 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegistration beyond Points: General Affine Subspace Alignment via Geodesic Distance on Grassmann Manifold
Jul 24, 2025Affine Grassmannian has been favored for expressing proximity between lines and planes due to its theoretical exactness in measuring distances among features. Despite this advantage, the existing method can only measure the proximity without yielding the distance as an explicit function of rigid body transformation. Thus, an optimizable distance function on the manifold has remained underdeveloped, stifling its application in registration problems. This paper is the first to explicitly derive an optimizable cost function between two Grassmannian features with respect to rigid body transformation ($\mathbf{R}$ and $\mathbf{t}$). Specifically, we present a rigorous mathematical proof demonstrating that the bases of high-dimensional linear subspaces can serve as an explicit representation of the cost. Finally, we propose an optimizable cost function based on the transformed bases that can be applied to the registration problem of any affine subspace. Compared to vector parameter-based approaches, our method is able to find a globally optimal solution by directly minimizing the geodesic distance which is agnostic to representation ambiguity. The resulting cost function and its extension to the inlier-set maximizing \ac{BnB} solver have been demonstrated to improve the convergence of existing solutions or outperform them in various computer vision tasks. The code is available on https://github.com/joomeok/GrassmannRegistration.
Ephemerality meets LiDAR-based Lifelong Mapping
Feb 19, 2025Lifelong mapping is crucial for the long-term deployment of robots in dynamic environments. In this paper, we present ELite, an ephemerality-aided LiDAR-based lifelong mapping framework which can seamlessly align multiple session data, remove dynamic objects, and update maps in an end-to-end fashion. Map elements are typically classified as static or dynamic, but cases like parked cars indicate the need for more detailed categories than binary. Central to our approach is the probabilistic modeling of the world into two-stage $\textit{ephemerality}$, which represent the transiency of points in the map within two different time scales. By leveraging the spatiotemporal context encoded in ephemeralities, ELite can accurately infer transient map elements, maintain a reliable up-to-date static map, and improve robustness in aligning the new data in a more fine-grained manner. Extensive real-world experiments on long-term datasets demonstrate the robustness and effectiveness of our system. The source code is publicly available for the robotics community: https://github.com/dongjae0107/ELite.
HeLiOS: Heterogeneous LiDAR Place Recognition via Overlap-based Learning and Local Spherical Transformer
Jan 31, 2025LiDAR place recognition is a crucial module in localization that matches the current location with previously observed environments. Most existing approaches in LiDAR place recognition dominantly focus on the spinning type LiDAR to exploit its large FOV for matching. However, with the recent emergence of various LiDAR types, the importance of matching data across different LiDAR types has grown significantly-a challenge that has been largely overlooked for many years. To address these challenges, we introduce HeLiOS, a deep network tailored for heterogeneous LiDAR place recognition, which utilizes small local windows with spherical transformers and optimal transport-based cluster assignment for robust global descriptors. Our overlap-based data mining and guided-triplet loss overcome the limitations of traditional distance-based mining and discrete class constraints. HeLiOS is validated on public datasets, demonstrating performance in heterogeneous LiDAR place recognition while including an evaluation for long-term recognition, showcasing its ability to handle unseen LiDAR types. We release the HeLiOS code as an open source for the robotics community at https://github.com/minwoo0611/HeLiOS.
Fieldscale: Locality-Aware Field-based Adaptive Rescaling for Thermal Infrared Image
May 24, 2024



Thermal infrared (TIR) cameras are emerging as promising sensors in safety-related fields due to their robustness against external illumination. However, RAW TIR image has 14 bits of pixel depth and needs to be rescaled into 8 bits for general applications. Previous works utilize a global 1D look-up table to compute pixel-wise gain solely based on its intensity, which degrades image quality by failing to consider the local nature of the heat. We propose Fieldscale, a rescaling based on locality-aware 2D fields where both the intensity value and spatial context of each pixel within an image are embedded. It can adaptively determine the pixel gain for each region and produce spatially consistent 8-bit rescaled images with minimal information loss and high visibility. Consistent performance improvement on image quality assessment and two other downstream tasks support the effectiveness and usability of Fieldscale. All the codes are publicly opened to facilitate research advancements in this field. https://github.com/hyeonjaegil/fieldscale
HeLiPR: Heterogeneous LiDAR Dataset for inter-LiDAR Place Recognition under Spatial and Temporal Variations
Sep 26, 2023



