Method: A Neural Network Enriched Partition of Unity for Boundary Value Problems
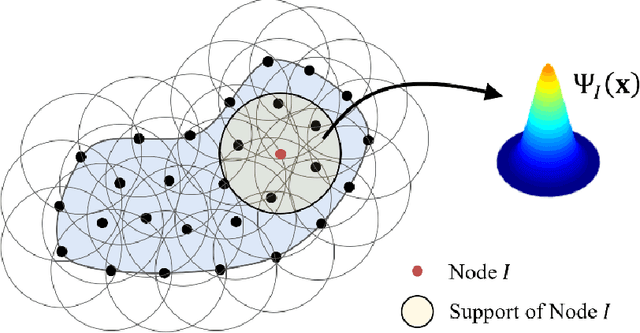
Jan 16, 2024Conventional finite element methods are known to be tedious in adaptive refinements due to their conformal regularity requirements. Further, the enrichment functions for adaptive refinements are often not readily available in general applications. This work introduces a novel neural network-enriched Partition of Unity (NN-PU) approach for solving boundary value problems via artificial neural networks with a potential energy-based loss function minimization. The flexibility and adaptivity of the NN function space are utilized to capture complex solution patterns that the conventional Galerkin methods fail to capture. The NN enrichment is constructed by combining pre-trained feature-encoded NN blocks with an additional untrained NN block. The pre-trained NN blocks learn specific local features during the offline stage, enabling efficient enrichment of the approximation space during the online stage through the Ritz-type energy minimization. The NN enrichment is introduced under the Partition of Unity (PU) framework, ensuring convergence of the proposed method. The proposed NN-PU approximation and feature-encoded transfer learning forms an adaptive approximation framework, termed the neural-refinement (n-refinement), for solving boundary value problems. Demonstrated by solving various elasticity problems, the proposed method offers accurate solutions while notably reducing the computational cost compared to the conventional adaptive refinement in the mesh-based methods.
Trajectory Estimation in Unknown Nonlinear Manifold Using Koopman Operator Theory
Dec 09, 2023
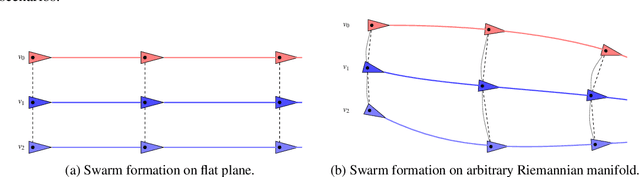
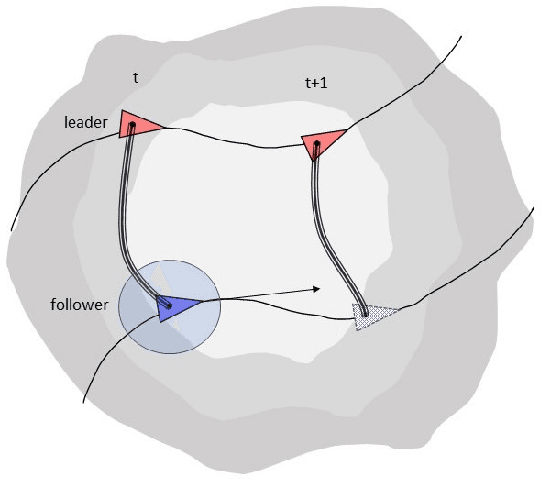
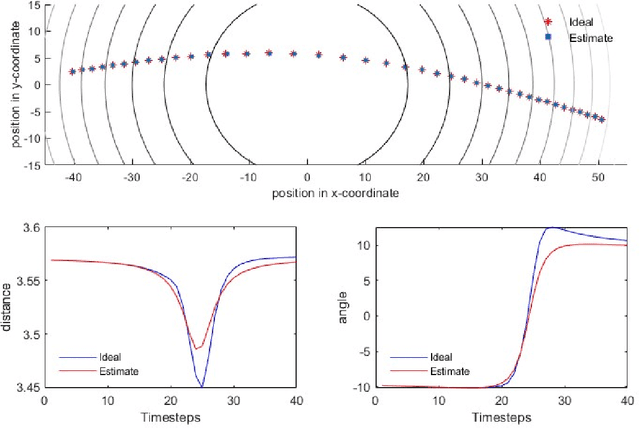
Formation coordination is a critical aspect of swarm robotics, which involves coordinating the motion and behavior of a group of robots to achieve a specific objective. In formation coordination, the robots must maintain a specific spatial arrangement while in motion. In this paper, we present a leader-follower column formation coordination problem in an unknown, two-dimensional nonlinear manifold, where we redefining it as a trajectory estimation problem. Leveraging Koopman operator theory and Extended Dynamic Mode Decomposition, we estimate the measurement vectors for the follower agent and guide its nonlinear trajectories.
