 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolar Open Technical Report
Jan 11, 2026We introduce Solar Open, a 102B-parameter bilingual Mixture-of-Experts language model for underserved languages. Solar Open demonstrates a systematic methodology for building competitive LLMs by addressing three interconnected challenges. First, to train effectively despite data scarcity for underserved languages, we synthesize 4.5T tokens of high-quality, domain-specific, and RL-oriented data. Second, we coordinate this data through a progressive curriculum jointly optimizing composition, quality thresholds, and domain coverage across 20 trillion tokens. Third, to enable reasoning capabilities through scalable RL, we apply our proposed framework SnapPO for efficient optimization. Across benchmarks in English and Korean, Solar Open achieves competitive performance, demonstrating the effectiveness of this methodology for underserved language AI development.
KoTaP: A Panel Dataset for Corporate Tax Avoidance, Performance, and Governance in Korea
Nov 06, 2025This study introduces the Korean Tax Avoidance Panel (KoTaP), a long-term panel dataset of non-financial firms listed on KOSPI and KOSDAQ between 2011 and 2024. After excluding financial firms, firms with non-December fiscal year ends, capital impairment, and negative pre-tax income, the final dataset consists of 12,653 firm-year observations from 1,754 firms. KoTaP is designed to treat corporate tax avoidance as a predictor variable and link it to multiple domains, including earnings management (accrual- and activity-based), profitability (ROA, ROE, CFO, LOSS), stability (LEV, CUR, SIZE, PPE, AGE, INVREC), growth (GRW, MB, TQ), and governance (BIG4, FORN, OWN). Tax avoidance itself is measured using complementary indicators cash effective tax rate (CETR), GAAP effective tax rate (GETR), and book-tax difference measures (TSTA, TSDA) with adjustments to ensure interpretability. A key strength of KoTaP is its balanced panel structure with standardized variables and its consistency with international literature on