 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Better Optimization For Listwise Preference in Diffusion Models
Oct 02, 2025



Reinforcement learning from human feedback (RLHF) has proven effectiveness for aligning text-to-image (T2I) diffusion models with human preferences. Although Direct Preference Optimization (DPO) is widely adopted for its computational efficiency and avoidance of explicit reward modeling, its applications to diffusion models have primarily relied on pairwise preferences. The precise optimization of listwise preferences remains largely unaddressed. In practice, human feedback on image preferences often contains implicit ranked information, which conveys more precise human preferences than pairwise comparisons. In this work, we propose Diffusion-LPO, a simple and effective framework for Listwise Preference Optimization in diffusion models with listwise data. Given a caption, we aggregate user feedback into a ranked list of images and derive a listwise extension of the DPO objective under the Plackett-Luce model. Diffusion-LPO enforces consistency across the entire ranking by encouraging each sample to be preferred over all of its lower-ranked alternatives. We empirically demonstrate the effectiveness of Diffusion-LPO across various tasks, including text-to-image generation, image editing, and personalized preference alignment. Diffusion-LPO consistently outperforms pairwise DPO baselines on visual quality and preference alignment.
Development of a Simple and Novel Digital Twin Framework for Industrial Robots in Intelligent robotics manufacturing
Oct 19, 2024



This paper has proposed an easily replicable and novel approach for developing a Digital Twin (DT) system for industrial robots in intelligent manufacturing applications. Our framework enables effective communication via Robot Web Service (RWS), while a real-time simulation is implemented in Unity 3D and Web-based Platform without any other 3rd party tools. The framework can do real-time visualization and control of the entire work process, as well as implement real-time path planning based on algorithms executed in MATLAB. Results verify the high communication efficiency with a refresh rate of only $17 ms$. Furthermore, our developed web-based platform and Graphical User Interface (GUI) enable easy accessibility and user-friendliness in real-time control.
Improving the Language Understanding Capabilities of Large Language Models Using Reinforcement Learning
Oct 14, 2024Large language models (LLMs), built on decoder-only transformers, excel in natural language generation and adapt to diverse tasks using zero-shot and few-shot prompting. However, these prompting methods often struggle on natural language understanding (NLU) tasks, where encoder-only models like BERT-base outperform LLMs on benchmarks like GLUE and SuperGLUE. This paper explores two approaches-supervised fine-tuning (SFT) and proximal policy optimization (PPO)-to enhance LLMs' NLU abilities. To reduce the cost of full-model fine-tuning, we integrate low-rank adaptation (LoRA) layers, limiting updates to these layers during both SFT and PPO. In SFT, task-specific prompts are concatenated with input queries and ground-truth labels, optimizing with next-token prediction. Despite this, LLMs still underperform compared to models like BERT-base on several NLU tasks. To close this gap, we apply PPO, a reinforcement learning technique that treats each token generation as an action and uses a reward function based on alignment with ground-truth answers. PPO then updates the model to maximize these rewards, aligning outputs with correct labels. Our experiments with LLAMA2-7B show that PPO improves performance, with a 6.3-point gain over SFT on GLUE. PPO exceeds zero-shot by 38.7 points and few-shot by 26.1 points on GLUE, while surpassing these by 28.8 and 28.5 points on SuperGLUE. Additionally, PPO outperforms BERT-large by 2.7 points on GLUE and 9.3 points on SuperGLUE. The improvements are consistent across models like Qwen2.5-7B and MPT-7B, highlighting PPO's robustness in enhancing LLMs' NLU capabilities.
