 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInlier-Centric Post-Training Quantization for Object Detection Models
Feb 03, 2026Object detection is pivotal in computer vision, yet its immense computational demands make deployment slow and power-hungry, motivating quantization. However, task-irrelevant morphologies such as background clutter and sensor noise induce redundant activations (or anomalies). These anomalies expand activation ranges and skew activation distributions toward task-irrelevant responses, complicating bit allocation and weakening the preservation of informative features. Without a clear criterion to distinguish anomalies, suppressing them can inadvertently discard useful information. To address this, we present InlierQ, an inlier-centric post-training quantization approach that separates anomalies from informative inliers. InlierQ computes gradient-aware volume saliency scores, classifies each volume as an inlier or anomaly, and fits a posterior distribution over these scores using the Expectation-Maximization (EM) algorithm. This design suppresses anomalies while preserving informative features. InlierQ is label-free, drop-in, and requires only 64 calibration samples. Experiments on the COCO and nuScenes benchmarks show consistent reductions in quantization error for camera-based (2D and 3D) and LiDAR-based (3D) object detection.
Mitigating Trade-off: Stream and Query-guided Aggregation for Efficient and Effective 3D Occupancy Prediction
Mar 28, 2025



3D occupancy prediction has emerged as a key perception task for autonomous driving, as it reconstructs 3D environments to provide a comprehensive scene understanding. Recent studies focus on integrating spatiotemporal information obtained from past observations to improve prediction accuracy, using a multi-frame fusion approach that processes multiple past frames together. However, these methods struggle with a trade-off between efficiency and accuracy, which significantly limits their practicality. To mitigate this trade-off, we propose StreamOcc, a novel framework that aggregates spatio-temporal information in a stream-based manner. StreamOcc consists of two key components: (i) Stream-based Voxel Aggregation, which effectively accumulates past observations while minimizing computational costs, and (ii) Query-guided Aggregation, which recurrently aggregates instance-level features of dynamic objects into corresponding voxel features, refining fine-grained details of dynamic objects. Experiments on the Occ3D-nuScenes dataset show that StreamOcc achieves state-of-the-art performance in real-time settings, while reducing memory usage by more than 50% compared to previous methods.
Ephemerality meets LiDAR-based Lifelong Mapping
Feb 19, 2025Lifelong mapping is crucial for the long-term deployment of robots in dynamic environments. In this paper, we present ELite, an ephemerality-aided LiDAR-based lifelong mapping framework which can seamlessly align multiple session data, remove dynamic objects, and update maps in an end-to-end fashion. Map elements are typically classified as static or dynamic, but cases like parked cars indicate the need for more detailed categories than binary. Central to our approach is the probabilistic modeling of the world into two-stage $\textit{ephemerality}$, which represent the transiency of points in the map within two different time scales. By leveraging the spatiotemporal context encoded in ephemeralities, ELite can accurately infer transient map elements, maintain a reliable up-to-date static map, and improve robustness in aligning the new data in a more fine-grained manner. Extensive real-world experiments on long-term datasets demonstrate the robustness and effectiveness of our system. The source code is publicly available for the robotics community: https://github.com/dongjae0107/ELite.