the distribution and correlation of core indicators. At the same time, it reflects distinctive institutional features of Korean firms, such as concentrated ownership, high foreign shareholding, and elevated liquidity ratios, providing both international comparability and contextual uniqueness. KoTaP enables applications in benchmarking econometric and deep learning models, external validity checks, and explainable AI analyses. It further supports policy evaluation, audit planning, and investment analysis, making it a critical open resource for accounting, finance, and interdisciplinary research.
B-TMS: Bayesian Traversable Terrain Modeling and Segmentation Across 3D LiDAR Scans and Maps for Enhanced Off-Road Navigation
Jun 26, 2024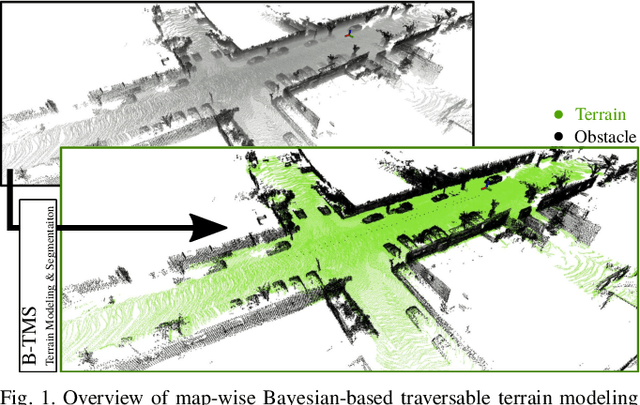

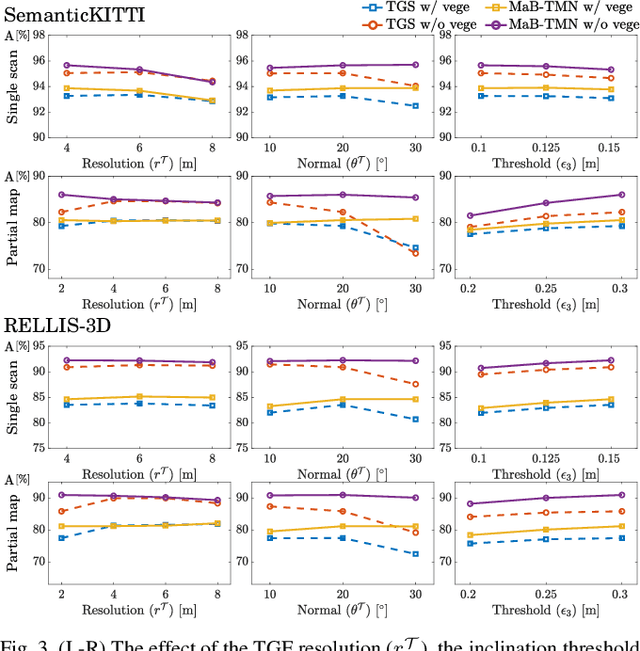
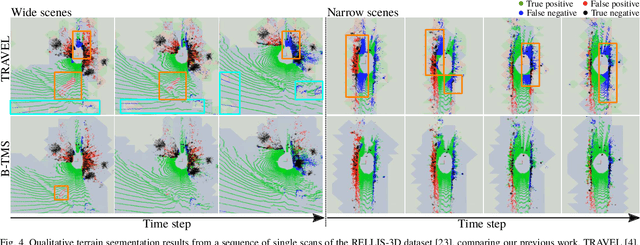
Recognizing traversable terrain from 3D point cloud data is critical, as it directly impacts the performance of autonomous navigation in off-road environments. However, existing segmentation algorithms often struggle with challenges related to changes in data distribution, environmental specificity, and sensor variations. Moreover, when encountering sunken areas, their performance is frequently compromised, and they may even fail to recognize them. To address these challenges, we introduce B-TMS, a novel approach that performs map-wise terrain modeling and segmentation by utilizing Bayesian generalized kernel (BGK) within the graph structure known as the tri-grid field (TGF). Our experiments encompass various data distributions, ranging from single scans to partial maps, utilizing both public datasets representing urban scenes and off-road environments, and our own dataset acquired from extremely bumpy terrains. Our results demonstrate notable contributions, particularly in terms of robustness to data distribution variations, adaptability to diverse environmental conditions, and resilience against the challenges associated with parameter changes.
Galibr: Targetless LiDAR-Camera Extrinsic Calibration Method via Ground Plane Initialization