SparseByteNN: A Novel Mobile Inference Acceleration Framework Based on Fine-Grained Group Sparsity
Oct 30, 2023



To address the challenge of increasing network size, researchers have developed sparse models through network pruning. However, maintaining model accuracy while achieving significant speedups on general computing devices remains an open problem. In this paper, we present a novel mobile inference acceleration framework SparseByteNN, which leverages fine-grained kernel sparsity to achieve real-time execution as well as high accuracy. Our framework consists of two parts: (a) A fine-grained kernel sparsity schema with a sparsity granularity between structured pruning and unstructured pruning. It designs multiple sparse patterns for different operators. Combined with our proposed whole network rearrangement strategy, the schema achieves a high compression rate and high precision at the same time. (b) Inference engine co-optimized with the sparse pattern. The conventional wisdom is that this reduction in theoretical FLOPs does not translate into real-world efficiency gains. We aim to correct this misconception by introducing a family of efficient sparse kernels for ARM and WebAssembly. Equipped with our efficient implementation of sparse primitives, we show that sparse versions of MobileNet-v1 outperform strong dense baselines on the efficiency-accuracy curve. Experimental results on Qualcomm 855 show that for 30% sparse MobileNet-v1, SparseByteNN achieves 1.27x speedup over the dense version and 1.29x speedup over the state-of-the-art sparse inference engine MNN with a slight accuracy drop of 0.224%. The source code of SparseByteNN will be available at https://github.com/lswzjuer/SparseByteNN
AutoDiffusion: Training-Free Optimization of Time Steps and Architectures for Automated Diffusion Model Acceleration
Sep 23, 2023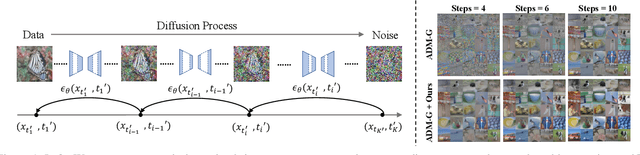
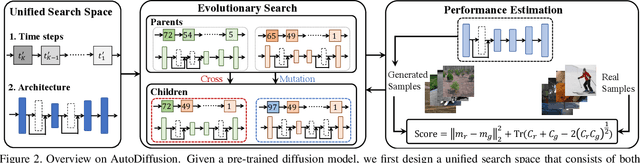
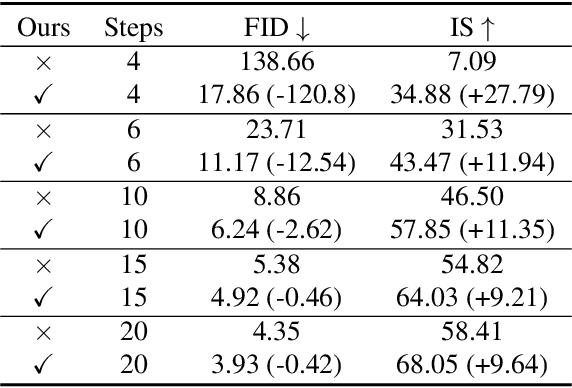
Diffusion models are emerging expressive generative models, in which a large number of time steps (inference steps) are required for a single image generation. To accelerate such tedious process, reducing steps uniformly is considered as an undisputed principle of diffusion models. We consider that such a uniform assumption is not the optimal solution in practice; i.e., we can find different optimal time steps for different models. Therefore, we propose to search the optimal time steps sequence and compressed model architecture in a unified framework to achieve effective image generation for diffusion models without any further training. Specifically, we first design a unified search space that consists of all possible time steps and various architectures. Then, a two stage evolutionary algorithm is introduced to find the optimal solution in the designed search space. To further accelerate the search process, we employ FID score between generated and real samples to estimate the performance of the sampled examples. As a result, the proposed method is (i).training-free, obtaining the optimal time steps and model architecture without any training process; (ii). orthogonal to most advanced diffusion samplers and can be integrated to gain better sample quality. (iii). generalized, where the searched time steps and architectures can be directly applied on different diffusion models with the same guidance scale. Experimental results show that our method achieves excellent performance by using only a few time steps, e.g. 17.86 FID score on ImageNet 64 $\times$ 64 with only four steps, compared to 138.66 with DDIM. The code is available at https://github.com/lilijiangg/AutoDiffusion.
UGC: Unified GAN Compression for Efficient Image-to-Image Translation
Sep 17, 2023



Recent years have witnessed the prevailing progress of Generative Adversarial Networks (GANs) in image-to-image translation. However, the success of these GAN models hinges on ponderous computational costs and labor-expensive training data. Current efficient GAN learning techniques often fall into two orthogonal aspects: i) model slimming via reduced calculation costs; ii)data/label-efficient learning with fewer training data/labels. To combine the best of both worlds, we propose a new learning paradigm, Unified GAN Compression (UGC), with a unified optimization objective to seamlessly prompt the synergy of model-efficient and label-efficient learning. UGC sets up semi-supervised-driven network architecture search and adaptive online semi-supervised distillation stages sequentially, which formulates a heterogeneous mutual learning scheme to obtain an architecture-flexible, label-efficient, and performance-excellent model.
AlignDet: Aligning Pre-training and Fine-tuning in Object Detection
Jul 20, 2023The paradigm of large-scale pre-training followed by downstream fine-tuning has been widely employed in various object detection algorithms. In this paper, we reveal discrepancies in data, model, and task between the pre-training and fine-tuning procedure in existing practices, which implicitly limit the detector's performance, generalization ability, and convergence speed. To this end, we propose AlignDet, a unified pre-training framework that can be adapted to various existing detectors to alleviate the discrepancies. AlignDet decouples the pre-training process into two stages, i.e., image-domain and box-domain pre-training. The image-domain pre-training optimizes the detection backbone to capture holistic visual abstraction, and box-domain pre-training learns instance-level semantics and task-aware concepts to initialize the parts out of the backbone. By incorporating the self-supervised pre-trained backbones, we can pre-train all modules for various detectors in an unsupervised paradigm. As depicted in Figure 1, extensive experiments demonstrate that AlignDet can achieve significant improvements across diverse protocols, such as detection algorithm, model backbone, data setting, and training schedule. For example, AlignDet improves FCOS by 5.3 mAP, RetinaNet by 2.1 mAP, Faster R-CNN by 3.3 mAP, and DETR by 2.3 mAP under fewer epochs.
