 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Probabilistic Planning for the Uncertain and Dynamic Orienteering Problem
Sep 09, 2024



The Orienteering Problem (OP) is a well-studied routing problem that has been extended to incorporate uncertainties, reflecting stochastic or dynamic travel costs, prize-collection costs, and prizes. Existing approaches may, however, be inefficient in real-world applications due to insufficient modeling knowledge and initially unknowable parameters in online scenarios. Thus, we propose the Uncertain and Dynamic Orienteering Problem (UDOP), modeling travel costs as distributions with unknown and time-variant parameters. UDOP also associates uncertain travel costs with dynamic prizes and prize-collection costs for its objective and budget constraints. To address UDOP, we develop an ADaptive Approach for Probabilistic paThs - ADAPT, that iteratively performs 'execution' and 'online planning' based on an initial 'offline' solution. The execution phase updates system status and records online cost observations. The online planner employs a Bayesian approach to adaptively estimate power consumption and optimize path sequence based on safety beliefs. We evaluate ADAPT in a practical Unmanned Aerial Vehicle (UAV) charging scheduling problem for Wireless Rechargeable Sensor Networks. The UAV must optimize its path to recharge sensor nodes efficiently while managing its energy under uncertain conditions. ADAPT maintains comparable solution quality and computation time while offering superior robustness. Extensive simulations show that ADAPT achieves a 100% Mission Success Rate (MSR) across all tested scenarios, outperforming comparable heuristic-based and frequentist approaches that fail up to 70% (under challenging conditions) and averaging 67% MSR, respectively. This work advances the field of OP with uncertainties, offering a reliable and efficient approach for real-world applications in uncertain and dynamic environments.
On Solving Close Enough Orienteering Problem with Overlapped Neighborhoods
Oct 06, 2023The Close Enough Traveling Salesman Problem (CETSP) is a well-known variant of the classic Traveling Salesman Problem whereby the agent may complete its mission at any point within a target neighborhood. Heuristics based on overlapped neighborhoods, known as Steiner Zones (SZ), have gained attention in addressing CETSPs. While SZs offer effective approximations to the original graph, their inherent overlap imposes constraints on the search space, potentially conflicting with global optimization objectives. Here we present the Close Enough Orienteering Problem with Non-uniform Neighborhoods (CEOP-N), which extends CETSP by introducing variable prize attributes and non-uniform cost considerations for prize collection. To tackle CEOP-N, we develop a new approach featuring a Randomized Steiner Zone Discretization (RSZD) scheme coupled with a hybrid algorithm based on Particle Swarm Optimization (PSO) and Ant Colony System (ACS) - CRaSZe-AntS. The RSZD scheme identifies sub-regions for PSO exploration, and ACS determines the discrete visiting sequence. We evaluate the RSZD's discretization performance on CEOP instances derived from established CETSP instances, and compare CRaSZe-AntS against the most relevant state-of-the-art heuristic focused on single-neighborhood optimization for CEOP. We also compare the performance of the interior search within SZs and the boundary search on individual neighborhoods in the context of CEOP-N. Our results show CRaSZe-AntS can yield comparable solution quality with significantly reduced computation time compared to the single-neighborhood strategy, where we observe an averaged 140.44% increase in prize collection and 55.18% reduction of execution time. CRaSZe-AntS is thus highly effective in solving emerging CEOP-N, examples of which include truck-and-drone delivery scenarios.