Jun 14, 2024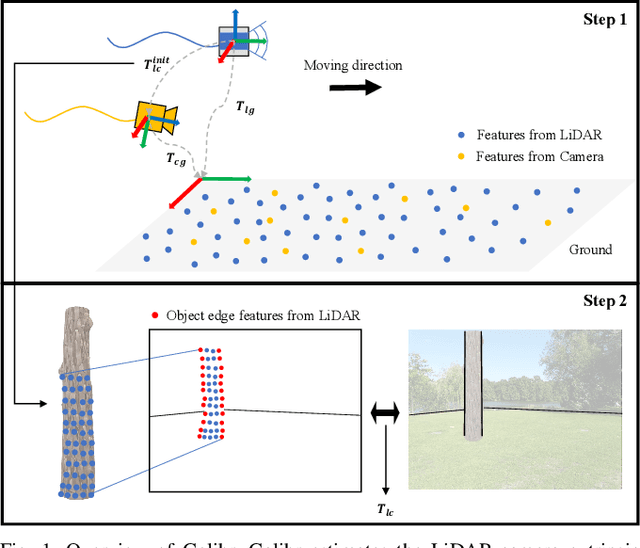
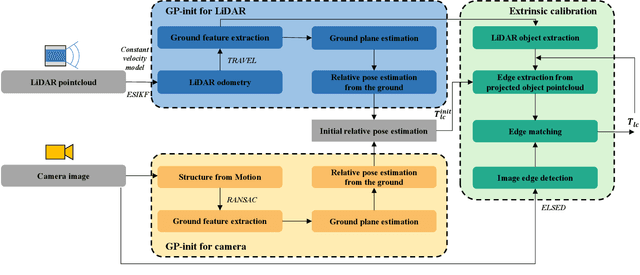
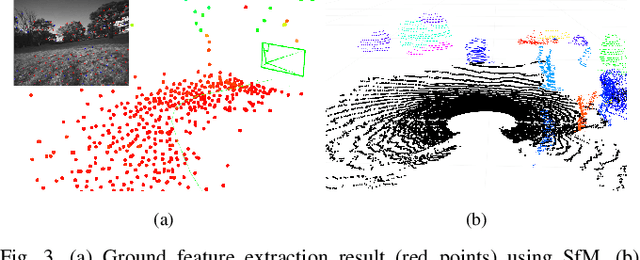
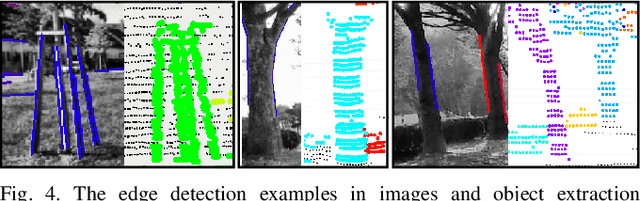
With the rapid development of autonomous driving and SLAM technology, the performance of autonomous systems using multimodal sensors highly relies on accurate extrinsic calibration. Addressing the need for a convenient, maintenance-friendly calibration process in any natural environment, this paper introduces Galibr, a fully automatic targetless LiDAR-camera extrinsic calibration tool designed for ground vehicle platforms in any natural setting. The method utilizes the ground planes and edge information from both LiDAR and camera inputs, streamlining the calibration process. It encompasses two main steps: an initial pose estimation algorithm based on ground planes (GP-init), and a refinement phase through edge extraction and matching. Our approach significantly enhances calibration performance, primarily attributed to our novel initial pose estimation method, as demonstrated in unstructured natural environments, including on the KITTI dataset and the KAIST quadruped dataset.
Evalverse: Unified and Accessible Library for Large Language Model Evaluation
Apr 01, 2024
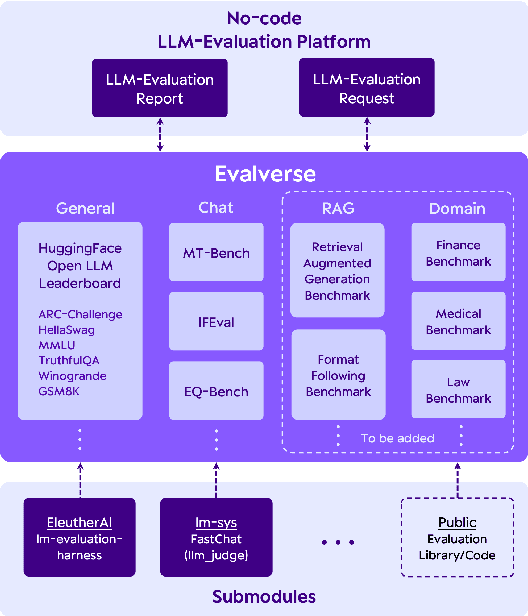
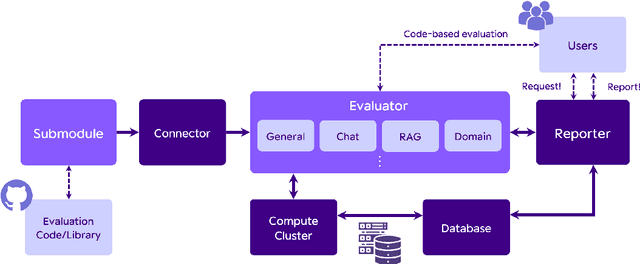
This paper introduces Evalverse, a novel library that streamlines the evaluation of Large Language Models (LLMs) by unifying disparate evaluation tools into a single, user-friendly framework. Evalverse enables individuals with limited knowledge of artificial intelligence to easily request LLM evaluations and receive detailed reports, facilitated by an integration with communication platforms like Slack. Thus, Evalverse serves as a powerful tool for the comprehensive assessment of LLMs, offering both researchers and practitioners a centralized and easily accessible evaluation framework. Finally, we also provide a demo video for Evalverse, showcasing its capabilities and implementation in a two-minute format.
