 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegistration beyond Points: General Affine Subspace Alignment via Geodesic Distance on Grassmann Manifold
Jul 24, 2025Affine Grassmannian has been favored for expressing proximity between lines and planes due to its theoretical exactness in measuring distances among features. Despite this advantage, the existing method can only measure the proximity without yielding the distance as an explicit function of rigid body transformation. Thus, an optimizable distance function on the manifold has remained underdeveloped, stifling its application in registration problems. This paper is the first to explicitly derive an optimizable cost function between two Grassmannian features with respect to rigid body transformation ($\mathbf{R}$ and $\mathbf{t}$). Specifically, we present a rigorous mathematical proof demonstrating that the bases of high-dimensional linear subspaces can serve as an explicit representation of the cost. Finally, we propose an optimizable cost function based on the transformed bases that can be applied to the registration problem of any affine subspace. Compared to vector parameter-based approaches, our method is able to find a globally optimal solution by directly minimizing the geodesic distance which is agnostic to representation ambiguity. The resulting cost function and its extension to the inlier-set maximizing \ac{BnB} solver have been demonstrated to improve the convergence of existing solutions or outperform them in various computer vision tasks. The code is available on https://github.com/joomeok/GrassmannRegistration.
PeLiCal: Targetless Extrinsic Calibration via Penetrating Lines for RGB-D Cameras with Limited Co-visibility
Apr 23, 2024
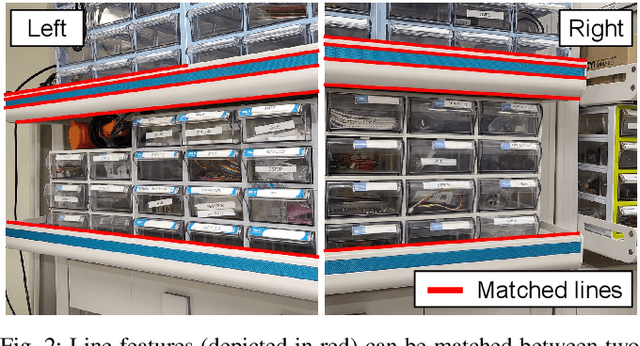


RGB-D cameras are crucial in robotic perception, given their ability to produce images augmented with depth data. However, their limited FOV often requires multiple cameras to cover a broader area. In multi-camera RGB-D setups, the goal is typically to reduce camera overlap, optimizing spatial coverage with as few cameras as possible. The extrinsic calibration of these systems introduces additional complexities. Existing methods for extrinsic calibration either necessitate specific tools or highly depend on the accuracy of camera motion estimation. To address these issues, we present PeLiCal, a novel line-based calibration approach for RGB-D camera systems exhibiting limited overlap. Our method leverages long line features from surroundings, and filters out outliers with a novel convergence voting algorithm, achieving targetless, real-time, and outlier-robust performance compared to existing methods. We open source our implementation on https://github.com/joomeok/PeLiCal.git.
Unbiased Estimator for Distorted Conics in Camera Calibration
Mar 10, 2024In the literature, points and conics have been major features for camera geometric calibration. Although conics are more informative features than points, the loss of the conic property under distortion has critically limited the utility of conic features in camera calibration. Many existing approaches addressed conic-based calibration by ignoring distortion or introducing 3D spherical targets to circumvent this limitation. In this paper, we present a novel formulation for conic-based calibration using moments. Our derivation is based on the mathematical finding that the first moment can be estimated without bias even under distortion. This allows us to track moment changes during projection and distortion, ensuring the preservation of the first moment of the distorted conic. With an unbiased estimator, the circular patterns can be accurately detected at the sub-pixel level and can now be fully exploited for an entire calibration pipeline, resulting in significantly improved calibration. The entire code is readily available from https://github.com/ChaehyeonSong/discocal.