Place recognition is crucial for robotic localization and loop closure in simultaneous localization and mapping (SLAM). Recently, LiDARs have gained popularity due to their robust sensing capability and measurement consistency, even in the illumination-variant environment, offering an advantage over traditional imaging sensors. Spinning LiDARs are widely accepted among many types, while non-repetitive scanning patterns have recently been utilized in robotic applications. Beyond the range measurements, some LiDARs offer additional measurements, such as reflectivity, Near Infrared (NIR), and velocity (e.g., FMCW LiDARs). Despite these advancements, a noticeable dearth of datasets comprehensively reflects the broad spectrum of LiDAR configurations optimized for place recognition. To tackle this issue, our paper proposes the HeLiPR dataset, curated especially for place recognition with heterogeneous LiDAR systems, embodying spatial-temporal variations. To the best of our knowledge, the HeLiPR dataset is the first heterogeneous LiDAR dataset designed to support inter-LiDAR place recognition with both non-repetitive and spinning LiDARs, accommodating different field of view (FOV) and varying numbers of rays. Encompassing the distinct LiDAR configurations, it captures varied environments ranging from urban cityscapes to high-dynamic freeways over a month, designed to enhance the adaptability and robustness of place recognition across diverse scenarios. Notably, the HeLiPR dataset also includes trajectories that parallel sequences from MulRan, underscoring its utility for research in heterogeneous LiDAR place recognition and long-term studies. The dataset is accessible at https: //sites.google.com/view/heliprdataset.
MSDPN: Monocular Depth Prediction with Partial Laser Observation using Multi-stage Neural Networks
Aug 04, 2020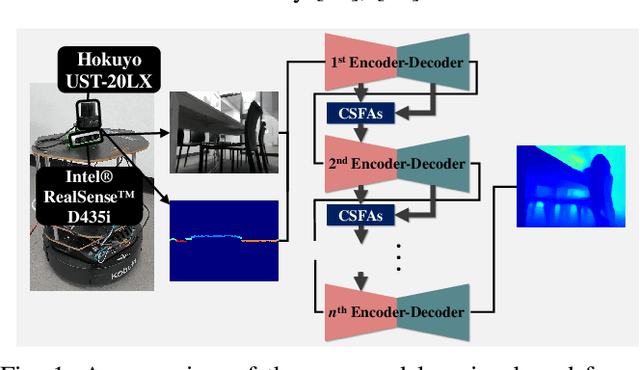

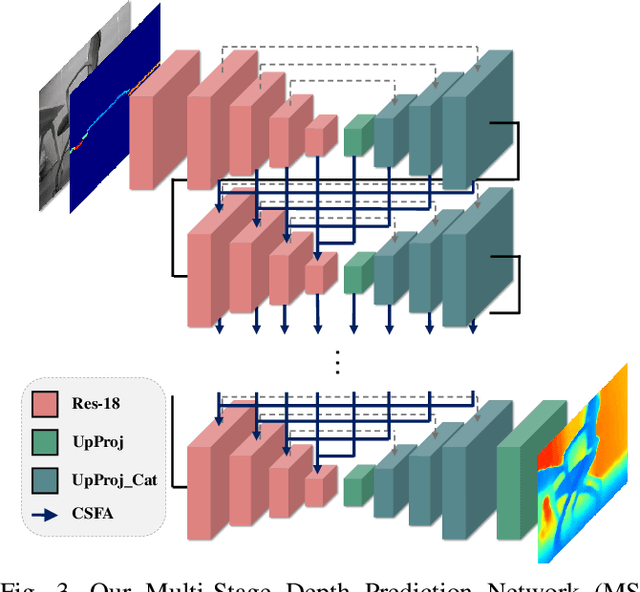
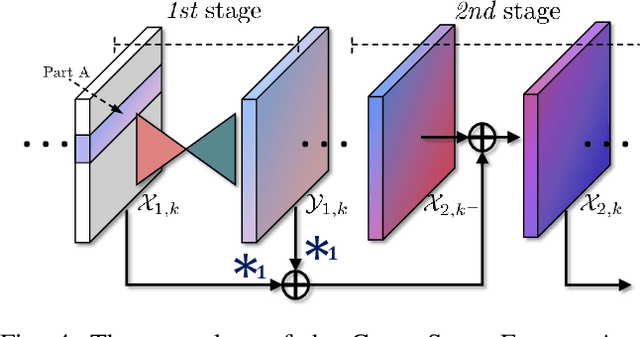
In this study, a deep-learning-based multi-stage network architecture called Multi-Stage Depth Prediction Network (MSDPN) is proposed to predict a dense depth map using a 2D LiDAR and a monocular camera. Our proposed network consists of a multi-stage encoder-decoder architecture and Cross Stage Feature Aggregation (CSFA). The proposed multi-stage encoder-decoder architecture alleviates the partial observation problem caused by the characteristics of a 2D LiDAR, and CSFA prevents the multi-stage network from diluting the features and allows the network to learn the inter-spatial relationship between features better. Previous works use sub-sampled data from the ground truth as an input rather than actual 2D LiDAR data. In contrast, our approach trains the model and conducts experiments with a physically-collected 2D LiDAR dataset. To this end, we acquired our own dataset called KAIST RGBD-scan dataset and validated the effectiveness and the robustness of MSDPN under realistic conditions. As verified experimentally, our network yields promising performance against state-of-the-art methods. Additionally, we analyzed the performance of different input methods and confirmed that the reference depth map is robust in untrained scenarios.