 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEncountered-Type Haptic Display via Tracking Calibrated Robot
Paper and Code
Sep 28, 2023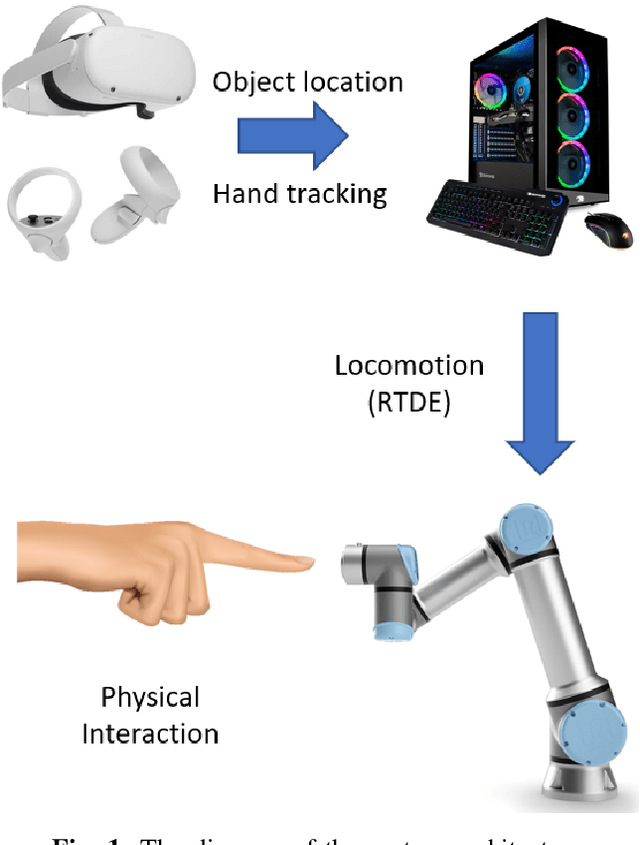

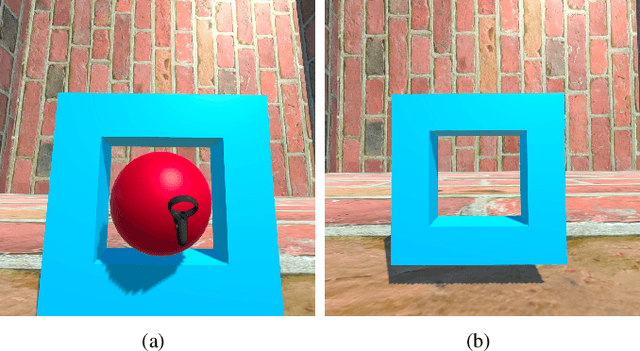
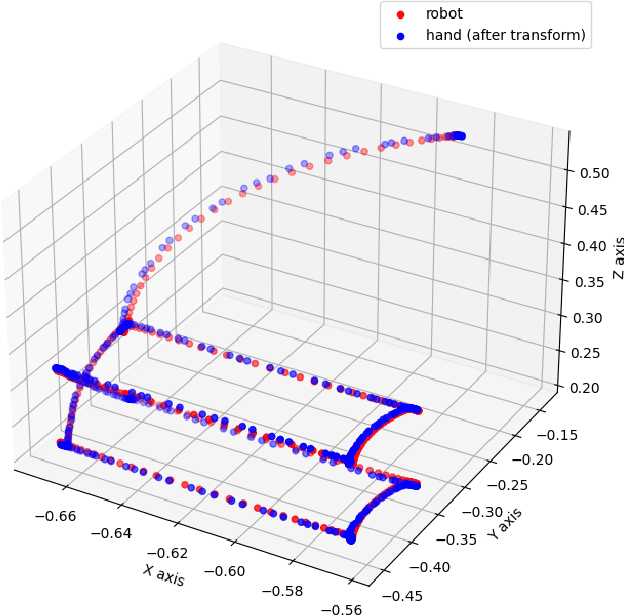
In the past decades, a variety of haptic devices have been developed to facilitate high-fidelity human-computer interaction (HCI) in virtual reality (VR). In particular, passive haptic feedback can create a compelling sensation based on real objects spatially overlapping with their virtual counterparts. However, these approaches require pre-deployment efforts, hindering their democratizing use in practice. We propose the Tracking Calibrated Robot (TCR), a novel and general haptic approach to free developers from deployment efforts, which can be potentially deployed in any scenario. Specifically, we augment the VR with a collaborative robot that renders haptic contact in the real world while the user touches a virtual object in the virtual world. The distance between the user's finger and the robot end-effector is controlled over time. The distance starts to smoothly reduce to zero when the user intends to touch the virtual object. A mock user study tested users' perception of three virtual objects, and the result shows that TCR is effective in terms of conveying discriminative shape information.