Narrowing your FOV with SOLiD: Spatially Organized and Lightweight Global Descriptor for FOV-constrained LiDAR Place Recognition
Aug 14, 2024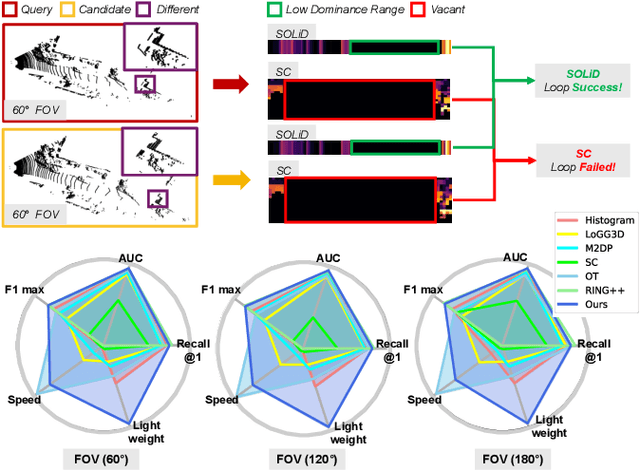

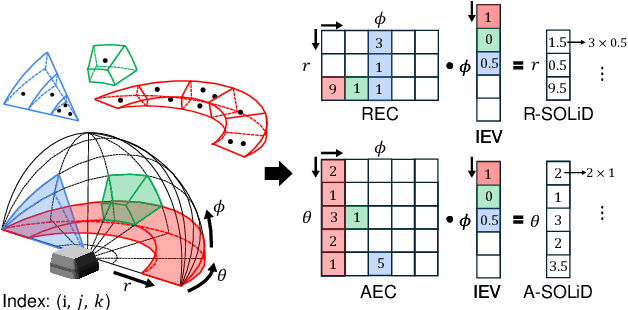

We often encounter limited FOV situations due to various factors such as sensor fusion or sensor mount in real-world robot navigation. However, the limited FOV interrupts the generation of descriptions and impacts place recognition adversely. Therefore, we suffer from correcting accumulated drift errors in a consistent map using LiDAR-based place recognition with limited FOV. Thus, in this paper, we propose a robust LiDAR-based place recognition method for handling narrow FOV scenarios. The proposed method establishes spatial organization based on the range-elevation bin and azimuth-elevation bin to represent places. In addition, we achieve a robust place description through reweighting based on vertical direction information. Based on these representations, our method enables addressing rotational changes and determining the initial heading. Additionally, we designed a lightweight and fast approach for the robot's onboard autonomy. For rigorous validation, the proposed method was tested across various LiDAR place recognition scenarios (i.e., single-session, multi-session, and multi-robot scenarios). To the best of our knowledge, we report the first method to cope with the restricted FOV. Our place description and SLAM codes will be released. Also, the supplementary materials of our descriptor are available at \texttt{\url{https://sites.google.com/view/lidar-solid}}.
Addressing Diverging Training Costs using Local Restoration for Precise Bird's Eye View Map Construction
May 02, 2024Recent advancements in Bird's Eye View (BEV) fusion for map construction have demonstrated remarkable mapping of urban environments. However, their deep and bulky architecture incurs substantial amounts of backpropagation memory and computing latency. Consequently, the problem poses an unavoidable bottleneck in constructing high-resolution (HR) BEV maps, as their large-sized features cause significant increases in costs including GPU memory consumption and computing latency, named diverging training costs issue. Affected by the problem, most existing methods adopt low-resolution (LR) BEV and struggle to estimate the precise locations of urban scene components like road lanes, and sidewalks. As the imprecision leads to risky self-driving, the diverging training costs issue has to be resolved. In this paper, we address the issue with our novel Trumpet Neural Network (TNN) mechanism. The framework utilizes LR BEV space and outputs an up-sampled semantic BEV map to create a memory-efficient pipeline. To this end, we introduce Local Restoration of BEV representation. Specifically, the up-sampled BEV representation has severely aliased, blocky signals, and thick semantic labels. Our proposed Local Restoration restores the signals and thins (or narrows down) the width of the labels. Our extensive experiments show that the TNN mechanism provides a plug-and-play memory-efficient pipeline, thereby enabling the effective estimation of real-sized (or precise) semantic labels for BEV map construction.
