 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comprehensive Review of Latent Space Dynamics Identification Algorithms for Intrusive and Non-Intrusive Reduced-Order-Modeling
Mar 16, 2024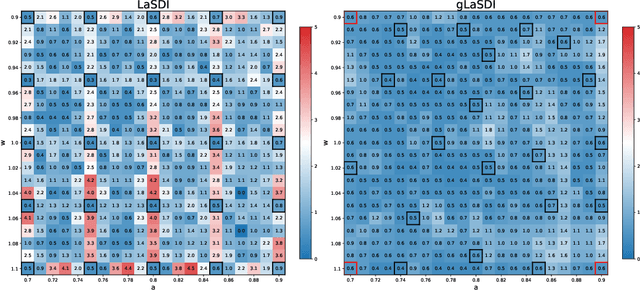
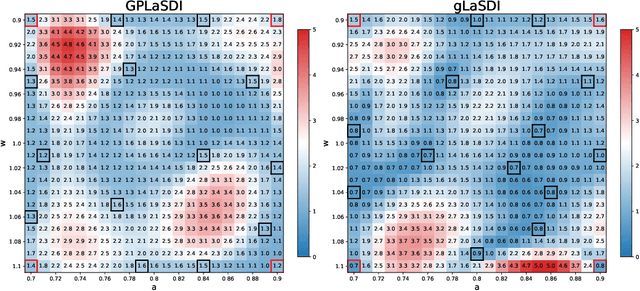
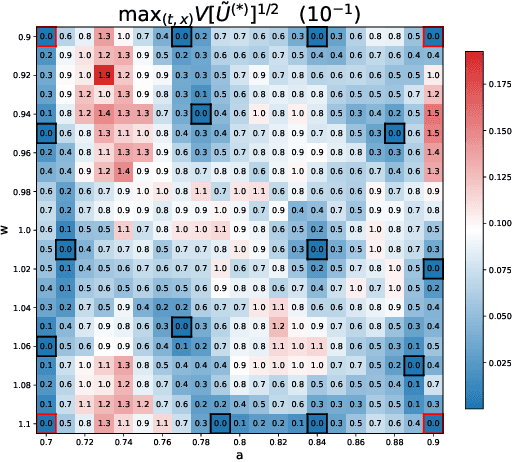
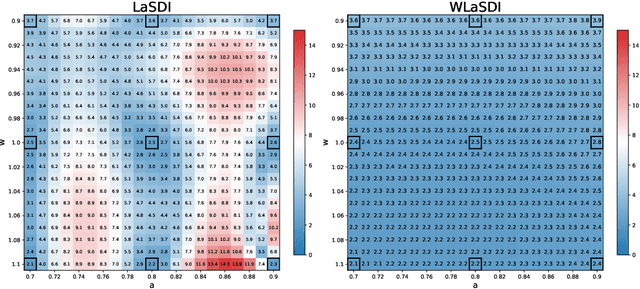
Numerical solvers of partial differential equations (PDEs) have been widely employed for simulating physical systems. However, the computational cost remains a major bottleneck in various scientific and engineering applications, which has motivated the development of reduced-order models (ROMs). Recently, machine-learning-based ROMs have gained significant popularity and are promising for addressing some limitations of traditional ROM methods, especially for advection dominated systems. In this chapter, we focus on a particular framework known as Latent Space Dynamics Identification (LaSDI), which transforms the high-fidelity data, governed by a PDE, to simpler and low-dimensional latent-space data, governed by ordinary differential equations (ODEs). These ODEs can be learned and subsequently interpolated to make ROM predictions. Each building block of LaSDI can be easily modulated depending on the application, which makes the LaSDI framework highly flexible. In particular, we present strategies to enforce the laws of thermodynamics into LaSDI models (tLaSDI), enhance robustness in the presence of noise through the weak form (WLaSDI), select high-fidelity training data efficiently through active learning (gLaSDI, GPLaSDI), and quantify the ROM prediction uncertainty through Gaussian processes (GPLaSDI). We demonstrate the performance of different LaSDI approaches on Burgers equation, a non-linear heat conduction problem, and a plasma physics problem, showing that LaSDI algorithms can achieve relative errors of less than a few percent and up to thousands of times speed-ups.