On Solving Close Enough Orienteering Problem with Overlapped Neighborhoods
Oct 06, 2023The Close Enough Traveling Salesman Problem (CETSP) is a well-known variant of the classic Traveling Salesman Problem whereby the agent may complete its mission at any point within a target neighborhood. Heuristics based on overlapped neighborhoods, known as Steiner Zones (SZ), have gained attention in addressing CETSPs. While SZs offer effective approximations to the original graph, their inherent overlap imposes constraints on the search space, potentially conflicting with global optimization objectives. Here we present the Close Enough Orienteering Problem with Non-uniform Neighborhoods (CEOP-N), which extends CETSP by introducing variable prize attributes and non-uniform cost considerations for prize collection. To tackle CEOP-N, we develop a new approach featuring a Randomized Steiner Zone Discretization (RSZD) scheme coupled with a hybrid algorithm based on Particle Swarm Optimization (PSO) and Ant Colony System (ACS) - CRaSZe-AntS. The RSZD scheme identifies sub-regions for PSO exploration, and ACS determines the discrete visiting sequence. We evaluate the RSZD's discretization performance on CEOP instances derived from established CETSP instances, and compare CRaSZe-AntS against the most relevant state-of-the-art heuristic focused on single-neighborhood optimization for CEOP. We also compare the performance of the interior search within SZs and the boundary search on individual neighborhoods in the context of CEOP-N. Our results show CRaSZe-AntS can yield comparable solution quality with significantly reduced computation time compared to the single-neighborhood strategy, where we observe an averaged 140.44% increase in prize collection and 55.18% reduction of execution time. CRaSZe-AntS is thus highly effective in solving emerging CEOP-N, examples of which include truck-and-drone delivery scenarios.
Ammonia-Net: A Multi-task Joint Learning Model for Multi-class Segmentation and Classification in Tooth-marked Tongue Diagnosis
Oct 05, 2023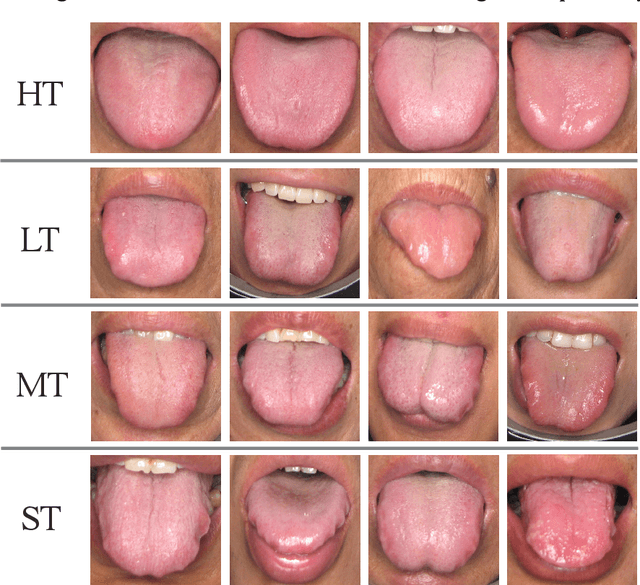
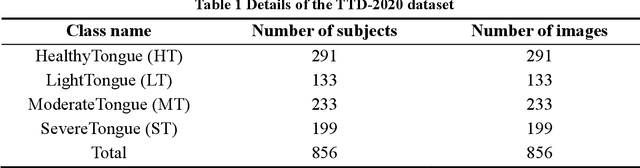
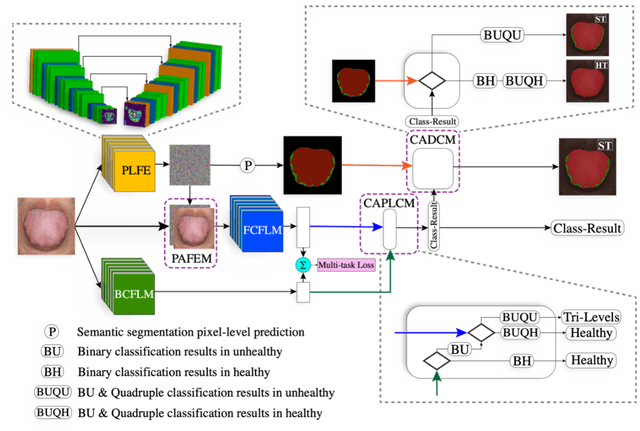
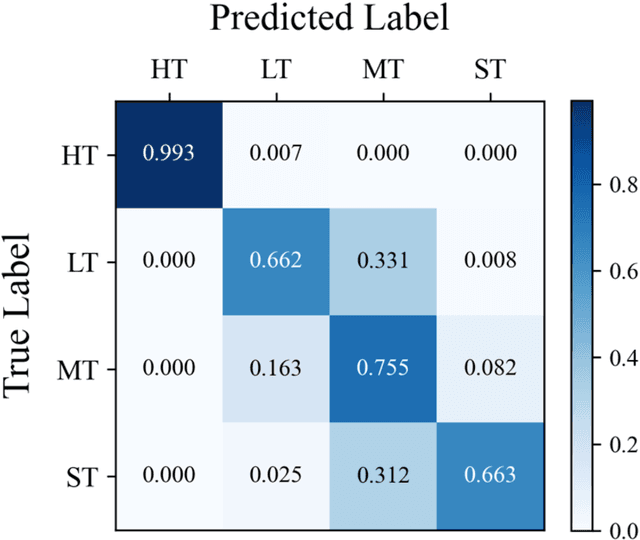
In Traditional Chinese Medicine, the tooth marks on the tongue, stemming from prolonged dental pressure, serve as a crucial indicator for assessing qi (yang) deficiency, which is intrinsically linked to visceral health. Manual diagnosis of tooth-marked tongue solely relies on experience. Nonetheless, the diversity in shape, color, and type of tooth marks poses a challenge to diagnostic accuracy and consistency. To address these problems, herein we propose a multi-task joint learning model named Ammonia-Net. This model employs a convolutional neural network-based architecture, specifically designed for multi-class segmentation and classification of tongue images. Ammonia-Net performs semantic segmentation of tongue images to identify tongue and tooth marks. With the assistance of segmentation output, it classifies the images into the desired number of classes: healthy tongue, light tongue, moderate tongue, and severe tongue. As far as we know, this is the first attempt to apply the semantic segmentation results of tooth marks for tooth-marked tongue classification. To train Ammonia-Net, we collect 856 tongue images from 856 subjects. After a number of extensive experiments, the experimental results show that the proposed model achieves 99.06% accuracy in the two-class classification task of tooth-marked tongue identification and 80.02%. As for the segmentation task, mIoU for tongue and tooth marks amounts to 71.65%.