sDPO: Don't Use Your Data All at Once
Mar 28, 2024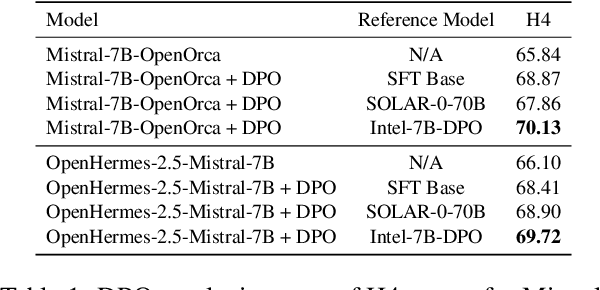
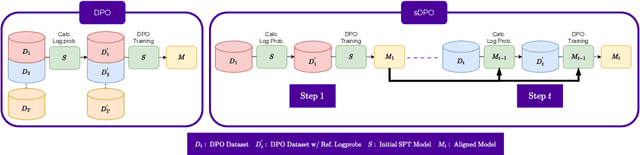
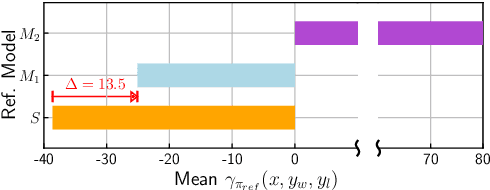
As development of large language models (LLM) progresses, aligning them with human preferences has become increasingly important. We propose stepwise DPO (sDPO), an extension of the recently popularized direct preference optimization (DPO) for alignment tuning. This approach involves dividing the available preference datasets and utilizing them in a stepwise manner, rather than employing it all at once. We demonstrate that this method facilitates the use of more precisely aligned reference models within the DPO training framework. Furthermore, sDPO trains the final model to be more performant, even outperforming other popular LLMs with more parameters.
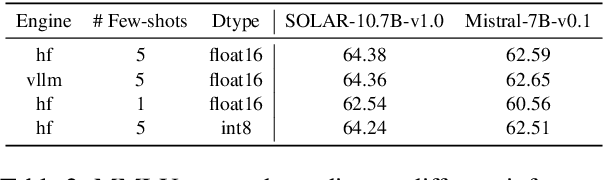
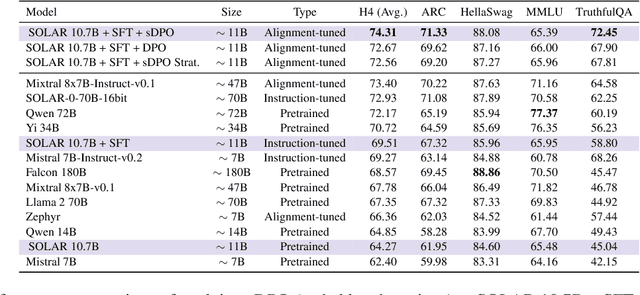
SOLAR 10.7B: Scaling Large Language Models with Simple yet Effective Depth Up-Scaling
Dec 29, 2023



We introduce SOLAR 10.7B, a large language model (LLM) with 10.7 billion parameters, demonstrating superior performance in various natural language processing (NLP) tasks. Inspired by recent efforts to efficiently up-scale LLMs, we present a method for scaling LLMs called depth up-scaling (DUS), which encompasses depthwise scaling and continued pretraining. In contrast to other LLM up-scaling methods that use mixture-of-experts, DUS does not require complex changes to train and inference efficiently. We show experimentally that DUS is simple yet effective in scaling up high-performance LLMs from small ones. Building on the DUS model, we additionally present SOLAR 10.7B-Instruct, a variant fine-tuned for instruction-following capabilities, surpassing Mixtral-8x7B-Instruct. SOLAR 10.7B is publicly available under the Apache 2.0 license, promoting broad access and application in the LLM field.