TRansPose: Large-Scale Multispectral Dataset for Transparent Object
Jul 11, 2023



Transparent objects are encountered frequently in our daily lives, yet recognizing them poses challenges for conventional vision sensors due to their unique material properties, not being well perceived from RGB or depth cameras. Overcoming this limitation, thermal infrared cameras have emerged as a solution, offering improved visibility and shape information for transparent objects. In this paper, we present TRansPose, the first large-scale multispectral dataset that combines stereo RGB-D, thermal infrared (TIR) images, and object poses to promote transparent object research. The dataset includes 99 transparent objects, encompassing 43 household items, 27 recyclable trashes, 29 chemical laboratory equivalents, and 12 non-transparent objects. It comprises a vast collection of 333,819 images and 4,000,056 annotations, providing instance-level segmentation masks, ground-truth poses, and completed depth information. The data was acquired using a FLIR A65 thermal infrared (TIR) camera, two Intel RealSense L515 RGB-D cameras, and a Franka Emika Panda robot manipulator. Spanning 87 sequences, TRansPose covers various challenging real-life scenarios, including objects filled with water, diverse lighting conditions, heavy clutter, non-transparent or translucent containers, objects in plastic bags, and multi-stacked objects. TRansPose dataset can be accessed from the following link: https://sites.google.com/view/transpose-dataset
Design and Operation of Autonomous Wheelchair Towing Robot
May 23, 2023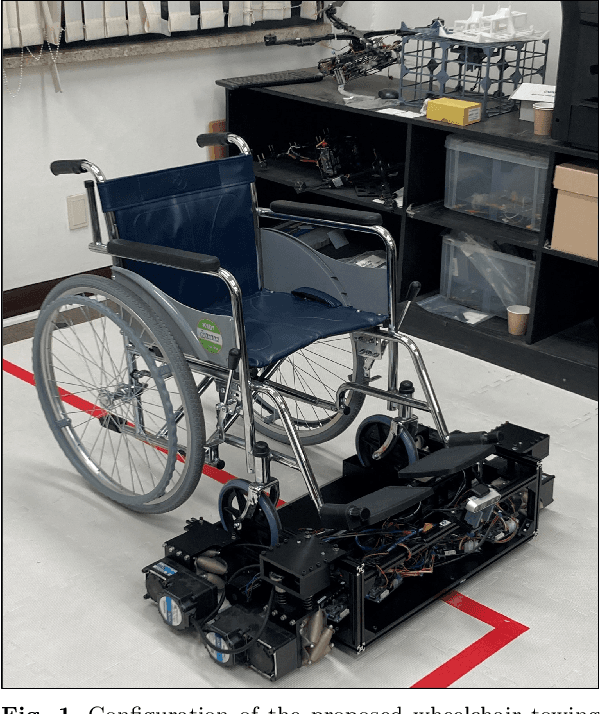


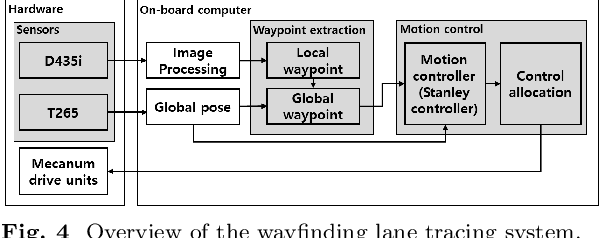
In this study, a new concept of a wheelchair-towing robot for the facile electrification of manual wheelchairs is introduced. The development of this concept includes the design of towing robot hardware and an autonomous driving algorithm to ensure the safe transportation of patients to their intended destinations inside the hospital. We developed a novel docking mechanism to facilitate easy docking and separation between the towing robot and the manual wheelchair, which is connected to the front caster wheel of the manual wheelchair. The towing robot has a mecanum wheel drive, enabling the robot to move with a high degree of freedom in the standalone driving mode while adhering to kinematic constraints in the docking mode. Our novel towing robot features a camera sensor that can observe the ground ahead which allows the robot to autonomously follow color-coded wayfinding lanes installed in hospital corridors. This study introduces dedicated image processing techniques for capturing the lanes and control algorithms for effectively tracing a path to achieve autonomous path following. The autonomous towing performance of our proposed platform was validated by a real-world experiment in which a hospital environment with colored lanes was created.
