 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMFE: A Multimodal Hand Exoskeleton with Interactive Force, Pressure and Thermo-haptic Feedback
Apr 03, 2026Recent advancements in virtual reality and robotic teleoperation have greatly increased the variety of haptic information that must be conveyed to users. While existing haptic devices typically provide unimodal feedback to enhance situational awareness, a gap remains in their ability to deliver rich, multimodal sensory feedback encompassing force, pressure, and thermal sensations. To address this limitation, we present the Multimodal Feedback Exoskeleton (MFE), a hand exoskeleton designed to deliver hybrid haptic feedback. The MFE features 20 degrees of freedom for capturing hand pose. For force feedback, it employs an active mechanism capable of generating 3.5-8.1 N of pushing and pulling forces at the fingers' resting pose, enabling realistic interaction with deformable objects. The fingertips are equipped with flat actuators based on the electro-osmotic principle, providing pressure and vibration stimuli and achieving up to 2.47 kPa of contact pressure to render tactile sensations. For thermal feedback, the MFE integrates thermoelectric heat pumps capable of rendering temperatures from 10 to 55 degrees Celsius. We validated the MFE by integrating it into a robotic teleoperation system using the X-Arm 6 and Inspire Hand manipulator. In user studies, participants successfully recognized and manipulated deformable objects and differentiated remote objects with varying temperatures. These results demonstrate that the MFE enhances situational awareness, as well as the usability and transparency of robotic teleoperation systems.
* 8 pages, 7 figures, 2 tables
NLiPsCalib: An Efficient Calibration Framework for High-Fidelity 3D Reconstruction of Curved Visuotactile Sensors
Mar 10, 2026Recent advances in visuotactile sensors increasingly employ biomimetic curved surfaces to enhance sensorimotor capabilities. Although such curved visuotactile sensors enable more conformal object contact, their perceptual quality is often degraded by non-uniform illumination, which reduces reconstruction accuracy and typically necessitates calibration. Existing calibration methods commonly rely on customized indenters and specialized devices to collect large-scale photometric data, but these processes are expensive and labor-intensive. To overcome these calibration challenges, we present NLiPsCalib, a physics-consistent and efficient calibration framework for curved visuotactile sensors. NLiPsCalib integrates controllable near-field light sources and leverages Near-Light Photometric Stereo (NLiPs) to estimate contact geometry, simplifying calibration to just a few simple contacts with everyday objects. We further introduce NLiPsTac, a controllable-light-source tactile sensor developed to validate our framework. Experimental results demonstrate that our approach enables high-fidelity 3D reconstruction across diverse curved form factors with a simple calibration procedure. We emphasize that our approach lowers the barrier to developing customized visuotactile sensors of diverse geometries, thereby making visuotactile sensing more accessible to the broader community.
TaF-VLA: Tactile-Force Alignment in Vision-Language-Action Models for Force-aware Manipulation
Jan 30, 2026Vision-Language-Action (VLA) models have recently emerged as powerful generalists for robotic manipulation. However, due to their predominant reliance on visual modalities, they fundamentally lack the physical intuition required for contact-rich tasks that require precise force regulation and physical reasoning. Existing attempts to incorporate vision-based tactile sensing into VLA models typically treat tactile inputs as auxiliary visual textures, thereby overlooking the underlying correlation between surface deformation and interaction dynamics. To bridge this gap, we propose a paradigm shift from tactile-vision alignment to tactile-force alignment. Here, we introduce TaF-VLA, a framework that explicitly grounds high-dimensional tactile observations in physical interaction forces. To facilitate this, we develop an automated tactile-force data acquisition device and curate the TaF-Dataset, comprising over 10 million synchronized tactile observations, 6-axis force/torque, and matrix force map. To align sequential tactile observations with interaction forces, the central component of our approach is the Tactile-Force Adapter (TaF-Adapter), a tactile sensor encoder that extracts discretized latent information for encoding tactile observations. This mechanism ensures that the learned representations capture history-dependent, noise-insensitive physical dynamics rather than static visual textures. Finally, we integrate this force-aligned encoder into a VLA backbone. Extensive real-world experiments demonstrate that TaF-VLA policy significantly outperforms state-of-the-art tactile-vision-aligned and vision-only baselines on contact-rich tasks, verifying its ability to achieve robust, force-aware manipulation through cross-modal physical reasoning.