A Neural Network-Based Enrichment of Reproducing Kernel Approximation for Modeling Brittle Fracture
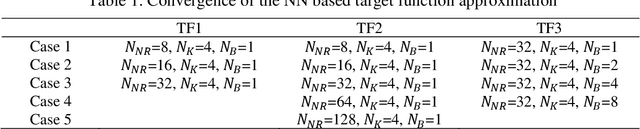
Jul 04, 2023Numerical modeling of localizations is a challenging task due to the evolving rough solution in which the localization paths are not predefined. Despite decades of efforts, there is a need for innovative discretization-independent computational methods to predict the evolution of localizations. In this work, an improved version of the neural network-enhanced Reproducing Kernel Particle Method (NN-RKPM) is proposed for modeling brittle fracture. In the proposed method, a background reproducing kernel (RK) approximation defined on a coarse and uniform discretization is enriched by a neural network (NN) approximation under a Partition of Unity framework. In the NN approximation, the deep neural network automatically locates and inserts regularized discontinuities in the function space. The NN-based enrichment functions are then patched together with RK approximation functions using RK as a Partition of Unity patching function. The optimum NN parameters defining the location, orientation, and displacement distribution across location together with RK approximation coefficients are obtained via the energy-based loss function minimization. To regularize the NN-RK approximation, a constraint on the spatial gradient of the parametric coordinates is imposed in the loss function. Analysis of the convergence properties shows that the solution convergence of the proposed method is guaranteed. The effectiveness of the proposed method is demonstrated by a series of numerical examples involving damage propagation and branching.
Certified data-driven physics-informed greedy auto-encoder simulator
Nov 24, 2022A parametric adaptive greedy Latent Space Dynamics Identification (gLaSDI) framework is developed for accurate, efficient, and certified data-driven physics-informed greedy auto-encoder simulators of high-dimensional nonlinear dynamical systems. In the proposed framework, an auto-encoder and dynamics identification models are trained interactively to discover intrinsic and simple latent-space dynamics. To effectively explore the parameter space for optimal model performance, an adaptive greedy sampling algorithm integrated with a physics-informed error indicator is introduced to search for optimal training samples on the fly, outperforming the conventional predefined uniform sampling. Further, an efficient k-nearest neighbor convex interpolation scheme is employed to exploit local latent-space dynamics for improved predictability. Numerical results demonstrate that the proposed method achieves 121 to 2,658x speed-up with 1 to 5% relative errors for radial advection and 2D Burgers dynamical problems.
Deep autoencoders for physics-constrained data-driven nonlinear materials modeling
Sep 03, 2022

Physics-constrained data-driven computing is an emerging computational paradigm that allows simulation of complex materials directly based on material database and bypass the classical constitutive model construction. However, it remains difficult to deal with high-dimensional applications and extrapolative generalization. This paper introduces deep learning techniques under the data-driven framework to address these fundamental issues in nonlinear materials modeling. To this end, an autoencoder neural network architecture is introduced to learn the underlying low-dimensional representation (embedding) of the given material database. The offline trained autoencoder and the discovered embedding space are then incorporated in the online data-driven computation such that the search of optimal material state from database can be performed on a low-dimensional space, aiming to enhance the robustness and predictability with projected material data. To ensure numerical stability and representative constitutive manifold, a convexity-preserving interpolation scheme tailored to the proposed autoencoder-based data-driven solver is proposed for constructing the material state. In this study, the applicability of the proposed approach is demonstrated by modeling nonlinear biological tissues. A parametric study on data noise, data size and sparsity, training initialization, and model architectures, is also conducted to examine the robustness and convergence property of the proposed approach.