Incremental Knowledge Base Construction Using DeepDive
Jun 15, 2015



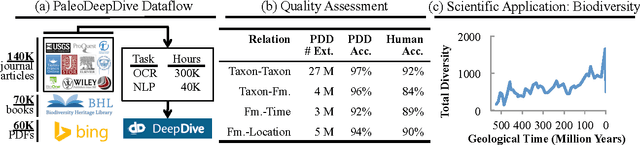
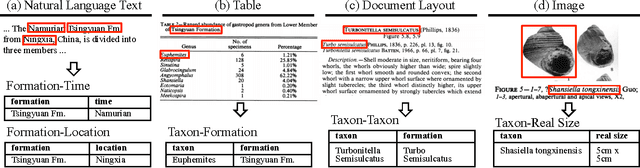
Populating a database with unstructured information is a long-standing problem in industry and research that encompasses problems of extraction, cleaning, and integration. Recent names used for this problem include dealing with dark data and knowledge base construction (KBC). In this work, we describe DeepDive, a system that combines database and machine learning ideas to help develop KBC systems, and we present techniques to make the KBC process more efficient. We observe that the KBC process is iterative, and we develop techniques to incrementally produce inference results for KBC systems. We propose two methods for incremental inference, based respectively on sampling and variational techniques. We also study the tradeoff space of these methods and develop a simple rule-based optimizer. DeepDive includes all of these contributions, and we evaluate DeepDive on five KBC systems, showing that it can speed up KBC inference tasks by up to two orders of magnitude with negligible impact on quality.
Feature Engineering for Knowledge Base Construction
Sep 18, 2014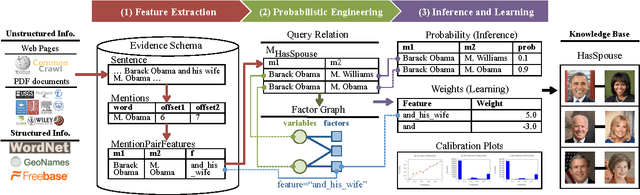
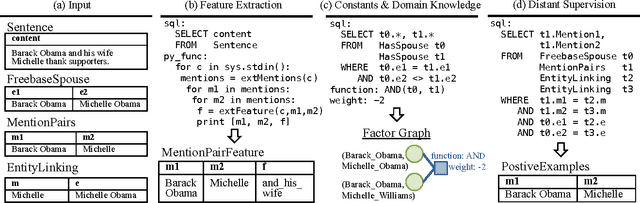
Knowledge base construction (KBC) is the process of populating a knowledge base, i.e., a relational database together with inference rules, with information extracted from documents and structured sources. KBC blurs the distinction between two traditional database problems, information extraction and information integration. For the last several years, our group has been building knowledge bases with scientific collaborators. Using our approach, we have built knowledge bases that have comparable and sometimes better quality than those constructed by human volunteers. In contrast to these knowledge bases, which took experts a decade or more human years to construct, many of our projects are constructed by a single graduate student. Our approach to KBC is based on joint probabilistic inference and learning, but we do not see inference as either a panacea or a magic bullet: inference is a tool that allows us to be systematic in how we construct, debug, and improve the quality of such systems. In addition, inference allows us to construct these systems in a more loosely coupled way than traditional approaches. To support this idea, we have built the DeepDive system, which has the design goal of letting the user "think about features---not algorithms." We think of DeepDive as declarative in that one specifies what they want but not how to get it. We describe our approach with a focus on feature engineering, which we argue is an understudied problem relative to its importance to end-to-end quality.