 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanFT: A Human-like Fingertip Multimodal Visuo-Tactile Sensor
Paper and Code
Oct 14, 2024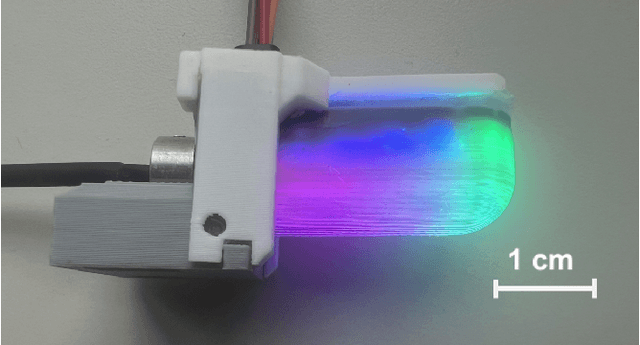
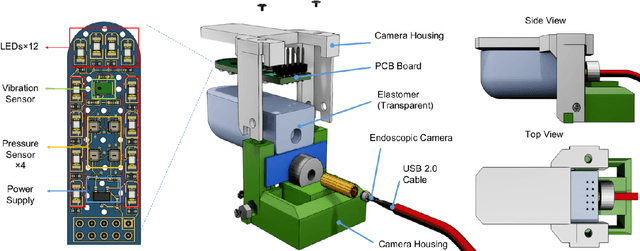
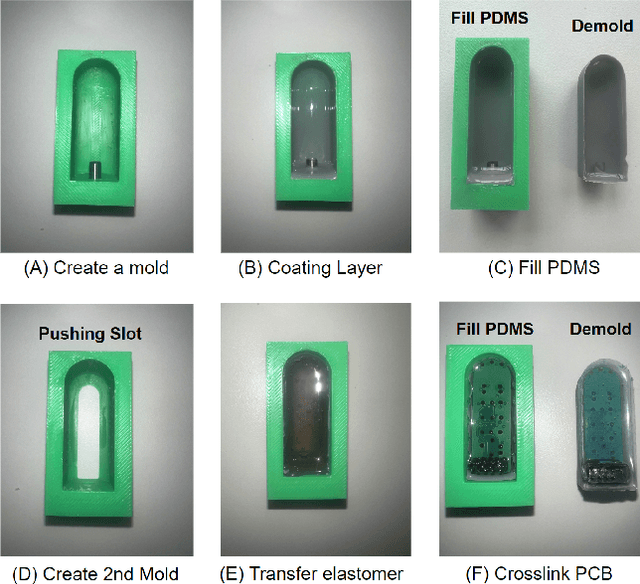
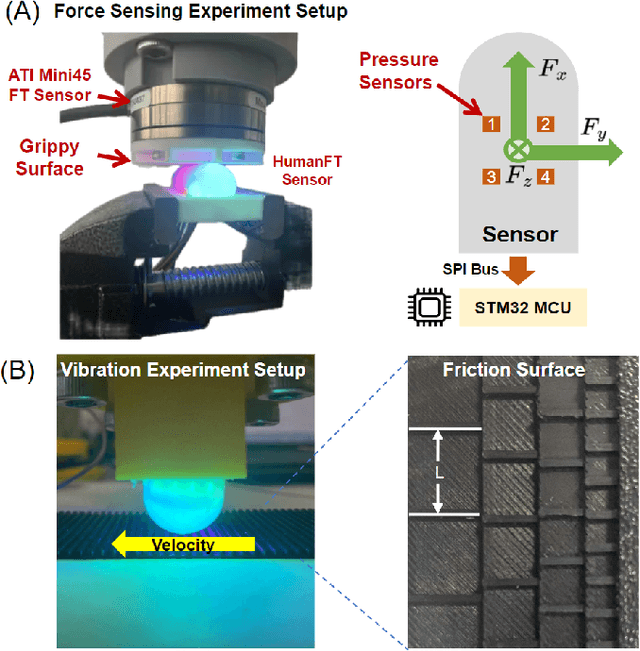
Tactile sensors play a crucial role in enabling robots to interact effectively and safely with objects in everyday tasks. In particular, visuotactile sensors have seen increasing usage in two and three-fingered grippers due to their high-quality feedback. However, a significant gap remains in the development of sensors suitable for humanoid robots, especially five-fingered dexterous hands. One reason is because of the challenges in designing and manufacturing sensors that are compact in size. In this paper, we propose HumanFT, a multimodal visuotactile sensor that replicates the shape and functionality of a human fingertip. To bridge the gap between human and robotic tactile sensing, our sensor features real-time force measurements, high-frequency vibration detection, and overtemperature alerts. To achieve this, we developed a suite of fabrication techniques for a new type of elastomer optimized for force propagation and temperature sensing. Besides, our sensor integrates circuits capable of sensing pressure and vibration. These capabilities have been validated through experiments. The proposed design is simple and cost-effective to fabricate. We believe HumanFT can enhance humanoid robots' perception by capturing and interpreting multimodal tactile information.