 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics Informed Constrained Learning of Dynamics from Static Data
Apr 22, 2025



A physics-informed neural network (PINN) models the dynamics of a system by integrating the governing physical laws into the architecture of a neural network. By enforcing physical laws as constraints, PINN overcomes challenges with data scarsity and potentially high dimensionality. Existing PINN frameworks rely on fully observed time-course data, the acquisition of which could be prohibitive for many systems. In this study, we developed a new PINN learning paradigm, namely Constrained Learning, that enables the approximation of first-order derivatives or motions using non-time course or partially observed data. Computational principles and a general mathematical formulation of Constrained Learning were developed. We further introduced MPOCtrL (Message Passing Optimization-based Constrained Learning) an optimization approach tailored for the Constrained Learning framework that strives to balance the fitting of physical models and observed data. Its code is available at github link: https://github.com/ptdang1001/MPOCtrL Experiments on synthetic and real-world data demonstrated that MPOCtrL can effectively detect the nonlinear dependency between observed data and the underlying physical properties of the system. In particular, on the task of metabolic flux analysis, MPOCtrL outperforms all existing data-driven flux estimators.
Active Multi-Object Exploration and Recognition via Tactile Whiskers
Sep 08, 2021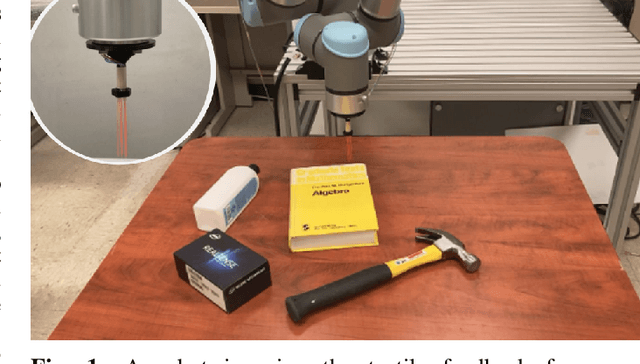
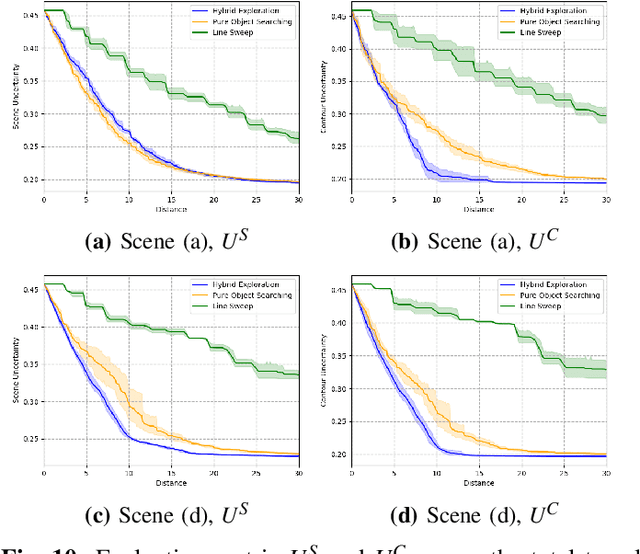
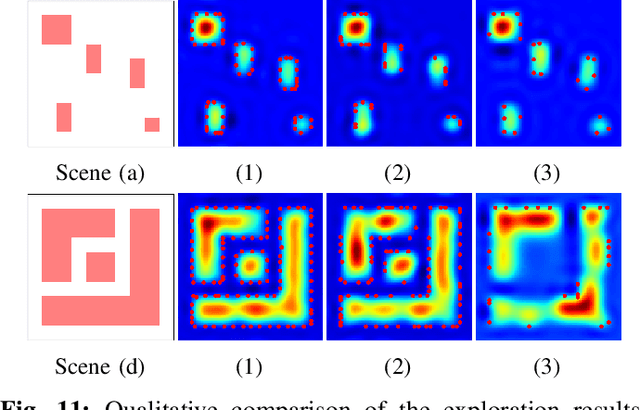
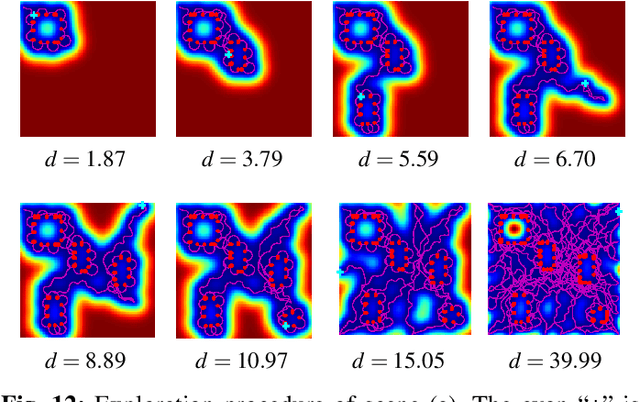
Robotic exploration under uncertain environments is challenging when optical information is not available. In this paper, we propose an autonomous solution of exploring an unknown task space based on tactile sensing alone. We first designed a whisker sensor based on MEMS barometer devices. This sensor can acquire contact information by interacting with the environment non-intrusively. This sensor is accompanied by a planning technique to generate exploration trajectories by using mere tactile perception. This technique relies on a hybrid policy for tactile exploration, which includes a proactive informative path planner for object searching, and a reactive Hopf oscillator for contour tracing. Results indicate that the hybrid exploration policy can increase the efficiency of object discovery. Last, scene understanding was facilitated by segmenting objects and classification. A classifier was developed to recognize the object categories based on the geometric features collected by the whisker sensor. Such an approach demonstrates the whisker sensor, together with the tactile intelligence, can provide sufficiently discriminative features to distinguish objects.