Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Estimation in Unknown Nonlinear Manifold Using Koopman Operator Theory
Paper and Code
Dec 09, 2023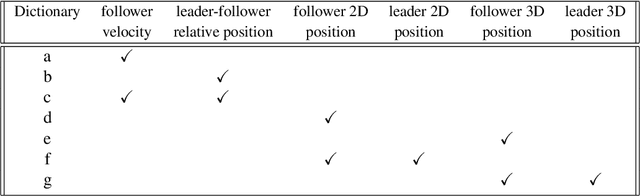
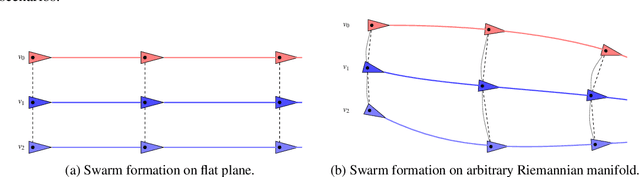
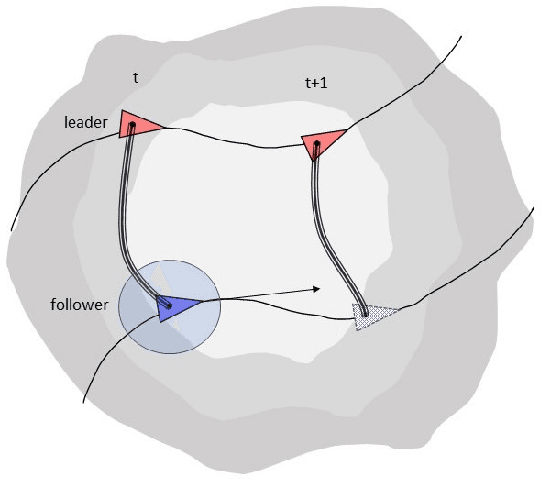
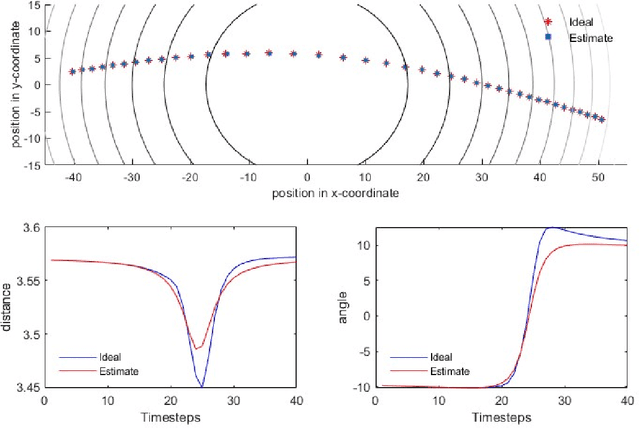
Formation coordination is a critical aspect of swarm robotics, which involves coordinating the motion and behavior of a group of robots to achieve a specific objective. In formation coordination, the robots must maintain a specific spatial arrangement while in motion. In this paper, we present a leader-follower column formation coordination problem in an unknown, two-dimensional nonlinear manifold, where we redefining it as a trajectory estimation problem. Leveraging Koopman operator theory and Extended Dynamic Mode Decomposition, we estimate the measurement vectors for the follower agent and guide its nonlinear trajectories.
View paper on