 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSE(3)-LIO: Smooth IMU Propagation With Jointly Distributed Poses on SE(3) Manifold for Accurate and Robust LiDAR-Inertial Odometry
Mar 17, 2026In estimating odometry accurately, an inertial measurement unit (IMU) is widely used owing to its high-rate measurements, which can be utilized to obtain motion information through IMU propagation. In this paper, we address the limitations of existing IMU propagation methods in terms of motion prediction and motion compensation. In motion prediction, the existing methods typically represent a 6-DoF pose by separating rotation and translation and propagate them on their respective manifold, so that the rotational variation is not effectively incorporated into translation propagation. During motion compensation, the relative transformation between predicted poses is used to compensate motion-induced distortion in other measurements, while inherent errors in the predicted poses introduce uncertainty in the relative transformation. To tackle these challenges, we represent and propagate the pose on SE(3) manifold, where propagated translation properly accounts for rotational variation. Furthermore, we precisely characterize the relative transformation uncertainty by considering the correlation between predicted poses, and incorporate this uncertainty into the measurement noise during motion compensation. To this end, we propose a LiDAR-inertial odometry (LIO), referred to as SE(3)-LIO, that integrates the proposed IMU propagation and uncertainty-aware motion compensation (UAMC). We validate the effectiveness of SE(3)-LIO on diverse datasets. Our source code and additional material are available at: https://se3-lio.github.io/.
B-TMS: Bayesian Traversable Terrain Modeling and Segmentation Across 3D LiDAR Scans and Maps for Enhanced Off-Road Navigation
Jun 26, 2024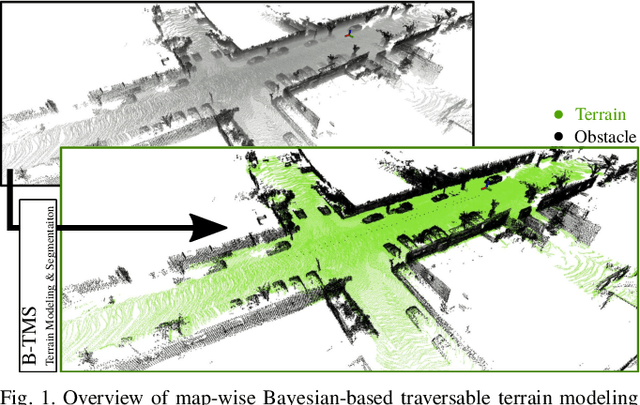

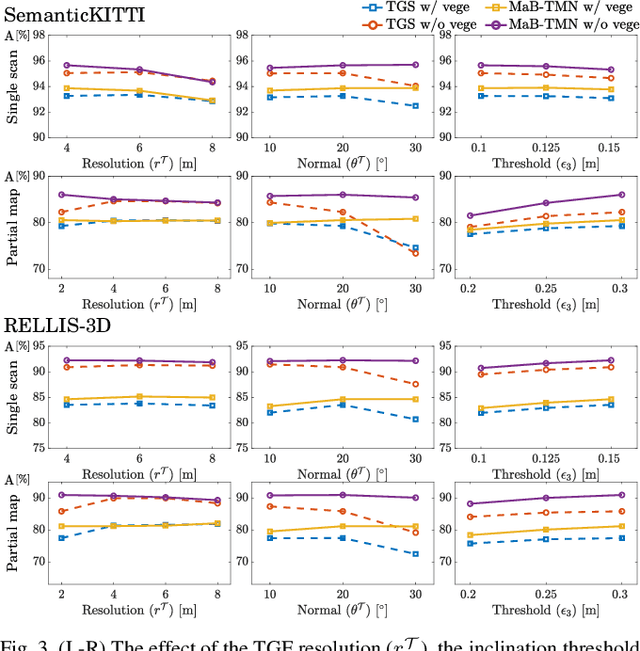
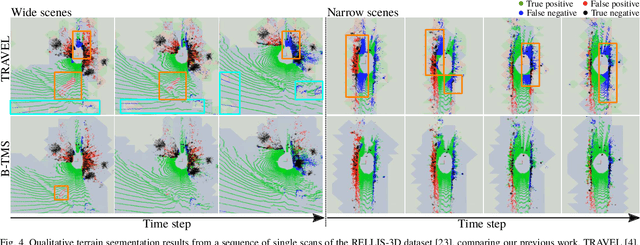
Recognizing traversable terrain from 3D point cloud data is critical, as it directly impacts the performance of autonomous navigation in off-road environments. However, existing segmentation algorithms often struggle with challenges related to changes in data distribution, environmental specificity, and sensor variations. Moreover, when encountering sunken areas, their performance is frequently compromised, and they may even fail to recognize them. To address these challenges, we introduce B-TMS, a novel approach that performs map-wise terrain modeling and segmentation by utilizing Bayesian generalized kernel (BGK) within the graph structure known as the tri-grid field (TGF). Our experiments encompass various data distributions, ranging from single scans to partial maps, utilizing both public datasets representing urban scenes and off-road environments, and our own dataset acquired from extremely bumpy terrains. Our results demonstrate notable contributions, particularly in terms of robustness to data distribution variations, adaptability to diverse environmental conditions, and resilience against the challenges associated with parameter changes.
ORORA: Outlier-Robust Radar Odometry
Mar 03, 2023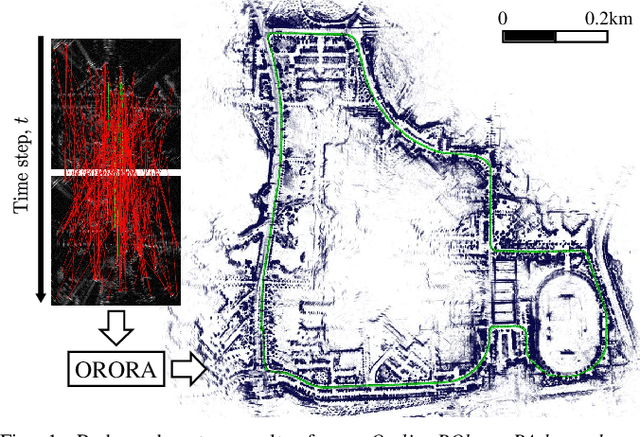
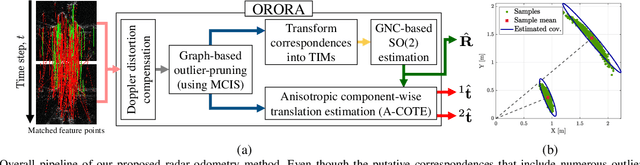
Radar sensors are emerging as solutions for perceiving surroundings and estimating ego-motion in extreme weather conditions. Unfortunately, radar measurements are noisy and suffer from mutual interference, which degrades the performance of feature extraction and matching, triggering imprecise matching pairs, which are referred to as outliers. To tackle the effect of outliers on radar odometry, a novel outlier-robust method called \textit{ORORA} is proposed, which is an abbreviation of \textit{Outlier-RObust RAdar odometry}. To this end, a novel decoupling-based method is proposed, which consists of graduated non-convexity~(GNC)-based rotation estimation and anisotropic component-wise translation estimation~(A-COTE). Furthermore, our method leverages the anisotropic characteristics of radar measurements, each of whose uncertainty along the azimuthal direction is somewhat larger than that along the radial direction. As verified in the public dataset, it was demonstrated that our proposed method yields robust ego-motion estimation performance compared with other state-of-the-art methods. Our code is available at https://github.com/url-kaist/outlier-robust-radar-odometry.