 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeN-Adaptive Ritz Method: A Neural Network Enriched Partition of Unity for Boundary Value Problems
Jan 16, 2024Conventional finite element methods are known to be tedious in adaptive refinements due to their conformal regularity requirements. Further, the enrichment functions for adaptive refinements are often not readily available in general applications. This work introduces a novel neural network-enriched Partition of Unity (NN-PU) approach for solving boundary value problems via artificial neural networks with a potential energy-based loss function minimization. The flexibility and adaptivity of the NN function space are utilized to capture complex solution patterns that the conventional Galerkin methods fail to capture. The NN enrichment is constructed by combining pre-trained feature-encoded NN blocks with an additional untrained NN block. The pre-trained NN blocks learn specific local features during the offline stage, enabling efficient enrichment of the approximation space during the online stage through the Ritz-type energy minimization. The NN enrichment is introduced under the Partition of Unity (PU) framework, ensuring convergence of the proposed method. The proposed NN-PU approximation and feature-encoded transfer learning forms an adaptive approximation framework, termed the neural-refinement (n-refinement), for solving boundary value problems. Demonstrated by solving various elasticity problems, the proposed method offers accurate solutions while notably reducing the computational cost compared to the conventional adaptive refinement in the mesh-based methods.
Data-Driven Modeling of an Unsaturated Bentonite Buffer Model Test Under High Temperatures Using an Enhanced Axisymmetric Reproducing Kernel Particle Method
Sep 24, 2023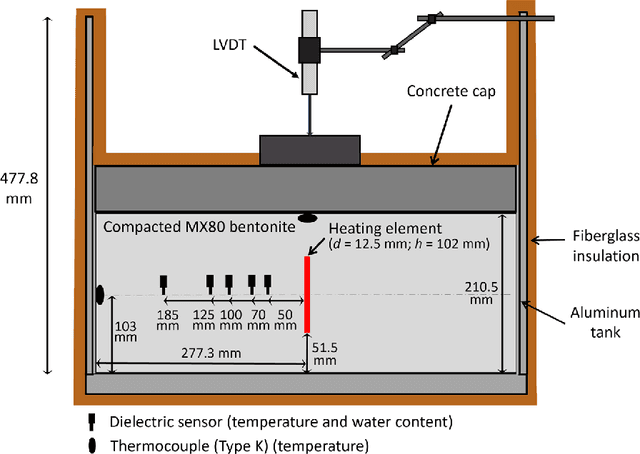
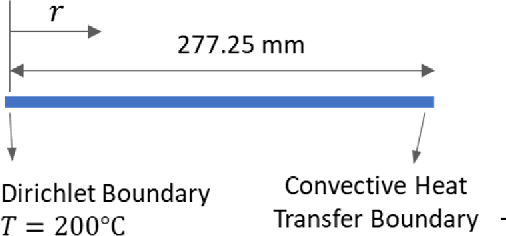
In deep geological repositories for high level nuclear waste with close canister spacings, bentonite buffers can experience temperatures higher than 100 {\deg}C. In this range of extreme temperatures, phenomenological constitutive laws face limitations in capturing the thermo-hydro-mechanical (THM) behavior of the bentonite, since the pre-defined functional constitutive laws often lack generality and flexibility to capture a wide range of complex coupling phenomena as well as the effects of stress state and path dependency. In this work, a deep neural network (DNN)-based soil-water retention curve (SWRC) of bentonite is introduced and integrated into a Reproducing Kernel Particle Method (RKPM) for conducting THM simulations of the bentonite buffer. The DNN-SWRC model incorporates temperature as an additional input variable, allowing it to learn the relationship between suction and degree of saturation under the general non-isothermal condition, which is difficult to represent using a phenomenological SWRC. For effective modeling of the tank-scale test, new axisymmetric Reproducing Kernel basis functions enriched with singular Dirichlet enforcement representing heater placement and an effective convective heat transfer coefficient representing thin-layer composite tank construction are developed. The proposed method is demonstrated through the modeling of a tank-scale experiment involving a cylindrical layer of MX-80 bentonite exposed to central heating.
A Multi-Resolution Physics-Informed Recurrent Neural Network: Formulation and Application to Musculoskeletal Systems
May 26, 2023This work presents a multi-resolution physics-informed recurrent neural network (MR PI-RNN), for simultaneous prediction of musculoskeletal (MSK) motion and parameter identification of the MSK systems. The MSK application was selected as the model problem due to its challenging nature in mapping the high-frequency surface electromyography (sEMG) signals to the low-frequency body joint motion controlled by the MSK and muscle contraction dynamics. The proposed method utilizes the fast wavelet transform to decompose the mixed frequency input sEMG and output joint motion signals into nested multi-resolution signals. The prediction model is subsequently trained on coarser-scale input-output signals using a gated recurrent unit (GRU), and then the trained parameters are transferred to the next level of training with finer-scale signals. These training processes are repeated recursively under a transfer-learning fashion until the full-scale training (i.e., with unfiltered signals) is achieved, while satisfying the underlying dynamic equilibrium. Numerical examples on recorded subject data demonstrate the effectiveness of the proposed framework in generating a physics-informed forward-dynamics surrogate, which yields higher accuracy in motion predictions of elbow flexion-extension of an MSK system compared to the case with single-scale training. The framework is also capable of identifying muscle parameters that are physiologically consistent with the subject's kinematics data.
