 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous aerial perching and unperching using omnidirectional tiltrotor and switching controller
Apr 17, 2024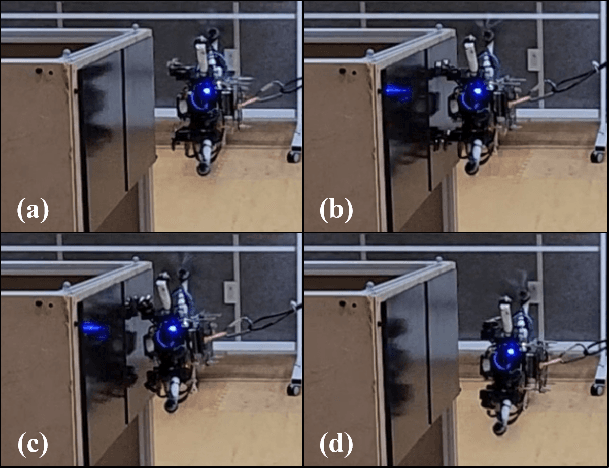
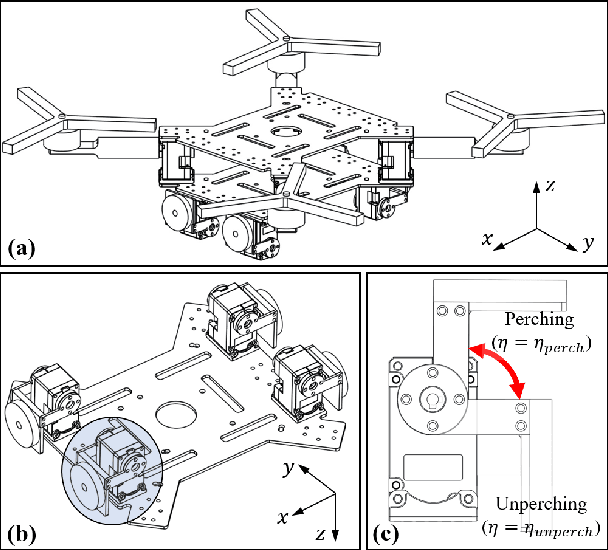
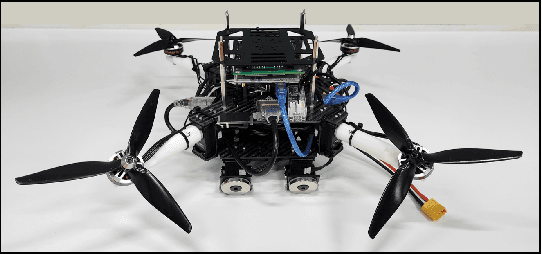
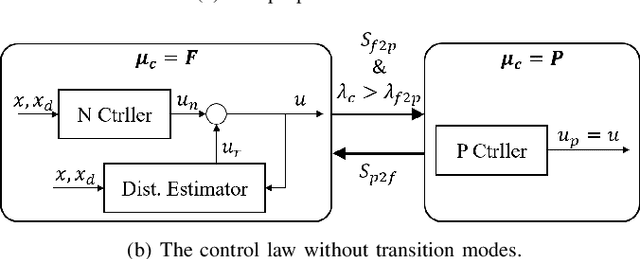
Aerial unperching of multirotors has received little attention as opposed to perching that has been investigated to elongate operation time. This study presents a new aerial robot capable of both perching and unperching autonomously on/from a ferromagnetic surface during flight, and a switching controller to avoid rotor saturation and mitigate overshoot during transition between free-flight and perching. To enable stable perching and unperching maneuvers on/from a vertical surface, a lightweight ($\approx$ $1$ \si{kg}), fully actuated tiltrotor that can hover at $90^\circ$ pitch angle is first developed. We design a perching/unperching module composed of a single servomotor and a magnet, which is then mounted on the tiltrotor. A switching controller including exclusive control modes for transitions between free-flight and perching is proposed. Lastly, we propose a simple yet effective strategy to ensure robust perching in the presence of measurement and control errors and avoid collisions with the perching site immediately after unperching. We validate the proposed framework in experiments where the tiltrotor successfully performs perching and unperching on/from a vertical surface during flight. We further show effectiveness of the proposed transition mode in the switching controller by ablation studies where large overshoot and even collision with a perching site occur. To the best of the authors' knowledge, this work presents the first autonomous aerial unperching framework using a fully actuated tiltrotor.