QuaDUE-CCM: Interpretable Distributional Reinforcement Learning using Uncertain Contraction Metrics for Precise Quadrotor Trajectory Tracking
Jul 15, 2022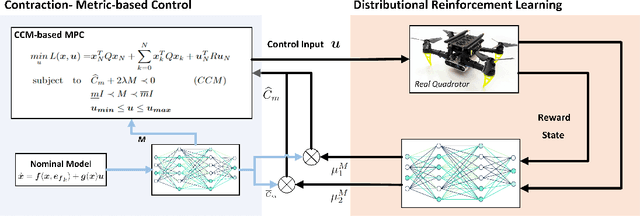
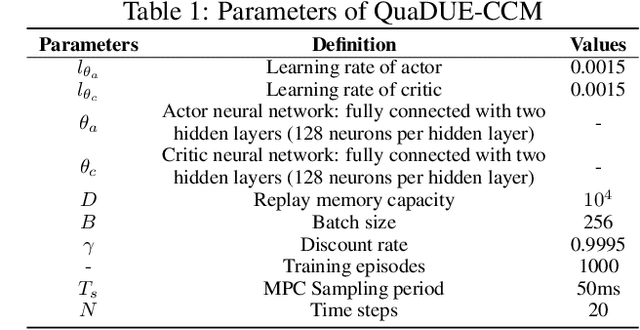
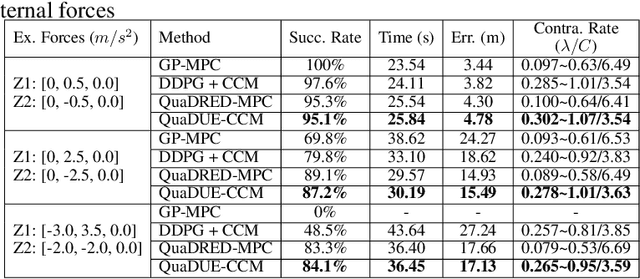
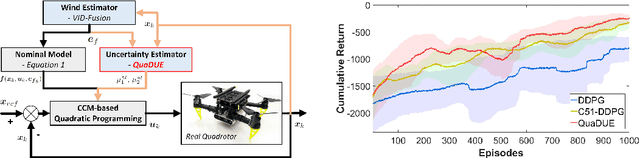
Accuracy and stability are common requirements for Quadrotor trajectory tracking systems. Designing an accurate and stable tracking controller remains challenging, particularly in unknown and dynamic environments with complex aerodynamic disturbances. We propose a Quantile-approximation-based Distributional-reinforced Uncertainty Estimator (QuaDUE) to accurately identify the effects of aerodynamic disturbances, i.e., the uncertainties between the true and estimated Control Contraction Metrics (CCMs). Taking inspiration from contraction theory and integrating the QuaDUE for uncertainties, our novel CCM-based trajectory tracking framework tracks any feasible reference trajectory precisely whilst guaranteeing exponential convergence. More importantly, the convergence and training acceleration of the distributional RL are guaranteed and analyzed, respectively, from theoretical perspectives. We also demonstrate our system under unknown and diverse aerodynamic forces. Under large aerodynamic forces (>2m/s^2), compared with the classic data-driven approach, our QuaDUE-CCM achieves at least a 56.6% improvement in tracking error. Compared with QuaDRED-MPC, a distributional RL-based approach, QuaDUE-CCM achieves at least a 3 times improvement in contraction rate.
Interpretable Stochastic Model Predictive Control using Distributional Reinforced Estimation for Quadrotor Tracking Systems
May 14, 2022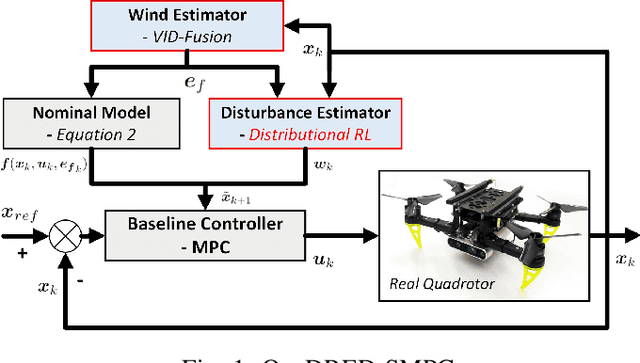
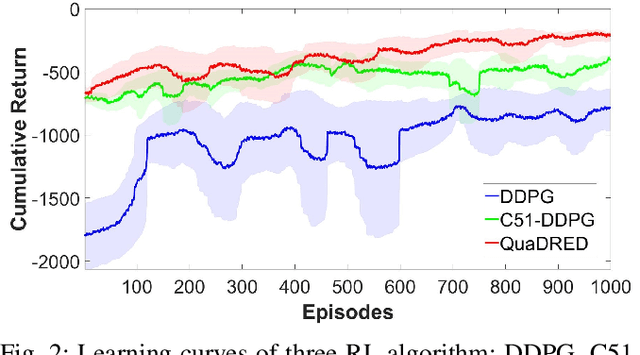
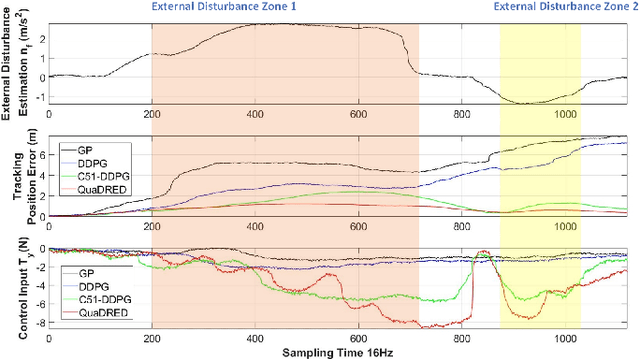
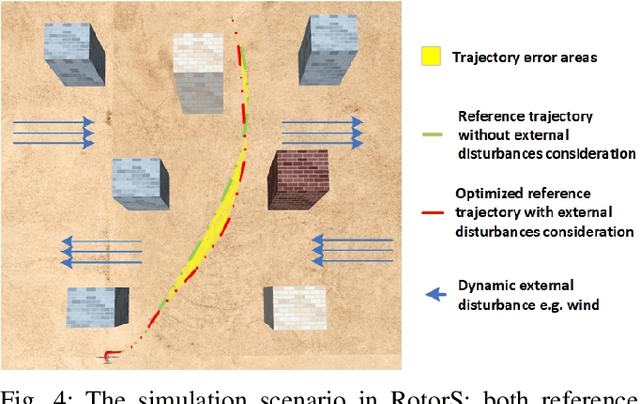
