 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisentangling Language Roles in Multilingual LLM Task Execution
May 26, 2026Multilingual LLMs are increasingly used when instruction, source content, and required response languages do not coincide. Existing benchmarks have expanded multilingual instruction-following evaluation, but they rarely isolate these three roles within a fully crossed design. We introduce MTM-Bench, a controlled benchmark for language-conditioned task execution in which each instance is defined by a triplet \((L_{\text{instr}}, L_{\text{content}}, L_{\text{resp}})\). Across English, Spanish, and Chinese, MTM-Bench enumerates all 27 triplets and contains 2{,}430 instances per model across semantic reversal, final-state extraction, and language purity with update realization. We evaluate 20 frontier and open-weight LLMs using decomposed metrics for semantic correctness, target-language adherence, constraint satisfaction, contamination ratio, and joint success, with scoring validated by a targeted human audit. The fully crossed design reveals that degradation is organized by the role a language occupies in the task structure, not merely by mismatch count. The response-language role is the dominant axis of variation, and a single response-slot mismatch accounts for most degradation. The response-only and full-mismatch comparison suggests that mismatch count is not a monotonic predictor of difficulty, with model-level ordering varying across systems. Task families fail through distinct channels, showing that semantic correctness alone does not capture reliable multilingual task execution.
Chamelion: Reliable Change Detection for Long-Term LiDAR Mapping in Transient Environments
Feb 09, 2026Online change detection is crucial for mobile robots to efficiently navigate through dynamic environments. Detecting changes in transient settings, such as active construction sites or frequently reconfigured indoor spaces, is particularly challenging due to frequent occlusions and spatiotemporal variations. Existing approaches often struggle to detect changes and fail to update the map across different observations. To address these limitations, we propose a dual-head network designed for online change detection and long-term map maintenance. A key difficulty in this task is the collection and alignment of real-world data, as manually registering structural differences over time is both labor-intensive and often impractical. To overcome this, we develop a data augmentation strategy that synthesizes structural changes by importing elements from different scenes, enabling effective model training without the need for extensive ground-truth annotations. Experiments conducted at real-world construction sites and in indoor office environments demonstrate that our approach generalizes well across diverse scenarios, achieving efficient and accurate map updates.\resubmit{Our source code and additional material are available at: https://chamelion-pages.github.io/.
TRIP: Terrain Traversability Mapping With Risk-Aware Prediction for Enhanced Online Quadrupedal Robot Navigation
Nov 26, 2024



Accurate traversability estimation using an online dense terrain map is crucial for safe navigation in challenging environments like construction and disaster areas. However, traversability estimation for legged robots on rough terrains faces substantial challenges owing to limited terrain information caused by restricted field-of-view, and data occlusion and sparsity. To robustly map traversable regions, we introduce terrain traversability mapping with risk-aware prediction (TRIP). TRIP reconstructs the terrain maps while predicting multi-modal traversability risks, enhancing online autonomous navigation with the following contributions. Firstly, estimating steppability in a spherical projection space allows for addressing data sparsity while accomodating scalable terrain properties. Moreover, the proposed traversability-aware Bayesian generalized kernel (T-BGK)-based inference method enhances terrain completion accuracy and efficiency. Lastly, leveraging the steppability-based Mahalanobis distance contributes to robustness against outliers and dynamic elements, ultimately yielding a static terrain traversability map. As verified in both public and our in-house datasets, our TRIP shows significant performance increases in terms of terrain reconstruction and navigation map. A demo video that demonstrates its feasibility as an integral component within an onboard online autonomous navigation system for quadruped robots is available at https://youtu.be/d7HlqAP4l0c.