TRAVEL: Traversable Ground and Above-Ground Object Segmentation Using Graph Representation of 3D LiDAR Scans
Jun 07, 2022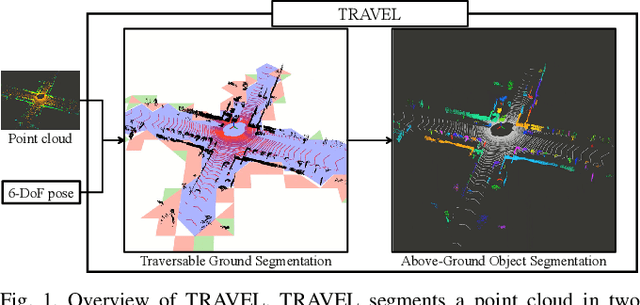
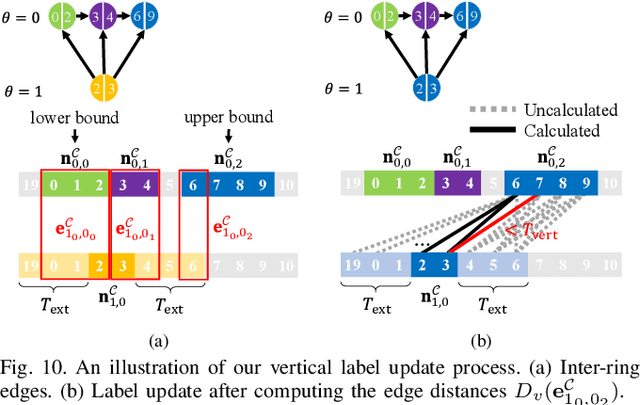
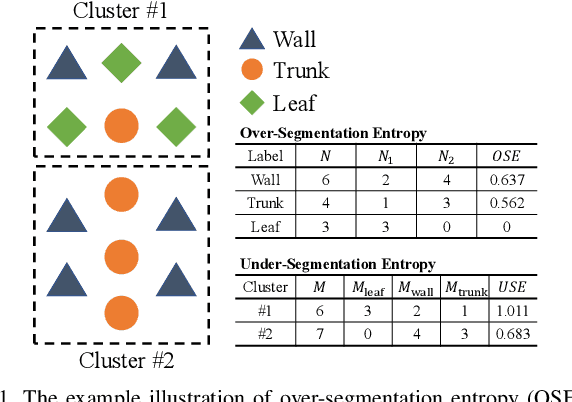
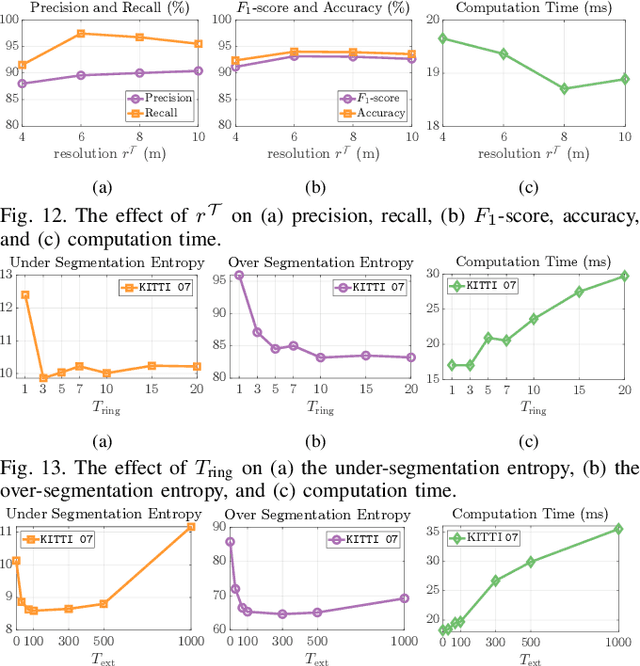
Perception of traversable regions and objects of interest from a 3D point cloud is one of the critical tasks in autonomous navigation. A ground vehicle needs to look for traversable terrains that are explorable by wheels. Then, to make safe navigation decisions, the segmentation of objects positioned on those terrains has to be followed up. However, over-segmentation and under-segmentation can negatively influence such navigation decisions. To that end, we propose TRAVEL, which performs traversable ground detection and object clustering simultaneously using the graph representation of a 3D point cloud. To segment the traversable ground, a point cloud is encoded into a graph structure, tri-grid field, which treats each tri-grid as a node. Then, the traversable regions are searched and redefined by examining local convexity and concavity of edges that connect nodes. On the other hand, our above-ground object segmentation employs a graph structure by representing a group of horizontally neighboring 3D points in a spherical-projection space as a node and vertical/horizontal relationship between nodes as an edge. Fully leveraging the node-edge structure, the above-ground segmentation ensures real-time operation and mitigates over-segmentation. Through experiments using simulations, urban scenes, and our own datasets, we have demonstrated that our proposed traversable ground segmentation algorithm outperforms other state-of-the-art methods in terms of the conventional metrics and that our newly proposed evaluation metrics are meaningful for assessing the above-ground segmentation. We will make the code and our own dataset available to public at https://github.com/url-kaist/TRAVEL.