This paper presents a novel trajectory tracker for autonomous quadrotor navigation in dynamic and complex environments. The proposed framework integrates a distributional Reinforcement Learning (RL) estimator for unknown aerodynamic effects into a Stochastic Model Predictive Controller (SMPC) for trajectory tracking. Aerodynamic effects derived from drag forces and moment variations are difficult to model directly and accurately. Most current quadrotor tracking systems therefore treat them as simple `disturbances' in conventional control approaches. We propose Quantile-approximation-based Distributional Reinforced-disturbance-estimator, an aerodynamic disturbance estimator, to accurately identify disturbances, i.e., uncertainties between the true and estimated values of aerodynamic effects. Simplified Affine Disturbance Feedback is employed for control parameterization to guarantee convexity, which we then integrate with a SMPC to achieve sufficient and non-conservative control signals. We demonstrate our system to improve the cumulative tracking errors by at least 66% with unknown and diverse aerodynamic forces compared with recent state-of-the-art. Concerning traditional Reinforcement Learning's non-interpretability, we provide convergence and stability guarantees of Distributional RL and SMPC, respectively, with non-zero mean disturbances.
KinoJGM: A framework for efficient and accurate quadrotor trajectory generation and tracking in dynamic environments
Mar 12, 2022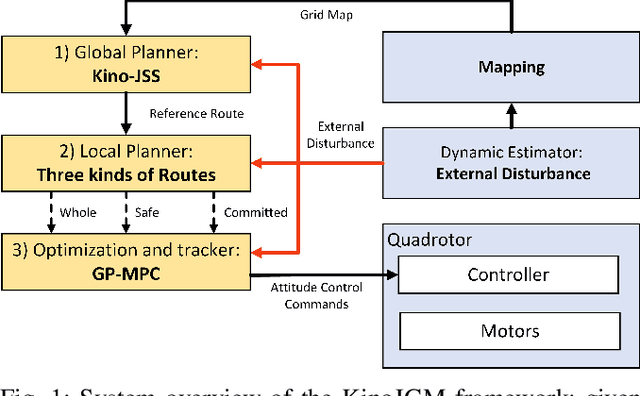
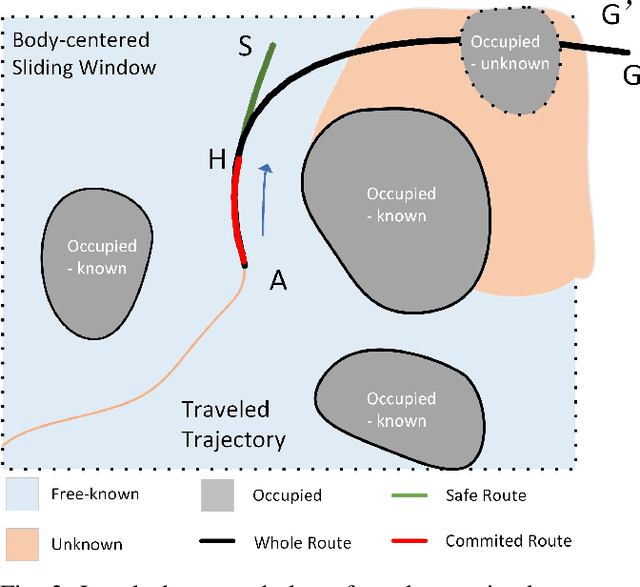
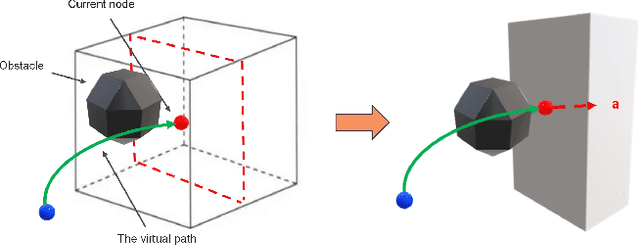
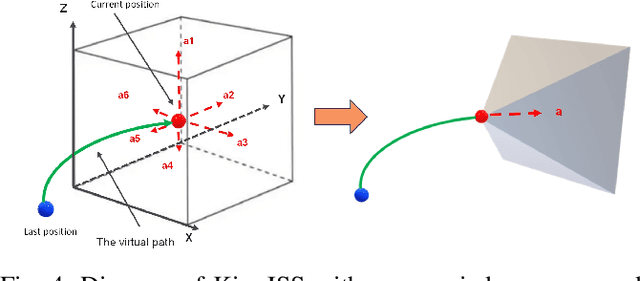
Unmapped areas and aerodynamic disturbances render autonomous navigation with quadrotors extremely challenging. To fly safely and efficiently, trajectory planners and trackers must be able to navigate unknown environments with unpredictable aerodynamic effects in real-time. When encountering aerodynamic effects such as strong winds, most current approaches to quadrotor trajectory planning and tracking will not attempt to deviate from a determined plan, even if it is risky, in the hope that any aerodynamic disturbances can be resisted by a robust controller. This paper presents a novel systematic trajectory planning and tracking framework for autonomous quadrotors. We propose a Kinodynamic Jump Space Search (Kino-JSS) to generate a safe and efficient route in unknown environments with aerodynamic disturbances. A real-time Gaussian