Channel-Spatial-Based Few-Shot Bird Sound Event Detection
Jun 25, 2023



In this paper, we propose a model for bird sound event detection that focuses on a small number of training samples within the everyday long-tail distribution. As a result, we investigate bird sound detection using the few-shot learning paradigm. By integrating channel and spatial attention mechanisms, improved feature representations can be learned from few-shot training datasets. We develop a Metric Channel-Spatial Network model by incorporating a Channel Spatial Squeeze-Excitation block into the prototype network, combining it with these attention mechanisms. We evaluate the Metric Channel Spatial Network model on the DCASE 2022 Take5 dataset benchmark, achieving an F-measure of 66.84% and a PSDS of 58.98%. Our experiment demonstrates that the combination of channel and spatial attention mechanisms effectively enhances the performance of bird sound classification and detection.
Solving Oscillation Problem in Post-Training Quantization Through a Theoretical Perspective
Apr 04, 2023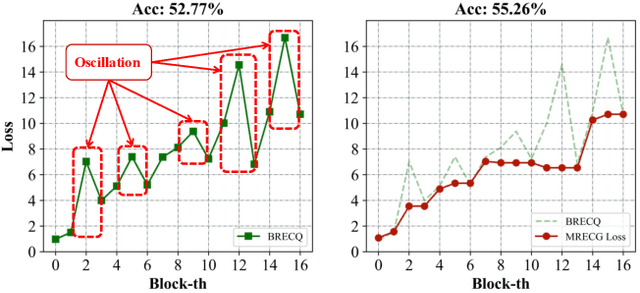
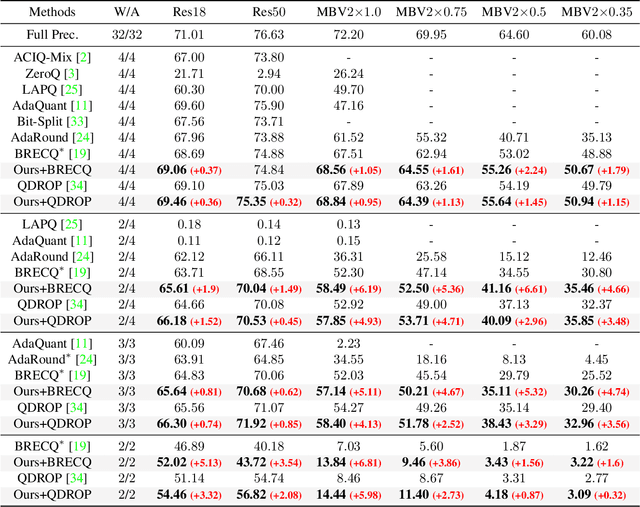
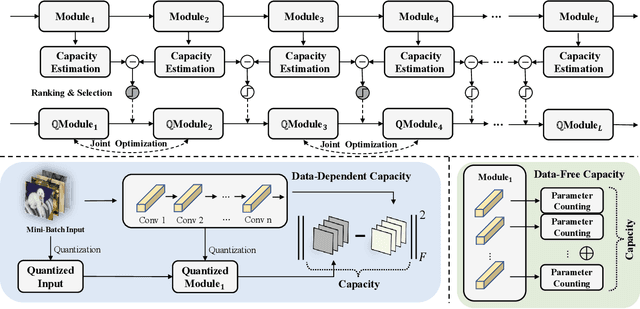
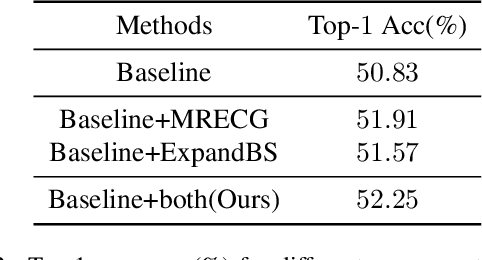
Post-training quantization (PTQ) is widely regarded as one of the most efficient compression methods practically, benefitting from its data privacy and low computation costs. We argue that an overlooked problem of oscillation is in the PTQ methods. In this paper, we take the initiative to explore and present a theoretical proof to explain why such a problem is essential in PTQ. And then, we try to solve this problem by introducing a principled and generalized framework theoretically. In particular, we first formulate the oscillation in PTQ and prove the problem is caused by the difference in module capacity. To this end, we define the module capacity (ModCap) under data-dependent and data-free scenarios, where the differentials between adjacent modules are used to measure the degree of oscillation. The problem is then solved by selecting top-k differentials, in which the corresponding modules are jointly optimized and quantized. Extensive experiments demonstrate that our method successfully reduces the performance drop and is generalized to different neural networks and PTQ methods. For example, with 2/4 bit ResNet-50 quantization, our method surpasses the previous state-of-the-art method by 1.9%. It becomes more significant on small model quantization, e.g. surpasses BRECQ method by 6.61% on MobileNetV2*0.5.