Tactile-Force Alignment in Vision-Language-Action Models for Force-aware Manipulation
Jan 28, 2026Vision-Language-Action (VLA) models have recently emerged as powerful generalists for robotic manipulation. However, due to their predominant reliance on visual modalities, they fundamentally lack the physical intuition required for contact-rich tasks that require precise force regulation and physical reasoning. Existing attempts to incorporate vision-based tactile sensing into VLA models typically treat tactile inputs as auxiliary visual textures, thereby overlooking the underlying correlation between surface deformation and interaction dynamics. To bridge this gap, we propose a paradigm shift from tactile-vision alignment to tactile-force alignment. Here, we introduce TaF-VLA, a framework that explicitly grounds high-dimensional tactile observations in physical interaction forces. To facilitate this, we develop an automated tactile-force data acquisition device and curate the TaF-Dataset, comprising over 10 million synchronized tactile observations, 6-axis force/torque, and matrix force map. To align sequential tactile observations with interaction forces, the central component of our approach is the Tactile-Force Adapter (TaF-Adapter), a tactile sensor encoder that extracts discretized latent information for encoding tactile observations. This mechanism ensures that the learned representations capture history-dependent, noise-insensitive physical dynamics rather than static visual textures. Finally, we integrate this force-aligned encoder into a VLA backbone. Extensive real-world experiments demonstrate that TaF-VLA policy significantly outperforms state-of-the-art tactile-vision-aligned and vision-only baselines on contact-rich tasks, verifying its ability to achieve robust, force-aware manipulation through cross-modal physical reasoning.
PP-Tac: Paper Picking Using Tactile Feedback in Dexterous Robotic Hands
Apr 23, 2025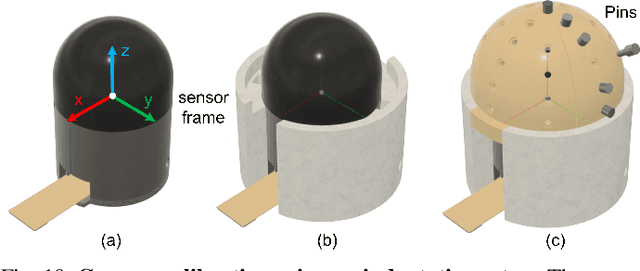
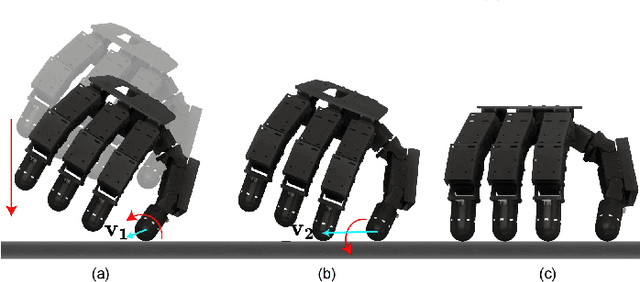
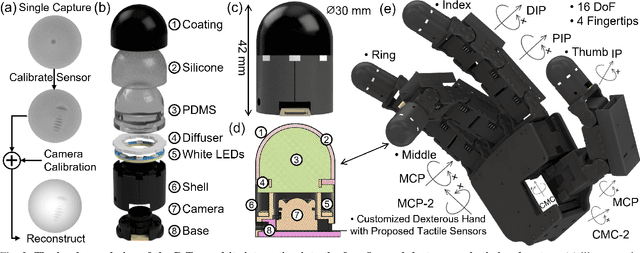
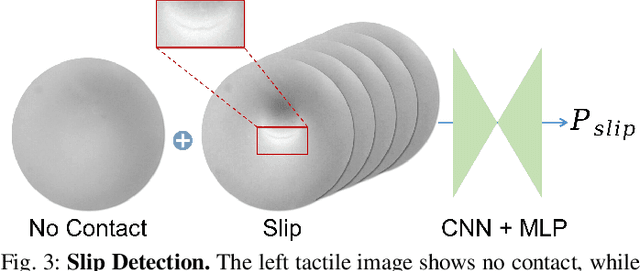