Process is employed to model the effects of aerodynamic disturbances, which we then integrate with a Model Predictive Controller to achieve efficient and accurate trajectory optimization and tracking. We demonstrate our system to improve the efficiency of trajectory generation in unknown environments by up to 75\% in the cases tested, compared with recent state-of-the-art. We also demonstrate that our system improves the accuracy of tracking in selected environments with unpredictable aerodynamic effects.
Practical Mission Planning for Optimized UAV-Sensor Wireless Recharging
Mar 09, 2022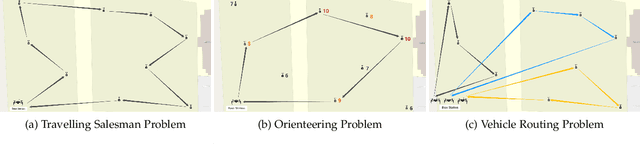
Recharging Internet of Things devices using autonomous robots is an attractive maintenance solution. Ensuring efficient and reliable performance of autonomous power delivery vehicles is very challenging in dynamic environments. Our work considers a hybrid Travelling Salesman Problem and Orienteering Problem scenario where the optimization objective is to jointly minimize discharged energy of the power delivery vehicle and maximize recharged energy of devices. This is decomposed as an NP-hard nonconvex optimization and nonlinear integer programming problem. Many studies have demonstrated satisfactory performance of heuristic algorithms' ability to solve specific routing problems, however very few studies explore online updating (i.e., mission re-planning `on the fly') for such hybrid scenarios. In this paper, we present a novel lightweight and reliable mission planner that solves the problem by combining offline search and online reevaluation. We propose Rapid Online Metaheuristic-based Planner, ROMP, a multi-objective offline and online mission planner that can incorporate real-time state information from the power delivery vehicle and its local environment to deliver reliable, up-to-date and near-optimal mission planning. We supplement Guided Local Search (via Google OR-Tools) with a Black Hole-inspired algorithm. Our results show that the proposed solver improves the solution quality offered by Guided Local Search in most of the cases tested. We also demonstrate latency performance improvements by applying a parallelization strategy.