 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-Resolution Physics-Informed Recurrent Neural Network: Formulation and Application to Musculoskeletal Systems
May 26, 2023This work presents a multi-resolution physics-informed recurrent neural network (MR PI-RNN), for simultaneous prediction of musculoskeletal (MSK) motion and parameter identification of the MSK systems. The MSK application was selected as the model problem due to its challenging nature in mapping the high-frequency surface electromyography (sEMG) signals to the low-frequency body joint motion controlled by the MSK and muscle contraction dynamics. The proposed method utilizes the fast wavelet transform to decompose the mixed frequency input sEMG and output joint motion signals into nested multi-resolution signals. The prediction model is subsequently trained on coarser-scale input-output signals using a gated recurrent unit (GRU), and then the trained parameters are transferred to the next level of training with finer-scale signals. These training processes are repeated recursively under a transfer-learning fashion until the full-scale training (i.e., with unfiltered signals) is achieved, while satisfying the underlying dynamic equilibrium. Numerical examples on recorded subject data demonstrate the effectiveness of the proposed framework in generating a physics-informed forward-dynamics surrogate, which yields higher accuracy in motion predictions of elbow flexion-extension of an MSK system compared to the case with single-scale training. The framework is also capable of identifying muscle parameters that are physiologically consistent with the subject's kinematics data.
Deep autoencoders for physics-constrained data-driven nonlinear materials modeling
Sep 03, 2022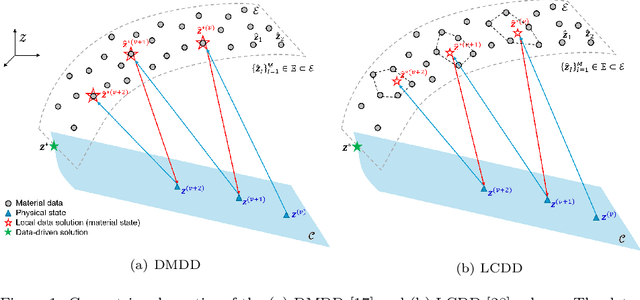

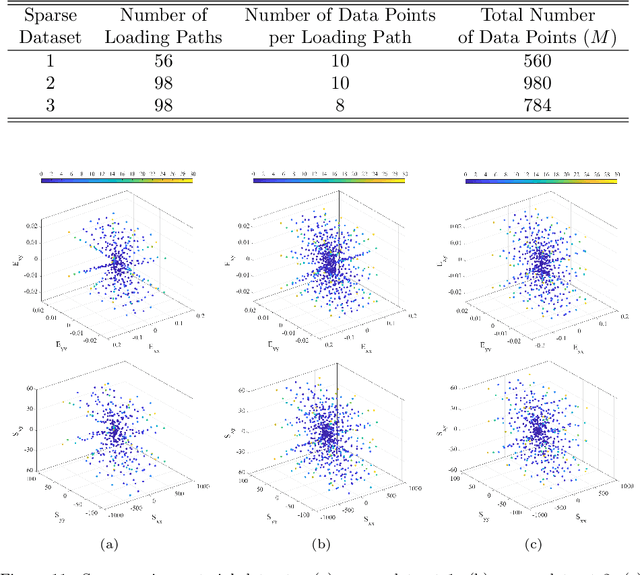
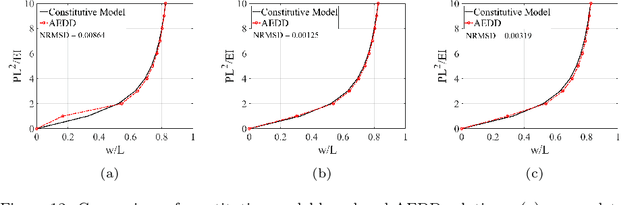
Physics-constrained data-driven computing is an emerging computational paradigm that allows simulation of complex materials directly based on material database and bypass the classical constitutive model construction. However, it remains difficult to deal with high-dimensional applications and extrapolative generalization. This paper introduces deep learning techniques under the data-driven framework to address these fundamental issues in nonlinear materials modeling. To this end, an autoencoder neural network architecture is introduced to learn the underlying low-dimensional representation (embedding) of the given material database. The offline trained autoencoder and the discovered embedding space are then incorporated in the online data-driven computation such that the search of optimal material state from database can be performed on a low-dimensional space, aiming to enhance the robustness and predictability with projected material data. To ensure numerical stability and representative constitutive manifold, a convexity-preserving interpolation scheme tailored to the proposed autoencoder-based data-driven solver is proposed for constructing the material state. In this study, the applicability of the proposed approach is demonstrated by modeling nonlinear biological tissues. A parametric study on data noise, data size and sparsity, training initialization, and model architectures, is also conducted to examine the robustness and convergence property of the proposed approach.