Thermodynamically Consistent Machine-Learned Internal State Variable Approach for Data-Driven Modeling of Path-Dependent Materials
May 01, 2022

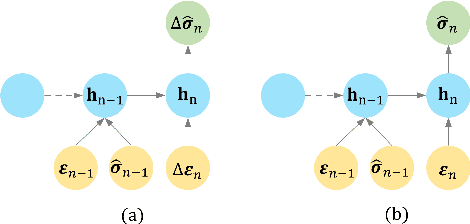

Characterization and modeling of path-dependent behaviors of complex materials by phenomenological models remains challenging due to difficulties in formulating mathematical expressions and internal state variables (ISVs) governing path-dependent behaviors. Data-driven machine learning models, such as deep neural networks and recurrent neural networks (RNNs), have become viable alternatives. However, pure black-box data-driven models mapping inputs to outputs without considering the underlying physics suffer from unstable and inaccurate generalization performance. This study proposes a machine-learned physics-informed data-driven constitutive modeling approach for path-dependent materials based on the measurable material states. The proposed data-driven constitutive model is designed with the consideration of universal thermodynamics principles, where the ISVs essential to the material path-dependency are inferred automatically from the hidden state of RNNs. The RNN describing the evolution of the data-driven machine-learned ISVs follows the thermodynamics second law. To enhance the robustness and accuracy of RNN models, stochasticity is introduced to model training. The effects of the number of RNN history steps, the internal state dimension, the model complexity, and the strain increment on model performances have been investigated. The effectiveness of the proposed method is evaluated by modeling soil material behaviors under cyclic shear loading using experimental stress-strain data.
A Neural Network-enhanced Reproducing Kernel Particle Method for Modeling Strain Localization
Apr 28, 2022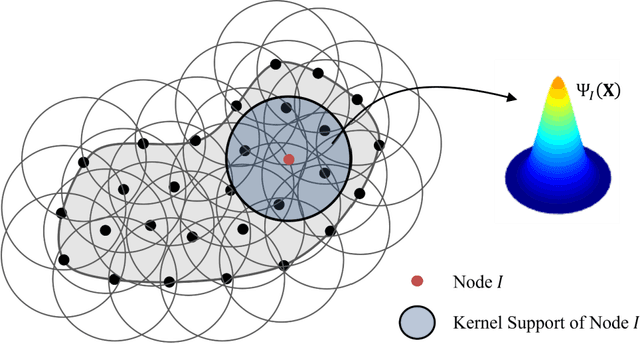
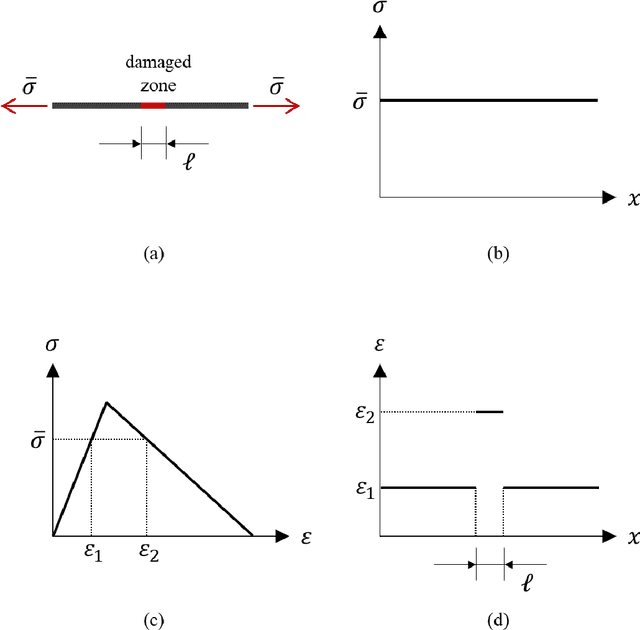
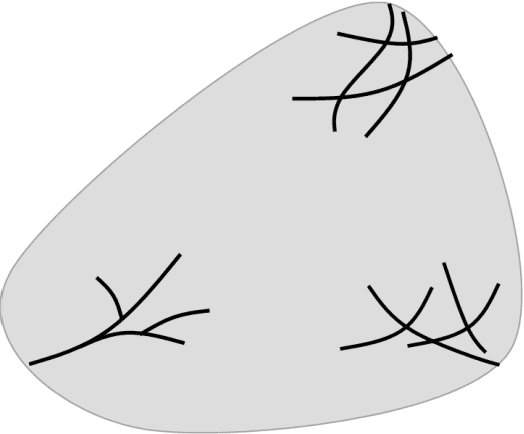
Modeling the localized intensive deformation in a damaged solid requires highly refined discretization for accurate prediction, which significantly increases the computational cost. Although adaptive model refinement can be employed for enhanced effectiveness, it is cumbersome for the traditional mesh-based methods to perform while modeling the evolving localizations. In this work, neural network-enhanced reproducing kernel particle method (NN-RKPM) is proposed, where the location, orientation, and shape of the solution transition near a localization is automatically captured by the NN approximation via a block-level neural network optimization. The weights and