Robots are increasingly envisioned as human companions, assisting with everyday tasks that often involve manipulating deformable objects. Although recent advances in robotic hardware and embodied AI have expanded their capabilities, current systems still struggle with handling thin, flat, and deformable objects such as paper and fabric. This limitation arises from the lack of suitable perception techniques for robust state estimation under diverse object appearances, as well as the absence of planning techniques for generating appropriate grasp motions. To bridge these gaps, this paper introduces PP-Tac, a robotic system for picking up paper-like objects. PP-Tac features a multi-fingered robotic hand with high-resolution omnidirectional tactile sensors \sensorname. This hardware configuration enables real-time slip detection and online frictional force control that mitigates such slips. Furthermore, grasp motion generation is achieved through a trajectory synthesis pipeline, which first constructs a dataset of finger's pinching motions. Based on this dataset, a diffusion-based policy is trained to control the hand-arm robotic system. Experiments demonstrate that PP-Tac can effectively grasp paper-like objects of varying material, thickness, and stiffness, achieving an overall success rate of 87.5\%. To our knowledge, this work is the first attempt to grasp paper-like deformable objects using a tactile dexterous hand. Our project webpage can be found at: https://peilin-666.github.io/projects/PP-Tac/
Bimanual Grasp Synthesis for Dexterous Robot Hands
Nov 24, 2024



Humans naturally perform bimanual skills to handle large and heavy objects. To enhance robots' object manipulation capabilities, generating effective bimanual grasp poses is essential. Nevertheless, bimanual grasp synthesis for dexterous hand manipulators remains underexplored. To bridge this gap, we propose the BimanGrasp algorithm for synthesizing bimanual grasps on 3D objects. The BimanGrasp algorithm generates grasp poses by optimizing an energy function that considers grasp stability and feasibility. Furthermore, the synthesized grasps are verified using the