HeLiPR: Heterogeneous LiDAR Dataset for inter-LiDAR Place Recognition under Spatial and Temporal Variations
Sep 26, 2023



Place recognition is crucial for robotic localization and loop closure in simultaneous localization and mapping (SLAM). Recently, LiDARs have gained popularity due to their robust sensing capability and measurement consistency, even in the illumination-variant environment, offering an advantage over traditional imaging sensors. Spinning LiDARs are widely accepted among many types, while non-repetitive scanning patterns have recently been utilized in robotic applications. Beyond the range measurements, some LiDARs offer additional measurements, such as reflectivity, Near Infrared (NIR), and velocity (e.g., FMCW LiDARs). Despite these advancements, a noticeable dearth of datasets comprehensively reflects the broad spectrum of LiDAR configurations optimized for place recognition. To tackle this issue, our paper proposes the HeLiPR dataset, curated especially for place recognition with heterogeneous LiDAR systems, embodying spatial-temporal variations. To the best of our knowledge, the HeLiPR dataset is the first heterogeneous LiDAR dataset designed to support inter-LiDAR place recognition with both non-repetitive and spinning LiDARs, accommodating different field of view (FOV) and varying numbers of rays. Encompassing the distinct LiDAR configurations, it captures varied environments ranging from urban cityscapes to high-dynamic freeways over a month, designed to enhance the adaptability and robustness of place recognition across diverse scenarios. Notably, the HeLiPR dataset also includes trajectories that parallel sequences from MulRan, underscoring its utility for research in heterogeneous LiDAR place recognition and long-term studies. The dataset is accessible at https: //sites.google.com/view/heliprdataset.
BroadBEV: Collaborative LiDAR-camera Fusion for Broad-sighted Bird's Eye View Map Construction
Sep 25, 2023A recent sensor fusion in a Bird's Eye View (BEV) space has shown its utility in various tasks such as 3D detection, map segmentation, etc. However, the approach struggles with inaccurate camera BEV estimation, and a perception of distant areas due to the sparsity of LiDAR points. In this paper, we propose a broad BEV fusion (BroadBEV) that addresses the problems with a spatial synchronization approach of cross-modality. Our strategy aims to enhance camera BEV estimation for a broad-sighted perception while simultaneously improving the completion of LiDAR's sparsity in the entire BEV space. Toward that end, we devise Point-scattering that scatters LiDAR BEV distribution to camera depth distribution. The method boosts the learning of depth estimation of the camera branch and induces accurate location of dense camera features in BEV space. For an effective BEV fusion between the spatially synchronized features, we suggest ColFusion that applies self-attention weights of LiDAR and camera BEV features to each other. Our extensive experiments demonstrate that BroadBEV provides a broad-sighted BEV perception with remarkable performance gains.