Minimally actuated tiltrotor for perching and normal force exertion
Jun 26, 2023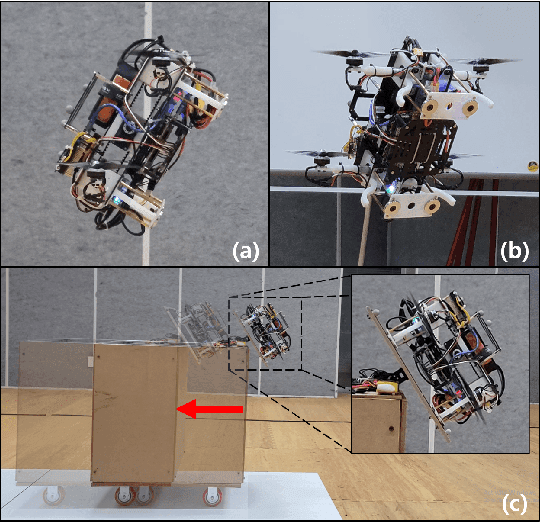

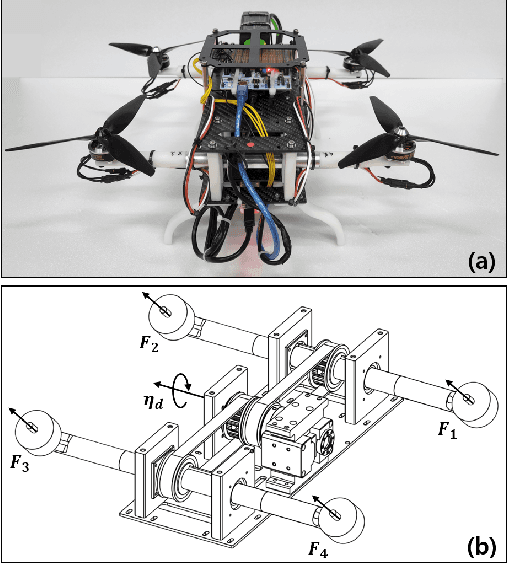
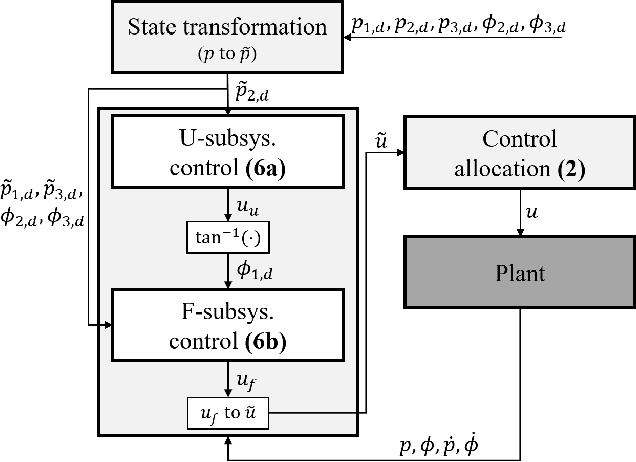
This study presents a new hardware design and control of a minimally actuated 5 control degrees of freedom (CDoF) quadrotor-based tiltrotor. The proposed tiltrotor possesses several characteristics distinct from those found in existing works, including: 1) minimal number of actuators for 5 CDoF, 2) large margin to generate interaction force during aerial physical interaction (APhI), and 3) no mechanical obstruction in thrust direction rotation. Thanks to these properties, the proposed tiltrotor is suitable for perching-enabled APhI since it can hover parallel to an arbitrarily oriented surface and can freely adjust its thrust direction. To fully control the 5-CDoF of the designed tiltrotor, we construct an asymptotically stabilizing controller with stability analysis. The proposed tiltrotor design and controller are validated in experiments where the first two experiments of $x,y$ position tracking and pitch tracking show controllability of the added CDoF compared to a conventional quadrotor. Finally, the last experiment of perching and cart pushing demonstrates the proposed tiltrotor's applicability to perching-enabled APhI.