Isaac Gym physics simulation engine. These verified grasp poses form the BimanGrasp-Dataset, the first large-scale synthesized bimanual dexterous hand grasp pose dataset to our knowledge. The dataset comprises over 150k verified grasps on 900 objects, facilitating the synthesis of bimanual grasps through a data-driven approach. Last, we propose BimanGrasp-DDPM, a diffusion model trained on the BimanGrasp-Dataset. This model achieved a grasp synthesis success rate of 69.87\% and significant acceleration in computational speed compared to BimanGrasp algorithm.
* Published in RA-L 24', 8 pages, 9 figures, 3 tables
HumanFT: A Human-like Fingertip Multimodal Visuo-Tactile Sensor
Oct 14, 2024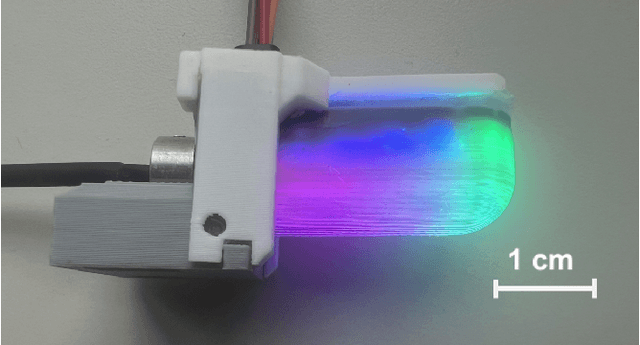
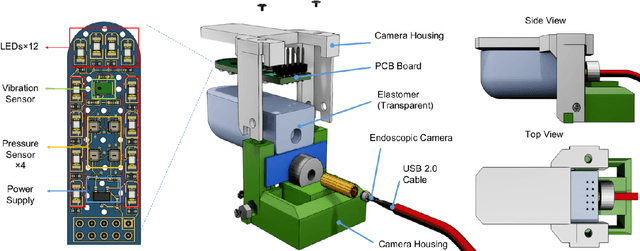
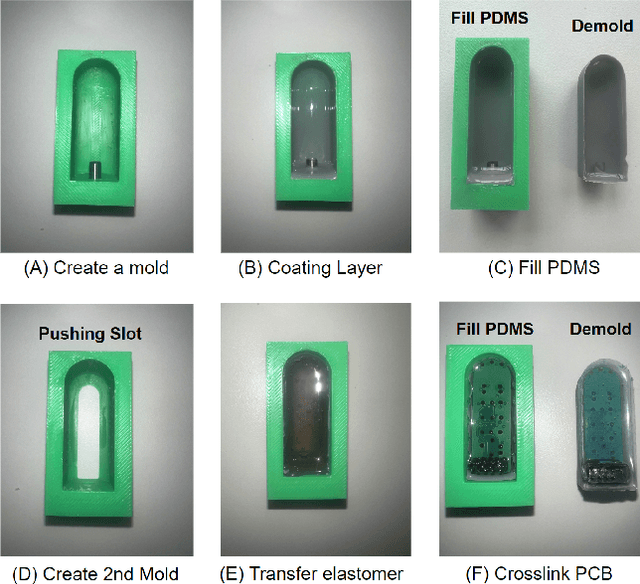
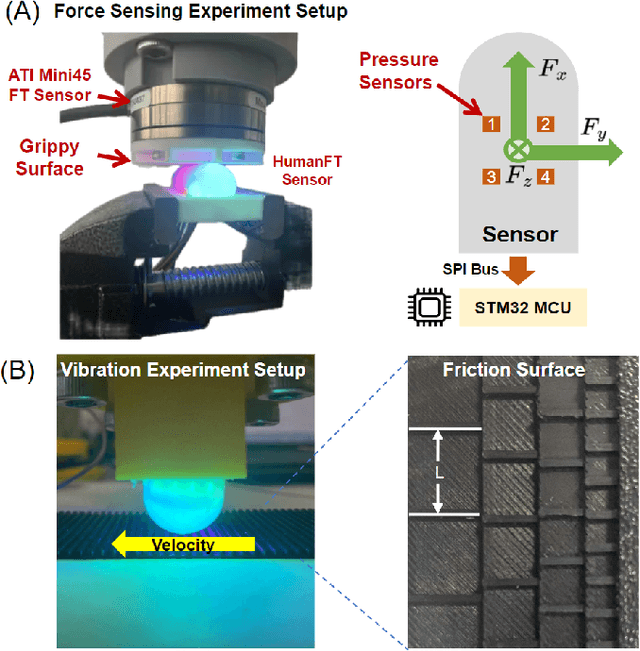
Tactile sensors play a crucial role in enabling robots to interact effectively and safely with objects in everyday tasks. In particular, visuotactile sensors have seen increasing usage in two and three-fingered grippers due to their high-quality feedback. However, a significant gap remains in the development of sensors suitable for humanoid robots, especially five-fingered dexterous hands. One reason is because of the challenges in designing and manufacturing sensors that are compact in size. In this paper, we propose HumanFT, a multimodal visuotactile sensor that replicates the shape and functionality of a human fingertip. To bridge the gap between human and robotic tactile sensing, our sensor features real-time force measurements, high-frequency vibration detection, and overtemperature alerts. To achieve this, we developed a suite of fabrication techniques for a new type of elastomer optimized for force propagation and temperature sensing. Besides, our sensor integrates circuits capable of sensing pressure and vibration. These capabilities have been validated through experiments. The proposed design is simple and cost-effective to fabricate. We believe HumanFT can enhance humanoid robots' perception by capturing and interpreting multimodal tactile information.