ORORA: Outlier-Robust Radar Odometry
Mar 03, 2023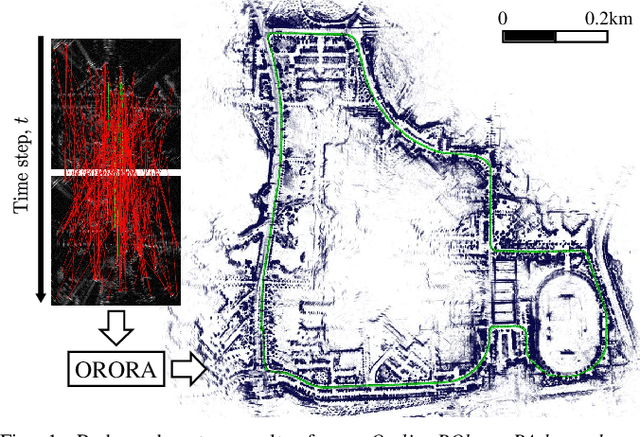
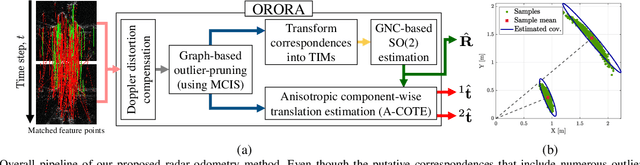
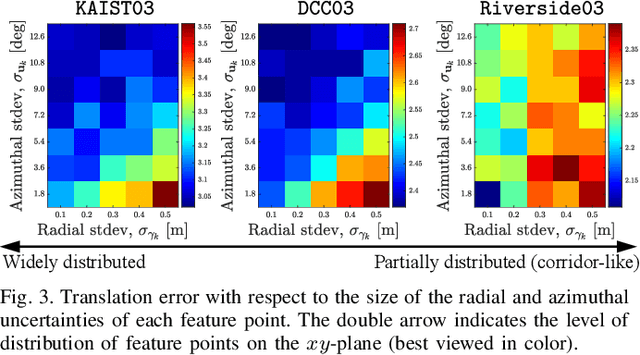
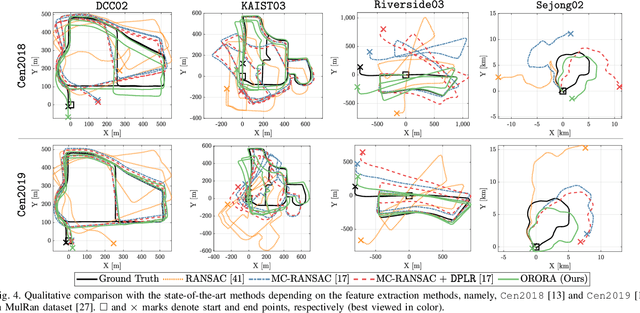
Radar sensors are emerging as solutions for perceiving surroundings and estimating ego-motion in extreme weather conditions. Unfortunately, radar measurements are noisy and suffer from mutual interference, which degrades the performance of feature extraction and matching, triggering imprecise matching pairs, which are referred to as outliers. To tackle the effect of outliers on radar odometry, a novel outlier-robust method called \textit{ORORA} is proposed, which is an abbreviation of \textit{Outlier-RObust RAdar odometry}. To this end, a novel decoupling-based method is proposed, which consists of graduated non-convexity~(GNC)-based rotation estimation and anisotropic component-wise translation estimation~(A-COTE). Furthermore, our method leverages the anisotropic characteristics of radar measurements, each of whose uncertainty along the azimuthal direction is somewhat larger than that along the radial direction. As verified in the public dataset, it was demonstrated that our proposed method yields robust ego-motion estimation performance compared with other state-of-the-art methods. Our code is available at https://github.com/url-kaist/outlier-robust-radar-odometry.
OpenStreetMap-based LiDAR Global Localization in Urban Environment without a Prior LiDAR Map
Feb 15, 2022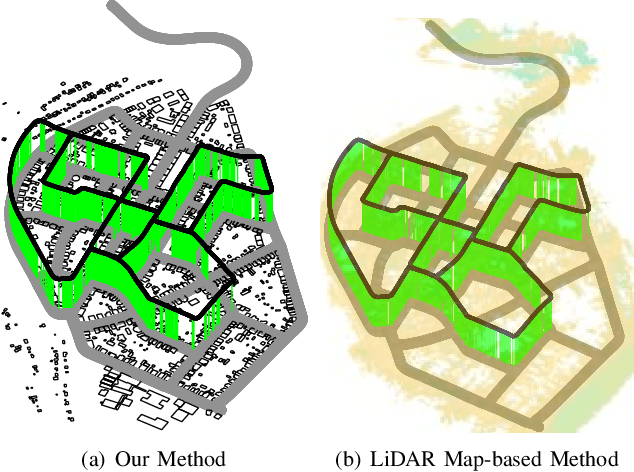


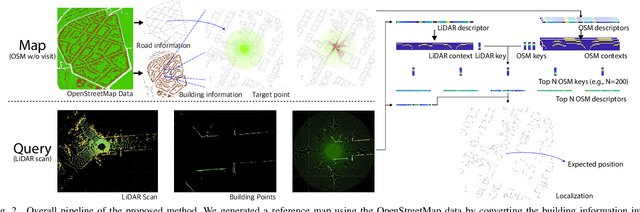
Using publicly accessible maps, we propose a novel vehicle localization method that can be applied without using prior light detection and ranging (LiDAR) maps. Our method generates OSM descriptors by calculating the distances to buildings from a location in OpenStreetMap at a regular angle, and LiDAR descriptors by calculating the shortest distances to building points from the current location at a regular angle. Comparing the OSM descriptors and LiDAR descriptors yields a highly accurate vehicle localization result. Compared to methods that use prior LiDAR maps, our method presents two main advantages: (1) vehicle localization is not limited to only places with previously acquired LiDAR maps, and (2) our method is comparable to LiDAR map-based methods, and especially outperforms the other methods with respect to the top one candidate at KITTI dataset sequence 00.