Design and Operation of Autonomous Wheelchair Towing Robot
May 23, 2023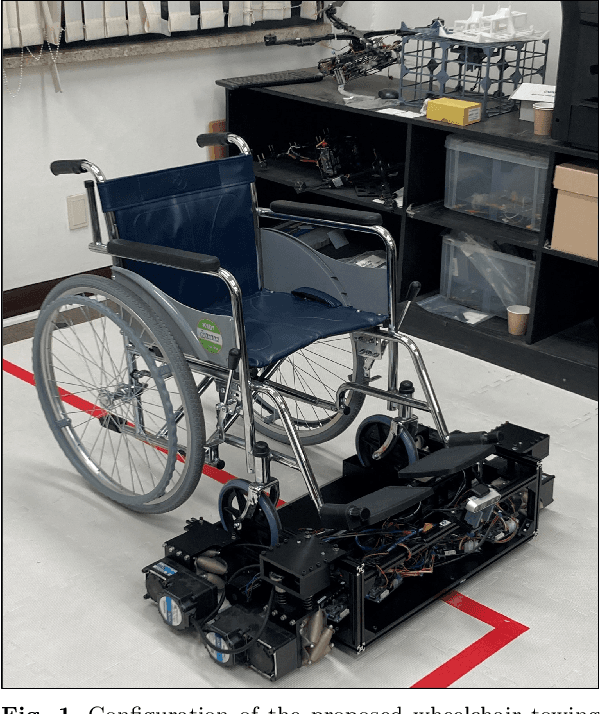


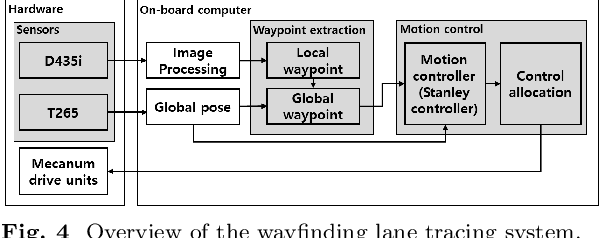
In this study, a new concept of a wheelchair-towing robot for the facile electrification of manual wheelchairs is introduced. The development of this concept includes the design of towing robot hardware and an autonomous driving algorithm to ensure the safe transportation of patients to their intended destinations inside the hospital. We developed a novel docking mechanism to facilitate easy docking and separation between the towing robot and the manual wheelchair, which is connected to the front caster wheel of the manual wheelchair. The towing robot has a mecanum wheel drive, enabling the robot to move with a high degree of freedom in the standalone driving mode while adhering to kinematic constraints in the docking mode. Our novel towing robot features a camera sensor that can observe the ground ahead which allows the robot to autonomously follow color-coded wayfinding lanes installed in hospital corridors. This study introduces dedicated image processing techniques for capturing the lanes and control algorithms for effectively tracing a path to achieve autonomous path following. The autonomous towing performance of our proposed platform was validated by a real-world experiment in which a hospital environment with colored lanes was created.
Design, Modeling and Control of a Top-loading Fully-Actuated Cargo Transportation Multirotor
Jan 17, 2023



Existing multirotor-based cargo transportation does not maintain a constant cargo attitude due to underactuation; however, fragile payloads may require a consistent posture. The conventional method is also cumbersome when loading cargo, and the size of the cargo to be loaded is limited. To overcome these issues, we propose a new fully-actuated multirotor unmanned aerial vehicle platform capable of translational motion while maintaining a constant attitude. Our newly developed platform has a cubic exterior and can freely place cargo at any point on the flat top surface. However, the center-of-mass (CoM) position changes when cargo is loaded, leading to undesired attitudinal motion due to unwanted torque generation. To address this problem, we introduce a new model-free center-of-mass position estimation method inspired by the extremum-seeking control (ESC) technique. Experimental results are presented to validate the performance of the proposed estimation method, effectively estimating the CoM position and showing satisfactory constant-attitude flight performance.