HeLiMOS: A Dataset for Moving Object Segmentation in 3D Point Clouds From Heterogeneous LiDAR Sensors
Aug 12, 2024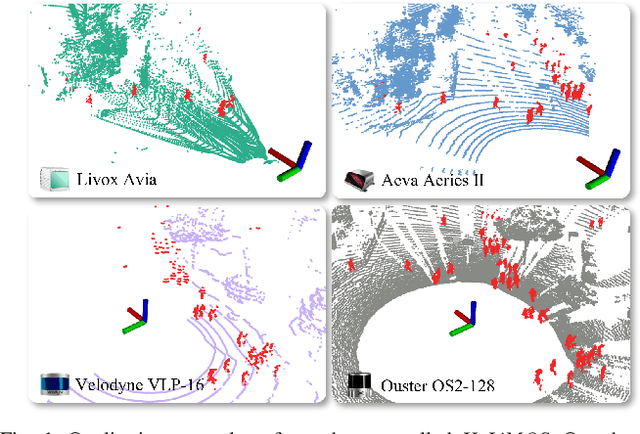
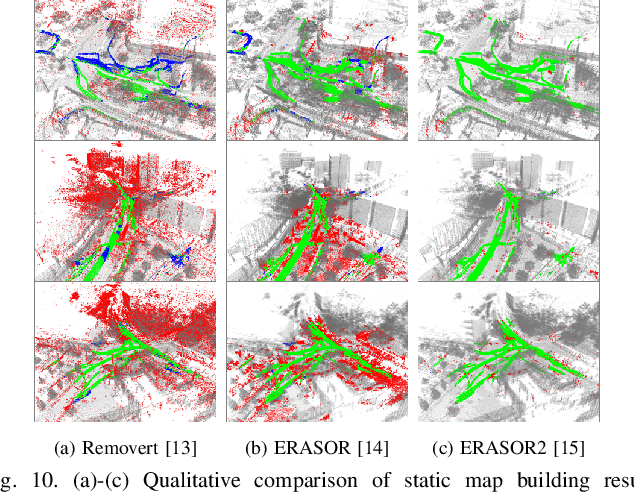
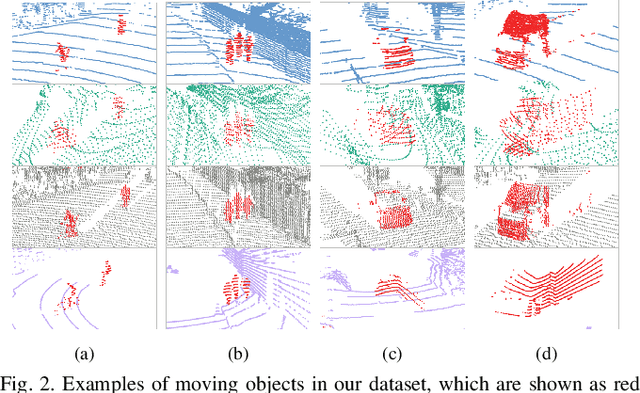
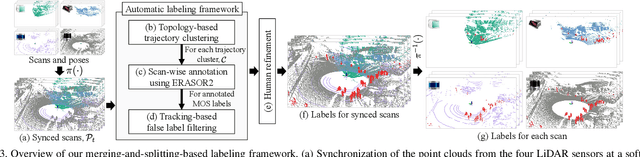
Moving object segmentation (MOS) using a 3D light detection and ranging (LiDAR) sensor is crucial for scene understanding and identification of moving objects. Despite the availability of various types of 3D LiDAR sensors in the market, MOS research still predominantly focuses on 3D point clouds from mechanically spinning omnidirectional LiDAR sensors. Thus, we are, for example, lacking a dataset with MOS labels for point clouds from solid-state LiDAR sensors which have irregular scanning patterns. In this paper, we present a labeled dataset, called \textit{HeLiMOS}, that enables to test MOS approaches on four heterogeneous LiDAR sensors, including two solid-state LiDAR sensors. Furthermore, we introduce a novel automatic labeling method to substantially reduce the labeling effort required from human annotators. To this end, our framework exploits an instance-aware static map building approach and tracking-based false label filtering. Finally, we provide experimental results regarding the performance of commonly used state-of-the-art MOS approaches on HeLiMOS that suggest a new direction for a sensor-agnostic MOS, which generally works regardless of the type of LiDAR sensors used to capture 3D point clouds. Our dataset is available at https://sites.google.com/view/helimos.