Encountered-Type Haptic Display via Tracking Calibrated Robot
Sep 28, 2023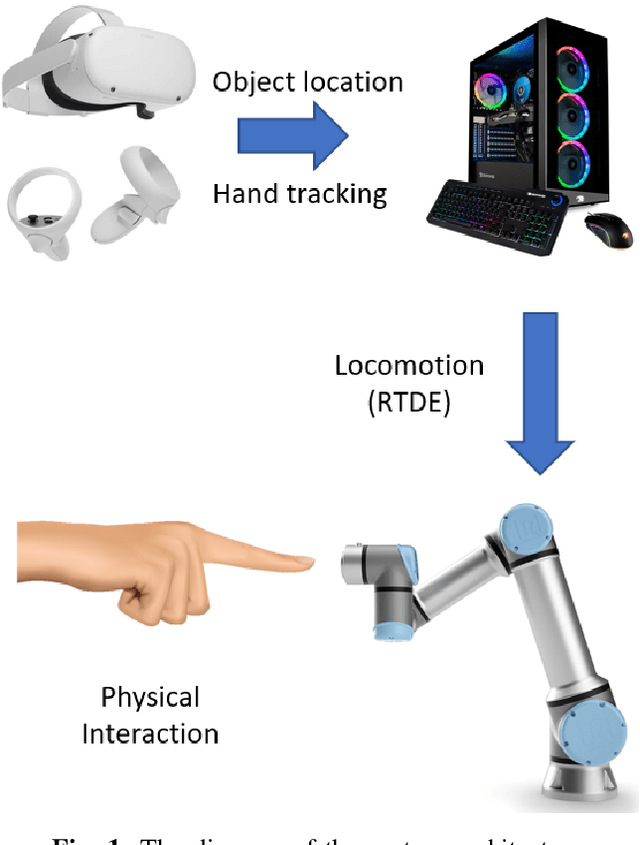

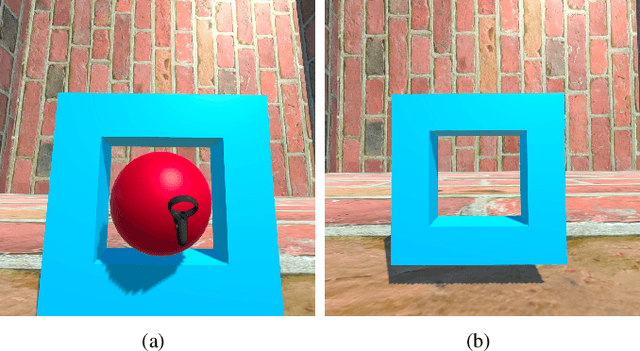
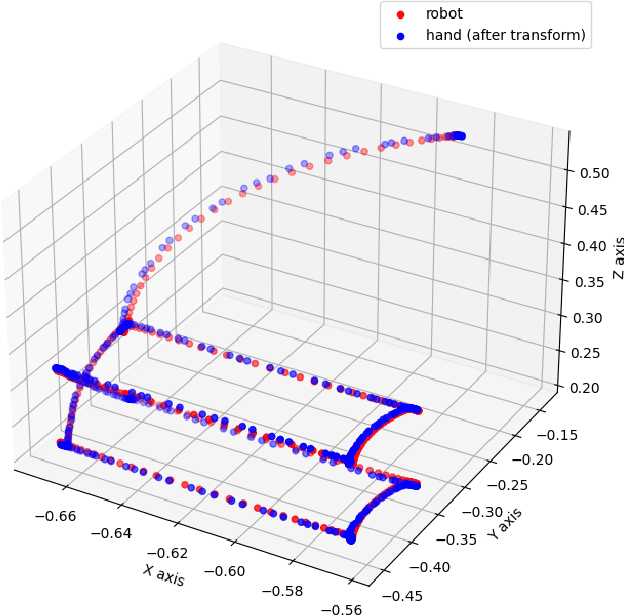
In the past decades, a variety of haptic devices have been developed to facilitate high-fidelity human-computer interaction (HCI) in virtual reality (VR). In particular, passive haptic feedback can create a compelling sensation based on real objects spatially overlapping with their virtual counterparts. However, these approaches require pre-deployment efforts, hindering their democratizing use in practice. We propose the Tracking Calibrated Robot (TCR), a novel and general haptic approach to free developers from deployment efforts, which can be potentially deployed in any scenario. Specifically, we augment the VR with a collaborative robot that renders haptic contact in the real world while the user touches a virtual object in the virtual world. The distance between the user's finger and the robot end-effector is controlled over time. The distance starts to smoothly reduce to zero when the user intends to touch the virtual object. A mock user study tested users' perception of three virtual objects, and the result shows that TCR is effective in terms of conveying discriminative shape information.