Supporting Massive DLRM Inference Through Software Defined Memory
Nov 08, 2021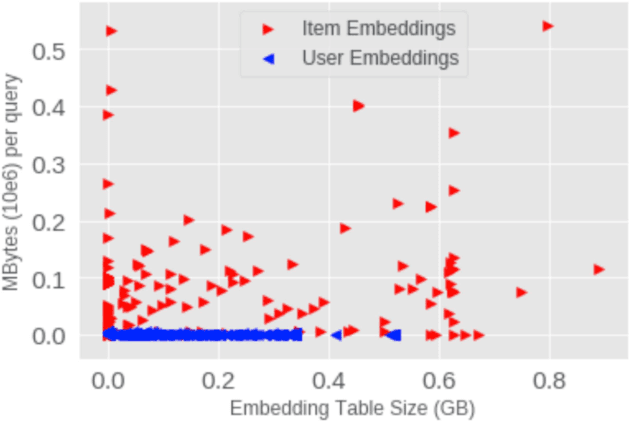
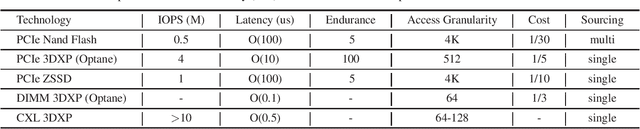
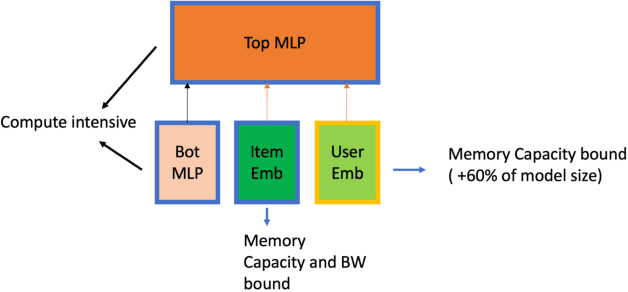
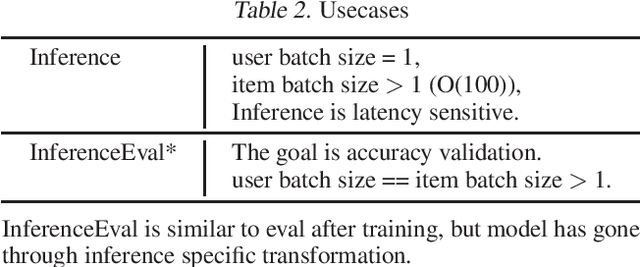
Deep Learning Recommendation Models (DLRM) are widespread, account for a considerable data center footprint, and grow by more than 1.5x per year. With model size soon to be in terabytes range, leveraging Storage ClassMemory (SCM) for inference enables lower power consumption and cost. This paper evaluates the major challenges in extending the memory hierarchy to SCM for DLRM, and presents different techniques to improve performance through a Software Defined Memory. We show how underlying technologies such as Nand Flash and 3DXP differentiate, and relate to real world scenarios, enabling from 5% to 29% power savings.