TOSS: Real-time Tracking and Moving Object Segmentation for Static Scene Mapping
Aug 10, 2024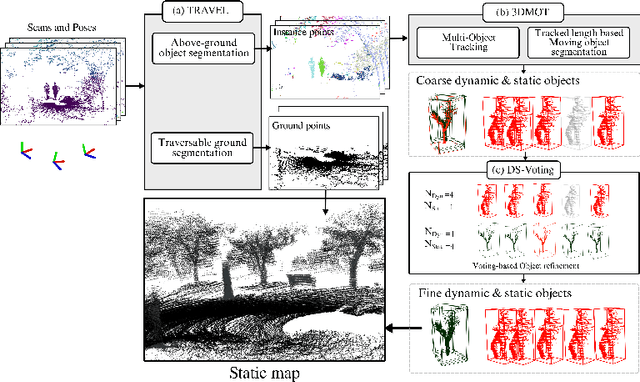
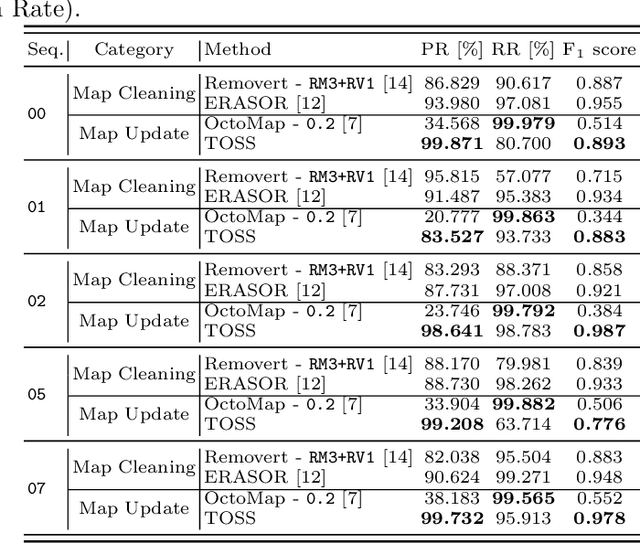
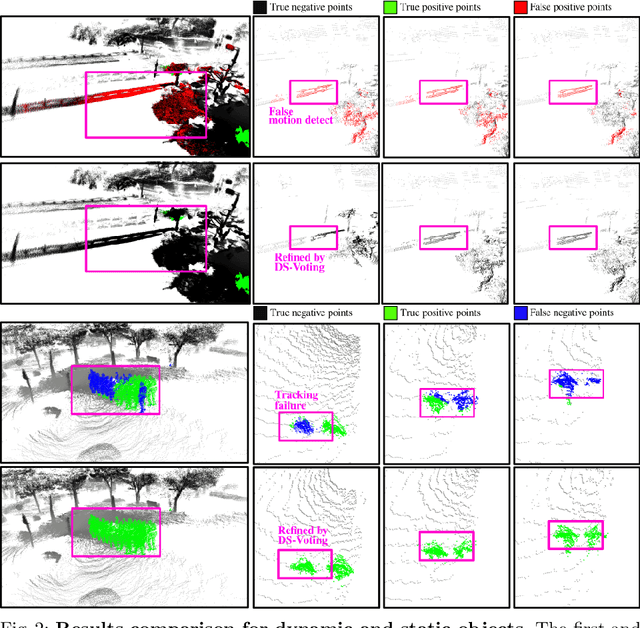
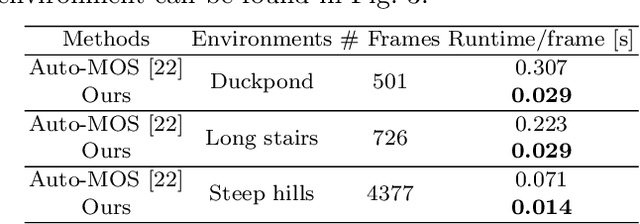
Safe navigation with simultaneous localization and mapping (SLAM) for autonomous robots is crucial in challenging environments. To achieve this goal, detecting moving objects in the surroundings and building a static map are essential. However, existing moving object segmentation methods have been developed separately for each field, making it challenging to perform real-time navigation and precise static map building simultaneously. In this paper, we propose an integrated real-time framework that combines online tracking-based moving object segmentation with static map building. For safe navigation, we introduce a computationally efficient hierarchical association cost matrix to enable real-time moving object segmentation. In the context of precise static mapping, we present a voting-based method, DS-Voting, designed to achieve accurate dynamic object removal and static object recovery by emphasizing their spatio-temporal differences. We evaluate our proposed method quantitatively and qualitatively in the SemanticKITTI dataset and real-world challenging environments. The results demonstrate that dynamic objects can be clearly distinguished and incorporated into static map construction, even in stairs, steep hills, and dense vegetation.