SC-LiDAR-SLAM: a Front-end Agnostic Versatile LiDAR SLAM System
Jan 17, 2022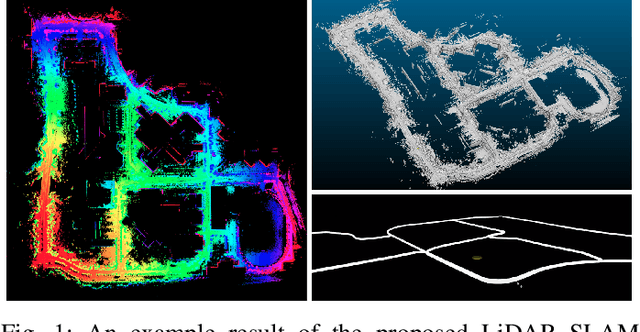
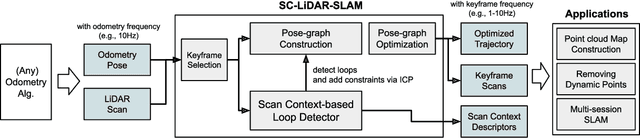
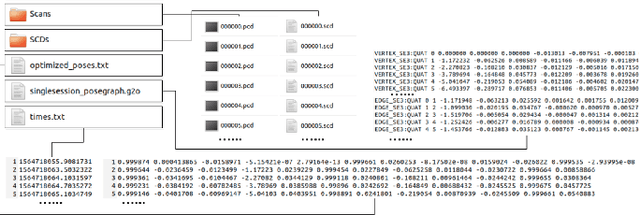
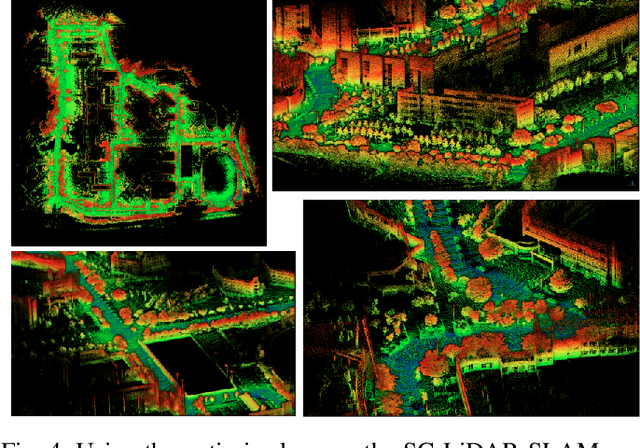
Accurate 3D point cloud map generation is a core task for various robot missions or even for data-driven urban analysis. To do so, light detection and ranging (LiDAR) sensor-based simultaneous localization and mapping (SLAM) technology have been elaborated. To compose a full SLAM system, many odometry and place recognition methods have independently been proposed in academia. However, they have hardly been integrated or too tightly combined so that exchanging (upgrading) either single odometry or place recognition module is very effort demanding. Recently, the performance of each module has been improved a lot, so it is necessary to build a SLAM system that can effectively integrate them and easily replace them with the latest one. In this paper, we release such a front-end agnostic LiDAR SLAM system, named SC-LiDAR-SLAM. We built a complete SLAM system by designing it modular, and successfully integrating it with Scan Context++ and diverse existing opensource LiDAR odometry methods to generate an accurate point cloud map