Active Multi-Object Exploration and Recognition via Tactile Whiskers
Sep 08, 2021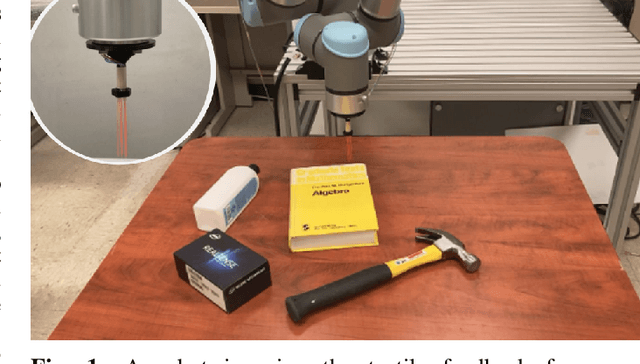
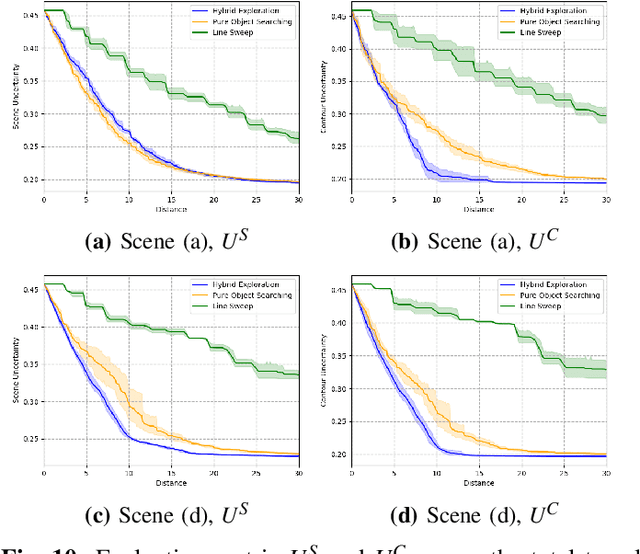
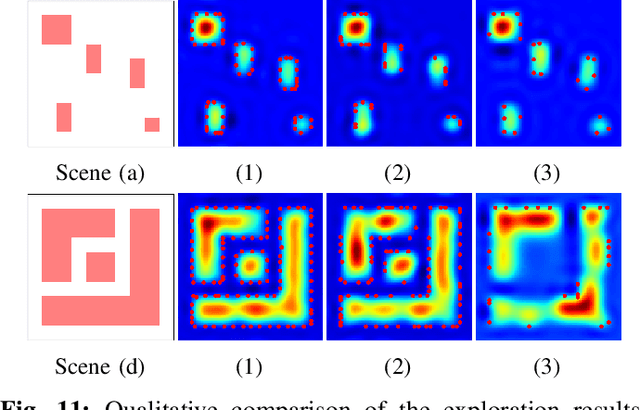
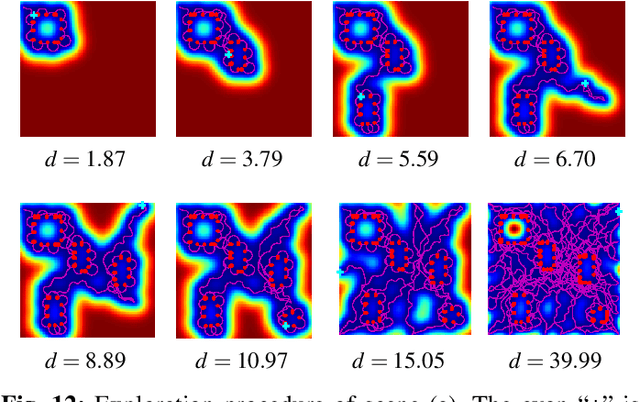
Robotic exploration under uncertain environments is challenging when optical information is not available. In this paper, we propose an autonomous solution of exploring an unknown task space based on tactile sensing alone. We first designed a whisker sensor based on MEMS barometer devices. This sensor can acquire contact information by interacting with the environment non-intrusively. This sensor is accompanied by a planning technique to generate exploration trajectories by using mere tactile perception. This technique relies on a hybrid policy for tactile exploration, which includes a proactive informative path planner for object searching, and a reactive Hopf oscillator for contour tracing. Results indicate that the hybrid exploration policy can increase the efficiency of object discovery. Last, scene understanding was facilitated by segmenting objects and classification. A classifier was developed to recognize the object categories based on the geometric features collected by the whisker sensor. Such an approach demonstrates the whisker sensor, together with the tactile intelligence, can provide sufficiently discriminative features to distinguish objects.