B-TMS: Bayesian Traversable Terrain Modeling and Segmentation Across 3D LiDAR Scans and Maps for Enhanced Off-Road Navigation
Jun 26, 2024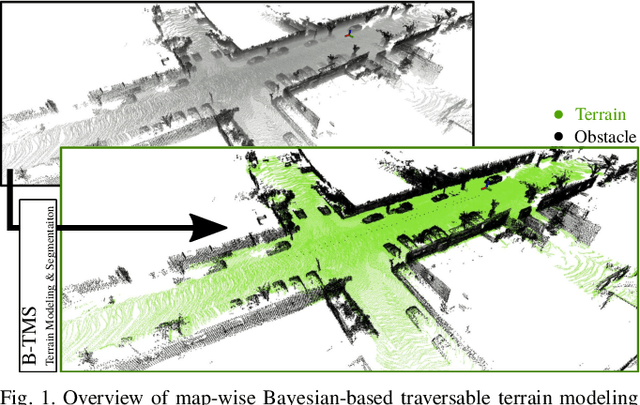

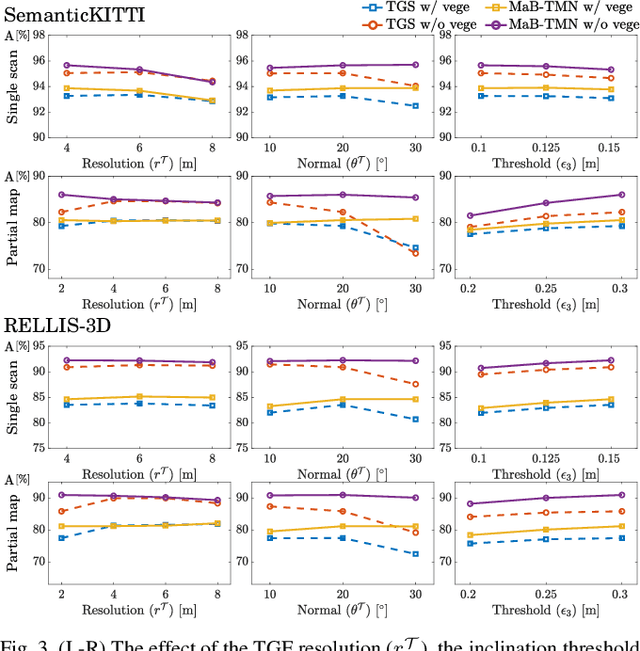
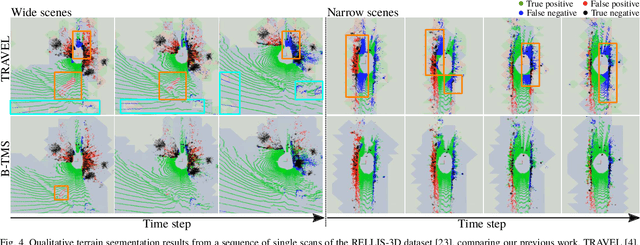
Recognizing traversable terrain from 3D point cloud data is critical, as it directly impacts the performance of autonomous navigation in off-road environments. However, existing segmentation algorithms often struggle with challenges related to changes in data distribution, environmental specificity, and sensor variations. Moreover, when encountering sunken areas, their performance is frequently compromised, and they may even fail to recognize them. To address these challenges, we introduce B-TMS, a novel approach that performs map-wise terrain modeling and segmentation by utilizing Bayesian generalized kernel (BGK) within the graph structure known as the tri-grid field (TGF). Our experiments encompass various data distributions, ranging from single scans to partial maps, utilizing both public datasets representing urban scenes and off-road environments, and our own dataset acquired from extremely bumpy terrains. Our results demonstrate notable contributions, particularly in terms of robustness to data distribution variations, adaptability to diverse environmental conditions, and resilience against the challenges associated with parameter changes.