Autonomous Flight through Cluttered Outdoor Environments Using a Memoryless Planner
Mar 22, 2021
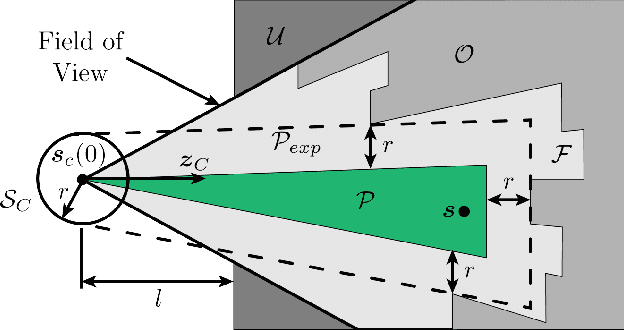
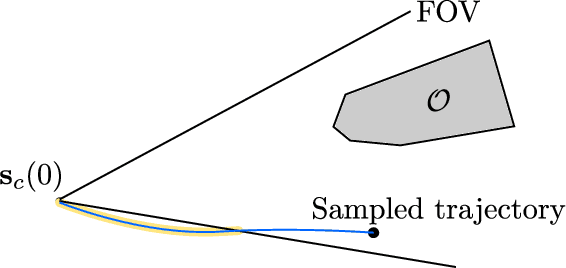
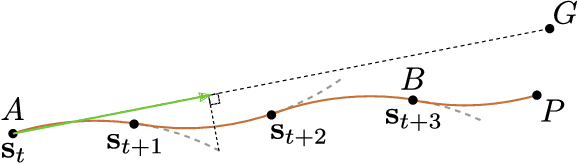
This paper introduces a collision avoidance system for navigating a multicopter in cluttered outdoor environments based on the recent memory-less motion planner, rectangular pyramid partitioning using integrated depth sensors (RAPPIDS). The RAPPIDS motion planner generates collision-free flight trajectories at high speed with low computational cost using only the latest depth image. In this work we extend it to improve the performance of the planner by taking the following issues into account. (a) Changes in the dynamic characteristics of the multicopter that occur during flight, such as changes in motor input/output characteristics due to battery voltage drop. (b) The noise of the flight sensor, which can cause unwanted control input components. (c) Planner utility function which may not be suitable for the cluttered environment. Therefore, in this paper we introduce solutions to each of the above problems and propose a system for the successful operation of the RAPPIDS planner in an outdoor cluttered flight environment. At the end of the paper, we validate the proposed method's effectiveness by presenting the flight experiment results in a forest environment. A video can be found at www.youtube.com/channel/UCK-gErmvZlBODN5gQpNcpsg