Evaluating the Robustness of Trigger Set-Based Watermarks Embedded in Deep Neural Networks
Jun 18, 2021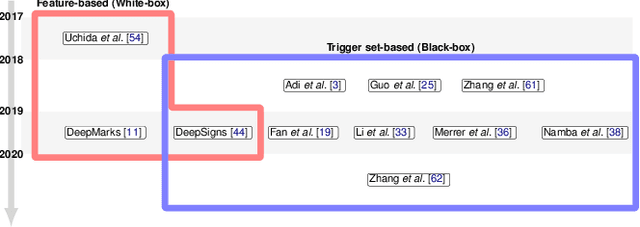
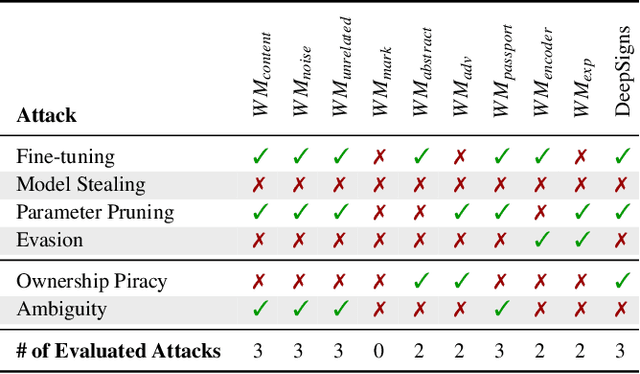
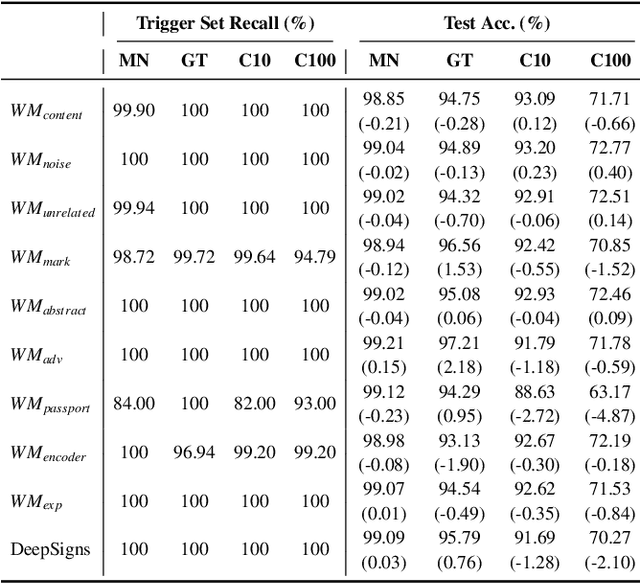
Trigger set-based watermarking schemes have gained emerging attention as they provide a means to prove ownership for deep neural network model owners. In this paper, we argue that state-of-the-art trigger set-based watermarking algorithms do not achieve their designed goal of proving ownership. We posit that this impaired capability stems from two common experimental flaws that the existing research practice has committed when evaluating the robustness of watermarking algorithms: (1) incomplete adversarial evaluation and (2) overlooked adaptive attacks. We conduct a comprehensive adversarial evaluation of 10 representative watermarking schemes against six of the existing attacks and demonstrate that each of these watermarking schemes lacks robustness against at least two attacks. We also propose novel adaptive attacks that harness the adversary's knowledge of the underlying watermarking algorithm of a target model. We demonstrate that the proposed attacks effectively break all of the 10 watermarking schemes, consequently allowing adversaries to obscure the ownership of any watermarked model. We encourage follow-up studies to consider our guidelines when evaluating the robustness of their watermarking schemes via conducting comprehensive adversarial evaluation that include our adaptive attacks to demonstrate a meaningful upper bound of watermark robustness.