FreeSeg: Unified, Universal and Open-Vocabulary Image Segmentation
Mar 30, 2023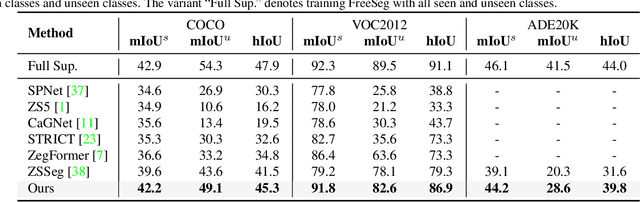
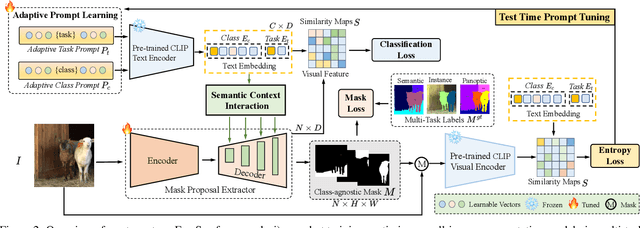
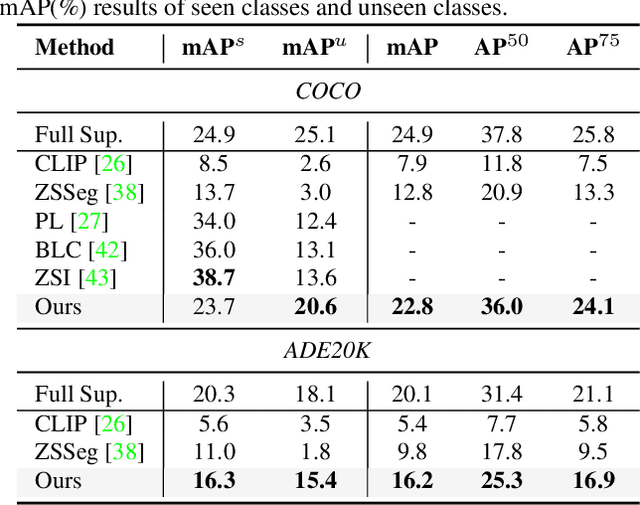
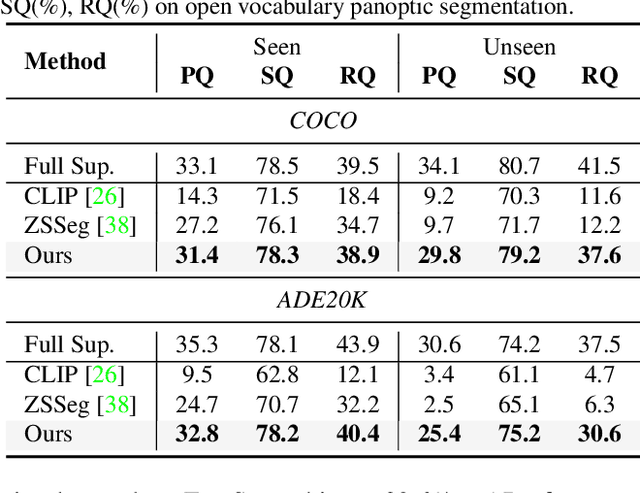
Recently, open-vocabulary learning has emerged to accomplish segmentation for arbitrary categories of text-based descriptions, which popularizes the segmentation system to more general-purpose application scenarios. However, existing methods devote to designing specialized architectures or parameters for specific segmentation tasks. These customized design paradigms lead to fragmentation between various segmentation tasks, thus hindering the uniformity of segmentation models. Hence in this paper, we propose FreeSeg, a generic framework to accomplish Unified, Universal and Open-Vocabulary Image Segmentation. FreeSeg optimizes an all-in-one network via one-shot training and employs the same architecture and parameters to handle diverse segmentation tasks seamlessly in the inference procedure. Additionally, adaptive prompt learning facilitates the unified model to capture task-aware and category-sensitive concepts, improving model robustness in multi-task and varied scenarios. Extensive experimental results demonstrate that FreeSeg establishes new state-of-the-art results in performance and generalization on three segmentation tasks, which outperforms the best task-specific architectures by a large margin: 5.5% mIoU on semantic segmentation, 17.6% mAP on instance segmentation, 20.1% PQ on panoptic segmentation for the unseen class on COCO.