Data-Driven Modeling of an Unsaturated Bentonite Buffer Model Test Under High Temperatures Using an Enhanced Axisymmetric Reproducing Kernel Particle Method
Sep 24, 2023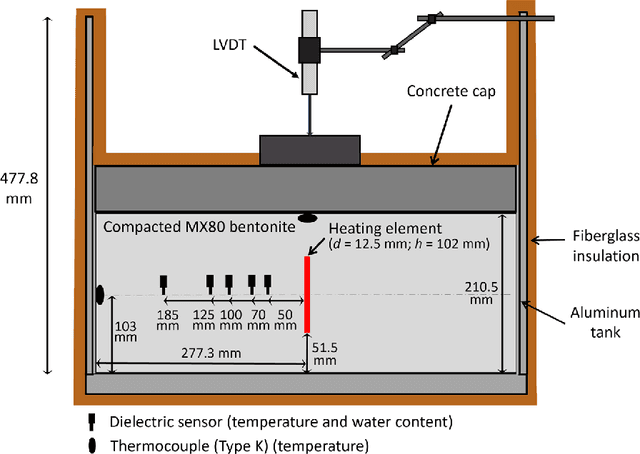
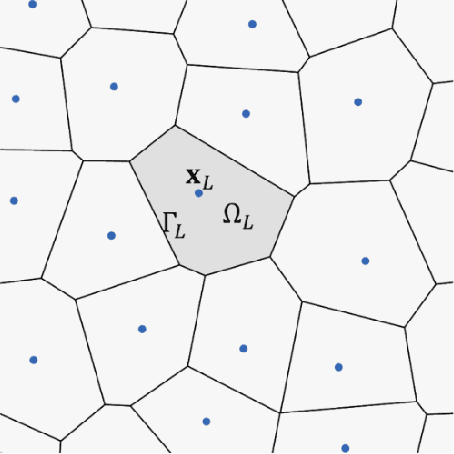
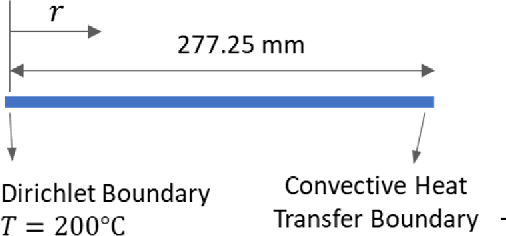
In deep geological repositories for high level nuclear waste with close canister spacings, bentonite buffers can experience temperatures higher than 100 {\deg}C. In this range of extreme temperatures, phenomenological constitutive laws face limitations in capturing the thermo-hydro-mechanical (THM) behavior of the bentonite, since the pre-defined functional constitutive laws often lack generality and flexibility to capture a wide range of complex coupling phenomena as well as the effects of stress state and path dependency. In this work, a deep neural network (DNN)-based soil-water retention curve (SWRC) of bentonite is introduced and integrated into a Reproducing Kernel Particle Method (RKPM) for conducting THM simulations of the bentonite buffer. The DNN-SWRC model incorporates temperature as an additional input variable, allowing it to learn the relationship between suction and degree of saturation under the general non-isothermal condition, which is difficult to represent using a phenomenological SWRC. For effective modeling of the tank-scale test, new axisymmetric Reproducing Kernel basis functions enriched with singular Dirichlet enforcement representing heater placement and an effective convective heat transfer coefficient representing thin-layer composite tank construction are developed. The proposed method is demonstrated through the modeling of a tank-scale experiment involving a cylindrical layer of MX-80 bentonite exposed to central heating.