Flying Through a Narrow Gap Using End-to-end Deep Reinforcement Learning Augmented with Curriculum Learning and Sim2Real
Aug 29, 2021
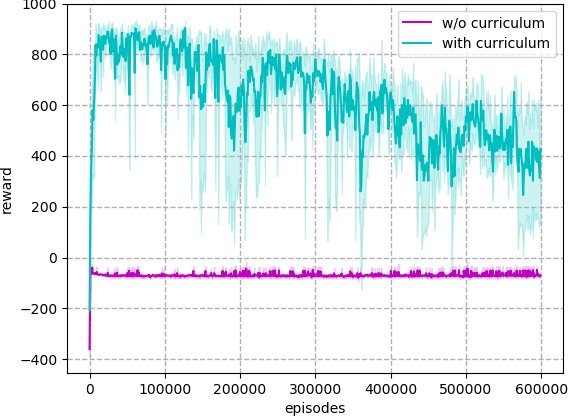
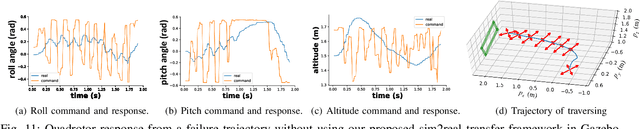
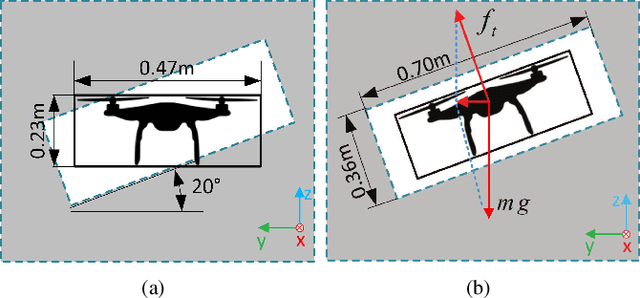
Traversing through a tilted narrow gap is previously an intractable task for reinforcement learning mainly due to two challenges. First, searching feasible trajectories is not trivial because the goal behind the gap is difficult to reach. Second, the error tolerance after Sim2Real is low due to the relatively high speed in comparison to the gap's narrow dimensions. This problem is aggravated by the intractability of collecting real-world data due to the risk of collision damage. In this paper, we propose an end-to-end reinforcement learning framework that solves this task successfully by addressing both problems. To search for dynamically feasible flight trajectories, we use curriculum learning to guide the agent towards the sparse reward behind the obstacle. To tackle the Sim2Real problem, we propose a Sim2Real framework that can transfer control commands to a real quadrotor without using real flight data. To the best of our knowledge, our paper is the first work that accomplishes successful gap traversing task purely using deep reinforcement learning.