biases in the blocked parametrization network control the location and orientation of the localization. The designed basic four-kernel NN block is capable of capturing a triple junction or a quadruple junction topological pattern, while more complicated localization topological patters are captured by the superposition of multiple four-kernel NN blocks. The standard RK approximation is then utilized to approximate the smooth part of the solution, which permits a much coarser discretization than the high-resolution discretization needed to capture sharp solution transitions with the conventional methods. A regularization of the neural network approximation is additionally introduced for discretization-independent material responses. The effectiveness of the proposed NN-RKPM is verified by a series of numerical verifications.
gLaSDI: Parametric Physics-informed Greedy Latent Space Dynamics Identification
Apr 26, 2022


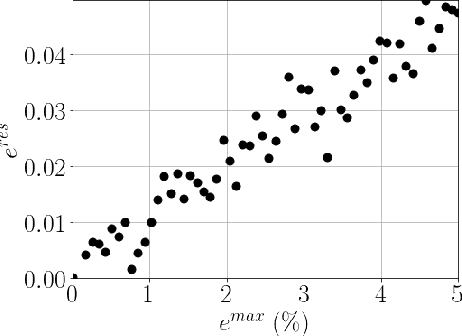
A parametric adaptive physics-informed greedy Latent Space Dynamics Identification (gLaSDI) method is proposed for accurate, efficient, and robust data-driven reduced-order modeling of high-dimensional nonlinear dynamical systems. In the proposed gLaSDI framework, an autoencoder discovers intrinsic nonlinear latent representations of high-dimensional data, while dynamics identification (DI) models capture local latent-space dynamics. An interactive training algorithm is adopted for the autoencoder and local DI models, which enables identification of simple latent-space dynamics and enhances accuracy and efficiency of data-driven reduced-order modeling. To maximize and accelerate the exploration of the parameter space for the optimal model performance, an adaptive greedy sampling algorithm integrated with a physics-informed residual-based error indicator and random-subset evaluation is introduced to search for the optimal training samples on-the-fly. Further, to exploit local latent-space dynamics captured by the local DI models for an improved modeling accuracy with a minimum number of local DI models in the parameter space, an efficient k-nearest neighbor convex interpolation scheme is employed. The effectiveness of the proposed framework is demonstrated by modeling various nonlinear dynamical problems, including Burgers equations, nonlinear heat conduction, and radial advection. The proposed adaptive greedy sampling outperforms the conventional predefined uniform sampling in terms of accuracy. Compared with the high-fidelity models, gLaSDI achieves 66 to 4,417x speed-up with 1 to 5% relative errors.