A community-powered search of machine learning strategy space to find NMR property prediction models
Aug 13, 2020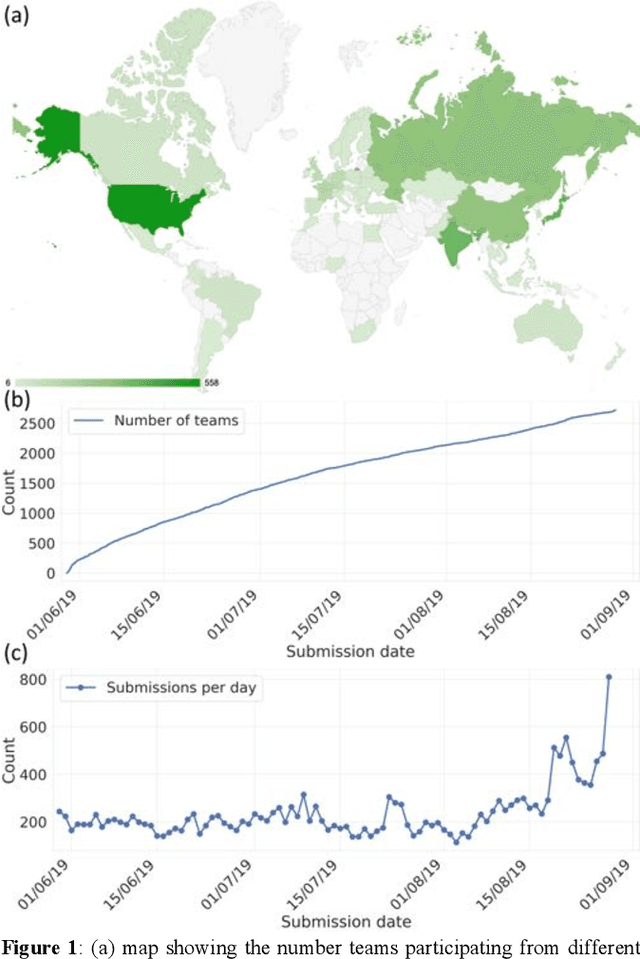
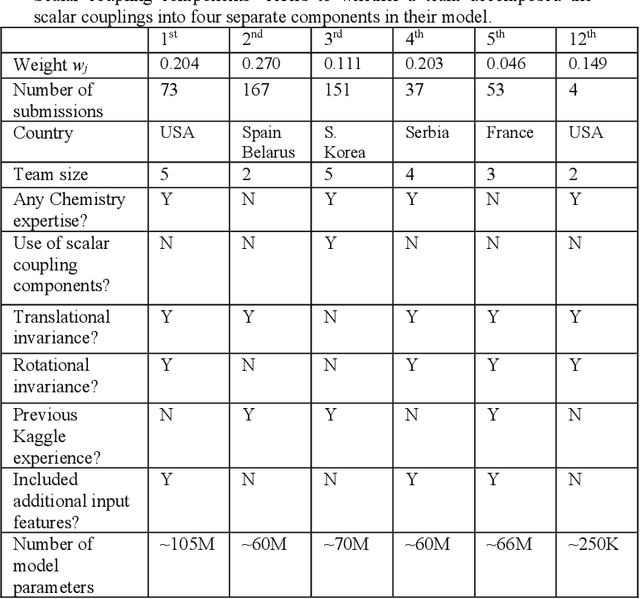
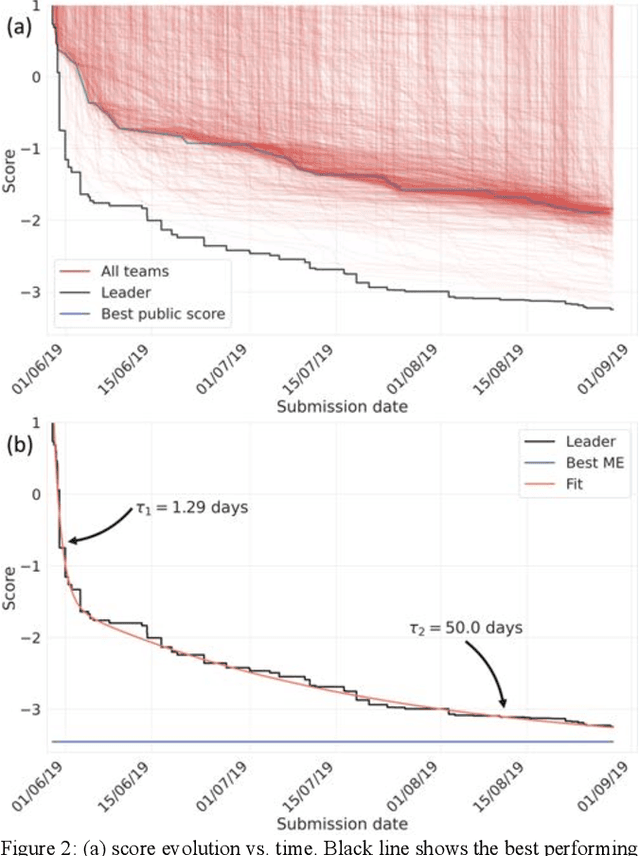
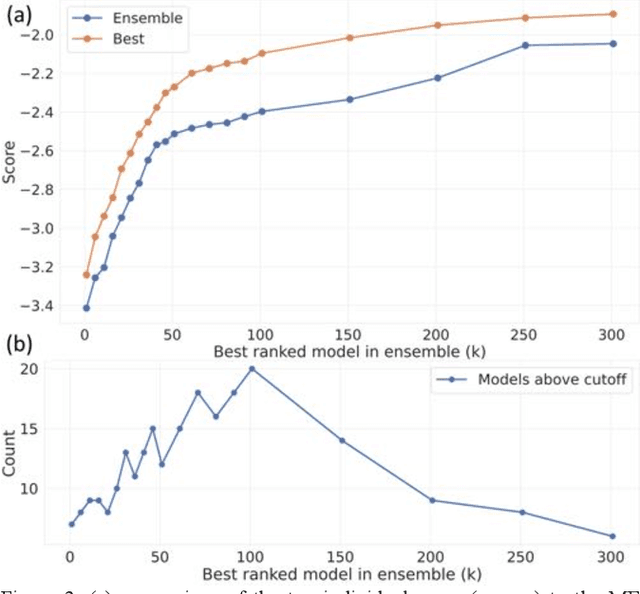
The rise of machine learning (ML) has created an explosion in the potential strategies for using data to make scientific predictions. For physical scientists wishing to apply ML strategies to a particular domain, it can be difficult to assess in advance what strategy to adopt within a vast space of possibilities. Here we outline the results of an online community-powered effort to swarm search the space of ML strategies and develop algorithms for predicting atomic-pairwise nuclear magnetic resonance (NMR) properties in molecules. Using an open-source dataset, we worked with Kaggle to design and host a 3-month competition which received 47,800 ML model predictions from 2,700 teams in 84 countries. Within 3 weeks, the Kaggle community produced models with comparable accuracy to our best previously published "in-house" efforts. A meta-ensemble model constructed as a linear combination of the top predictions has a prediction accuracy which exceeds that of any individual model, 7-19x better than our previous state-of-the-art. The results highlight the potential of transformer architectures for predicting quantum mechanical (QM) molecular properties.