Support Vector Machine Guided Reproducing Kernel Particle Method for Image-Based Modeling of Microstructures
May 23, 2023This work presents an approach for automating the discretization and approximation procedures in constructing digital representations of composites from Micro-CT images featuring intricate microstructures. The proposed method is guided by the Support Vector Machine (SVM) classification, offering an effective approach for discretizing microstructural images. An SVM soft margin training process is introduced as a classification of heterogeneous material points, and image segmentation is accomplished by identifying support vectors through a local regularized optimization problem. In addition, an Interface-Modified Reproducing Kernel Particle Method (IM-RKPM) is proposed for appropriate approximations of weak discontinuities across material interfaces. The proposed method modifies the smooth kernel functions with a regularized heavy-side function concerning the material interfaces to alleviate Gibb's oscillations. This IM-RKPM is formulated without introducing duplicated degrees of freedom associated with the interface nodes commonly needed in the conventional treatments of weak discontinuities in the meshfree methods. Moreover, IM-RKPM can be implemented with various domain integration techniques, such as Stabilized Conforming Nodal Integration (SCNI). The extension of the proposed method to 3-dimension is straightforward, and the effectiveness of the proposed method is validated through the image-based modeling of polymer-ceramic composite microstructures.
Wavelet Based Iterative Learning Control with Fuzzy PD Feedback for Position Tracking of A Pneumatic Servo System
Apr 30, 2008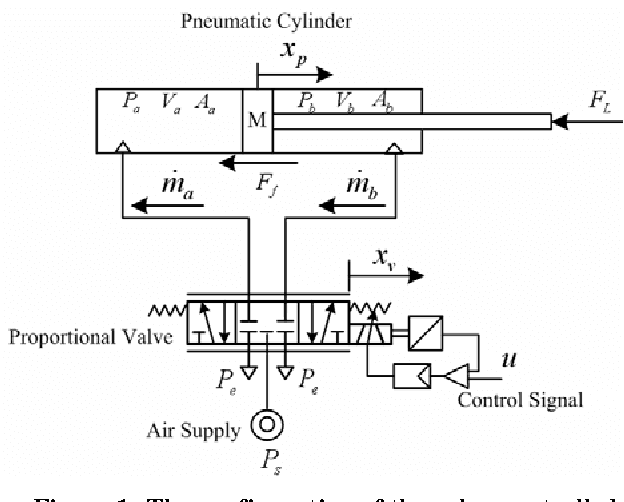
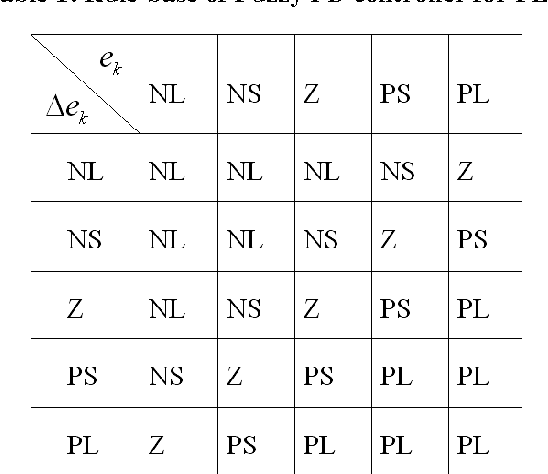
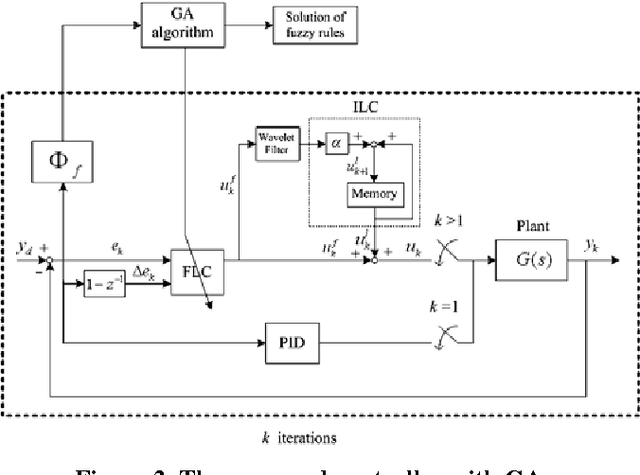
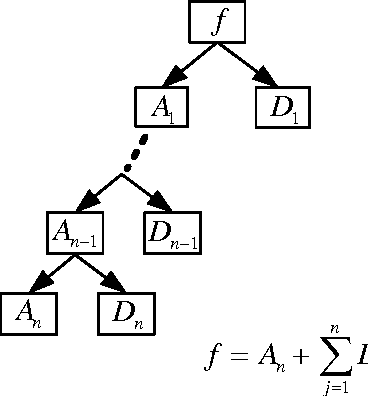
In this paper, a wavelet-based iterative learning control (WILC) scheme with Fuzzy PD feedback is presented for a pneumatic control system with nonsmooth nonlinearities and uncertain parameters. The wavelet transform is employed to extract the learnable dynamics from measured output signal before it can be used to update the control profile. The wavelet transform is adopted to decompose the original signal into many low-resolution signals that contain the learnable and unlearnable parts. The desired control profile is then compared with the learnable part of the transformed signal. Thus, the effects from unlearnable dynamics on the controlled system can be attenuated by a Fuzzy PD feedback controller. As for the rules of Fuzzy PD controller in the feedback loop, a genetic algorithm (GA) is employed to search for the inference rules of optimization. A proportional-valve controlled pneumatic cylinder actuator system is used as the control target for simulation. Simulation results have shown a much-improved positiontracking performance.
* Uploaded by ICIUS2007 Conference Organizer on behalf of the author(s). 8 pages, 9 figures, 1 tables