Flying Through a Narrow Gap Using End-to-end Deep Reinforcement Learning Augmented with Curriculum Learning and Sim2Real
Aug 29, 2021
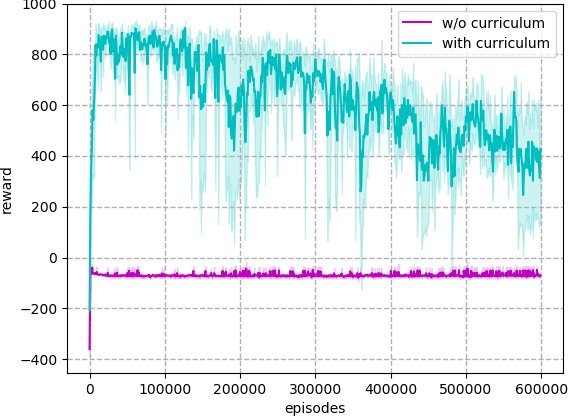
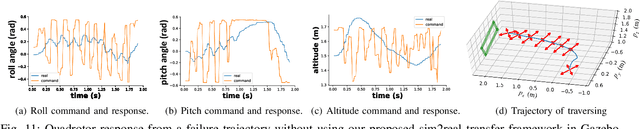
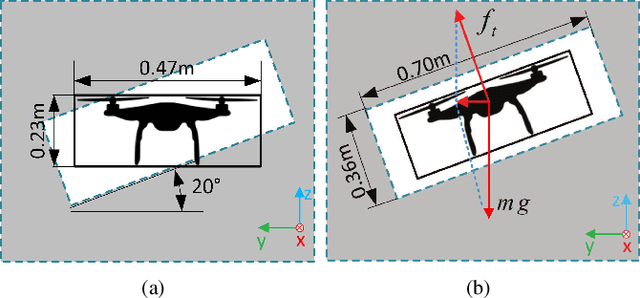
Traversing through a tilted narrow gap is previously an intractable task for reinforcement learning mainly due to two challenges. First, searching feasible trajectories is not trivial because the goal behind the gap is difficult to reach. Second, the error tolerance after Sim2Real is low due to the relatively high speed in comparison to the gap's narrow dimensions. This problem is aggravated by the intractability of collecting real-world data due to the risk of collision damage. In this paper, we propose an end-to-end reinforcement learning framework that solves this task successfully by addressing both problems. To search for dynamically feasible flight trajectories, we use curriculum learning to guide the agent towards the sparse reward behind the obstacle. To tackle the Sim2Real problem, we propose a Sim2Real framework that can transfer control commands to a real quadrotor without using real flight data. To the best of our knowledge, our paper is the first work that accomplishes successful gap traversing task purely using deep reinforcement learning.
Patient Specific Biomechanics Are Clinically Significant In Accurate Computer Aided Surgical Image Guidance
Jan 29, 2020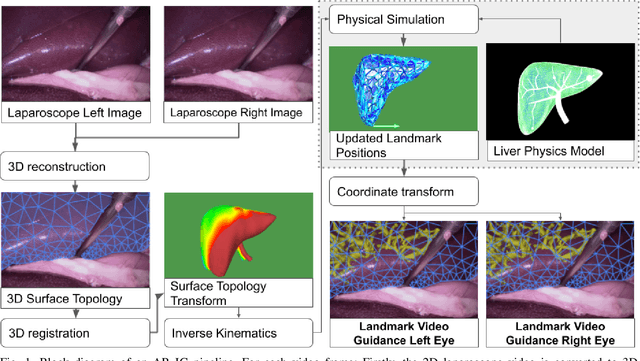
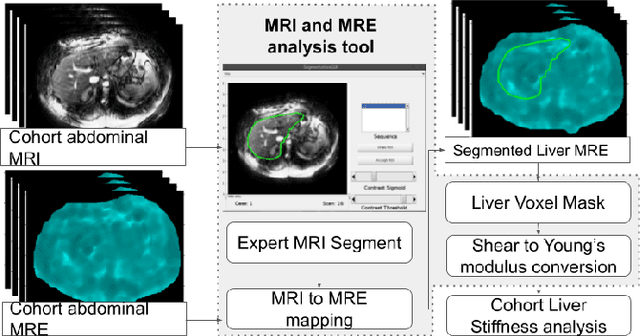
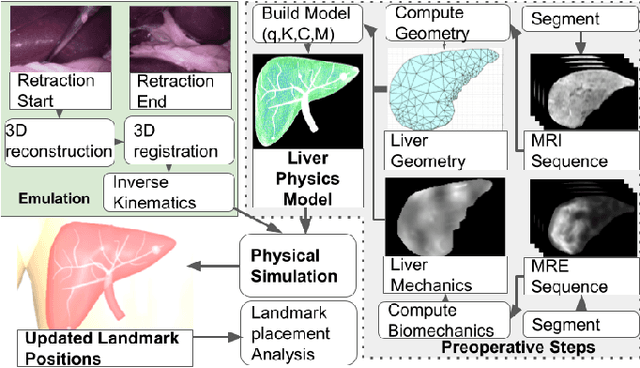
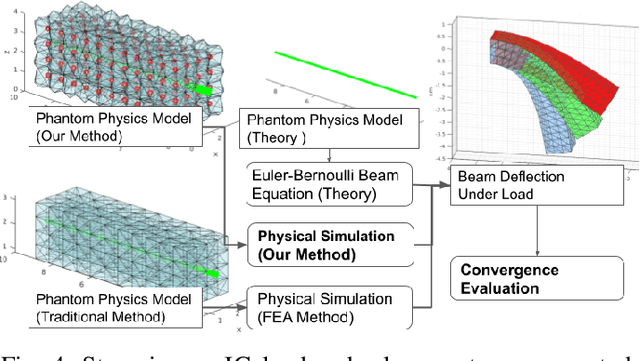
Augmented Reality is used in Image Guided surgery (AR IG) to fuse surgical landmarks from preoperative images into a video overlay. Physical simulation is essential to maintaining accurate position of the landmarks as surgery progresses and ensuring patient safety by avoiding accidental damage to vessels etc. In liver procedures, AR IG simulation accuracy is hampered by an inability to model stiffness variations unique to the patients disease. We introduce a novel method to account for patient specific stiffness variation based on Magnetic Resonance Elastography (MRE) data. To the best of our knowledge we are the first to demonstrate the use of in-vivo biomechanical data for AR IG landmark placement. In this early work, a comparative evaluation of our MRE data driven simulation and the traditional method shows clinically significant differences in accuracy during landmark placement and motivates further animal model trials.