 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Estimation in Unknown Nonlinear Manifold Using Koopman Operator Theory
Dec 09, 2023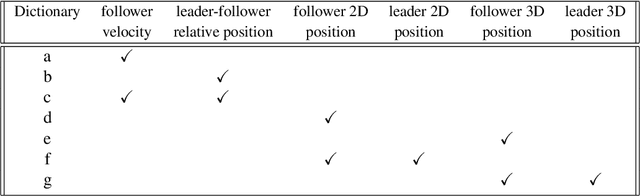
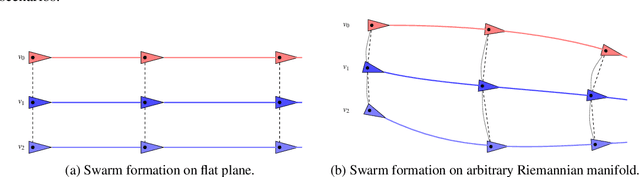
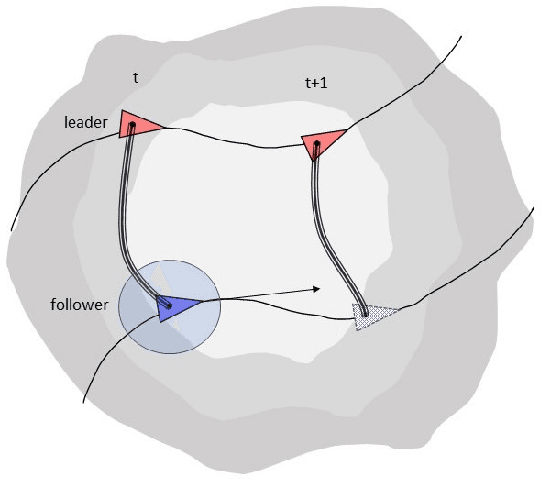
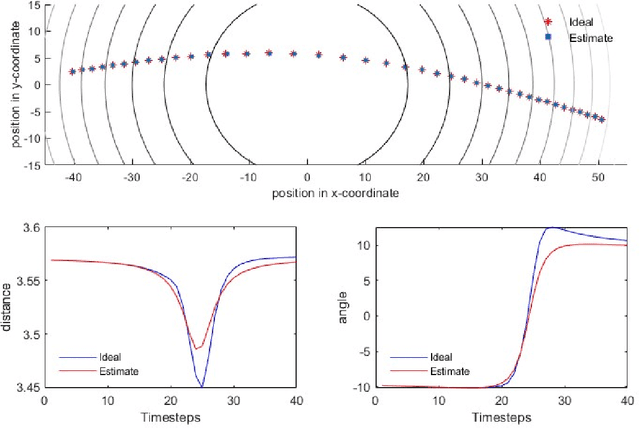
Formation coordination is a critical aspect of swarm robotics, which involves coordinating the motion and behavior of a group of robots to achieve a specific objective. In formation coordination, the robots must maintain a specific spatial arrangement while in motion. In this paper, we present a leader-follower column formation coordination problem in an unknown, two-dimensional nonlinear manifold, where we redefining it as a trajectory estimation problem. Leveraging Koopman operator theory and Extended Dynamic Mode Decomposition, we estimate the measurement vectors for the follower agent and guide its nonlinear trajectories.
Realization of Lattice Formation in Nonlinear Two-dimensional Potential by Mobile Robots
May 09, 2022

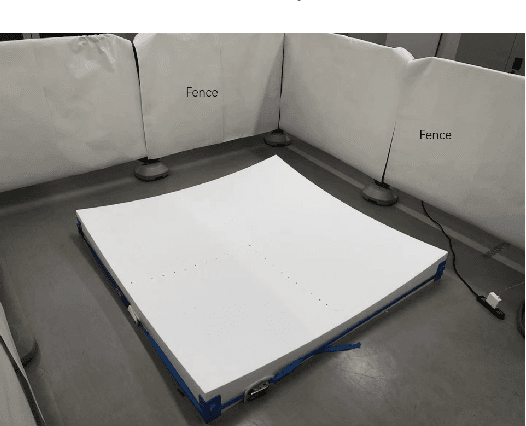
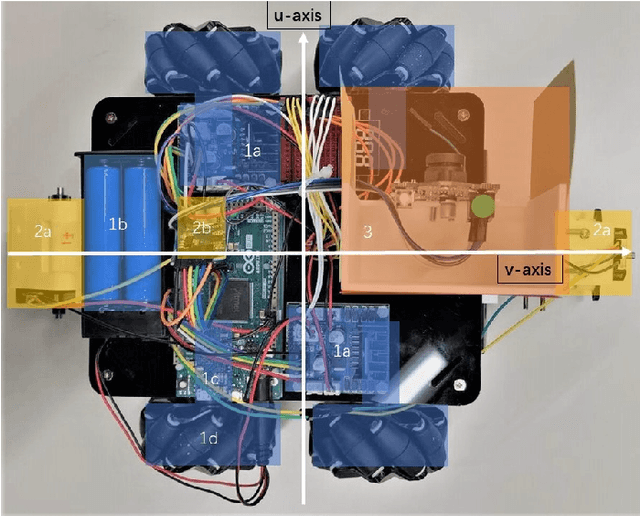
Formation control in multi-agent system has earned significant research interests in both theorical aspect and applications over the past two decades. However, the study on how the external environment shapes swarm formation dynamics, and the design of formation control algorithm for multi-agent system in nonlinear external potential have not been rigorously investigated. In this paper, we present a formation control algorithm for mobile robots travelling in nonlinear external potential. Experiments are performed on real mobile robots to verify the algorithm, and the effectiveness of Dynamic Mode Decomposition in robot's velocity prediction in unknown environment is demonstrated.