Fail-safe Flight of a Fully-Actuated Quadcopter in a Single Motor Failure
Feb 26, 2020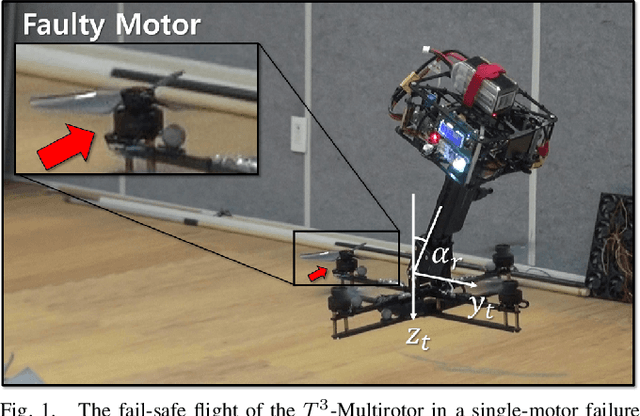
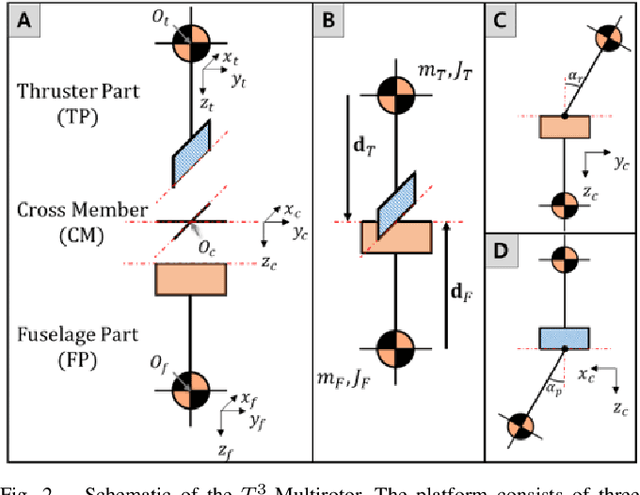
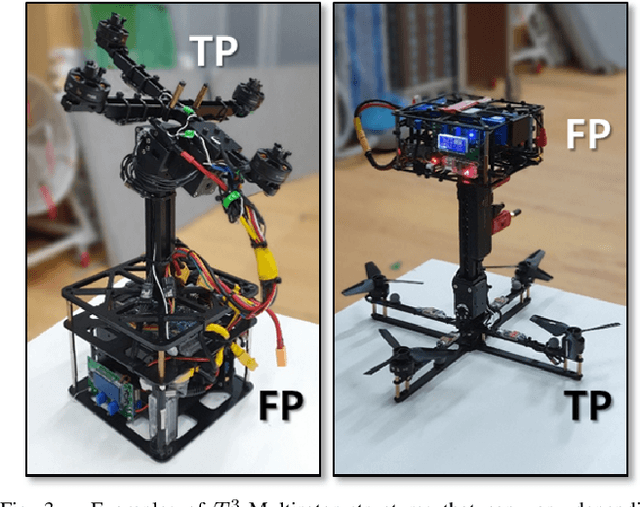
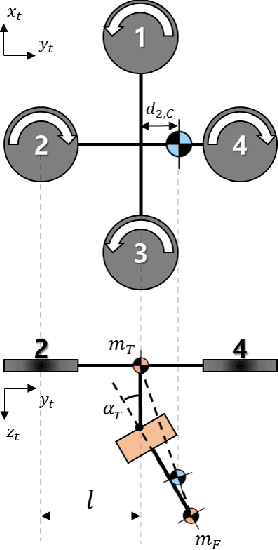
In this paper, we introduce a new quadcopter fail-safe flight solution that can perform the same four controllable degrees-of-freedom flight as a regular multirotor even when a single thruster fails. The new solution employs a novel multirotor platform known as the T3-Multirotor and utilizes a distinctive strategy of actively controlling the center of gravity position to restore the nominal flight performance. A dedicated control structure is introduced, along with a detailed analysis of the dynamic characteristics of the platform that change during emergency flights. Experimental results are provided to validate the feasibility of the proposed fail-safe flight strategy.
Robust Translational Force Control of Multi-Rotor UAV for Precise Acceleration Tracking
Aug 14, 2019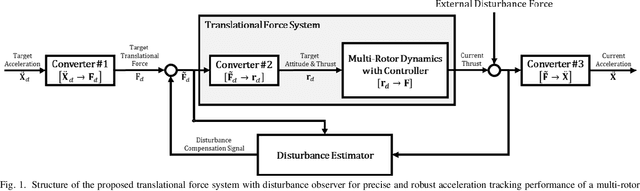
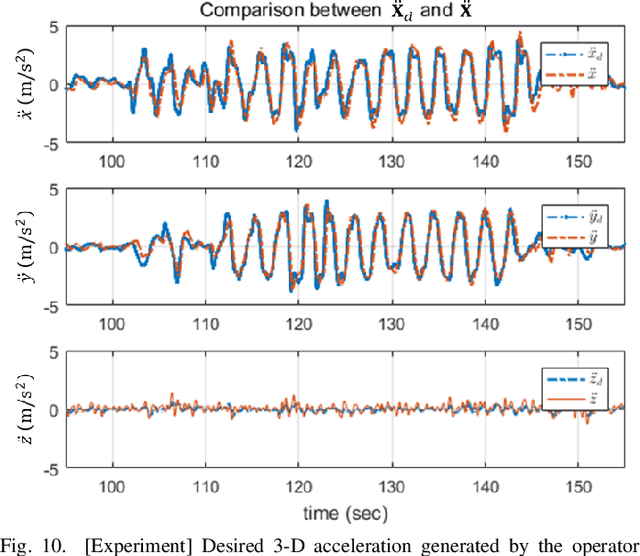
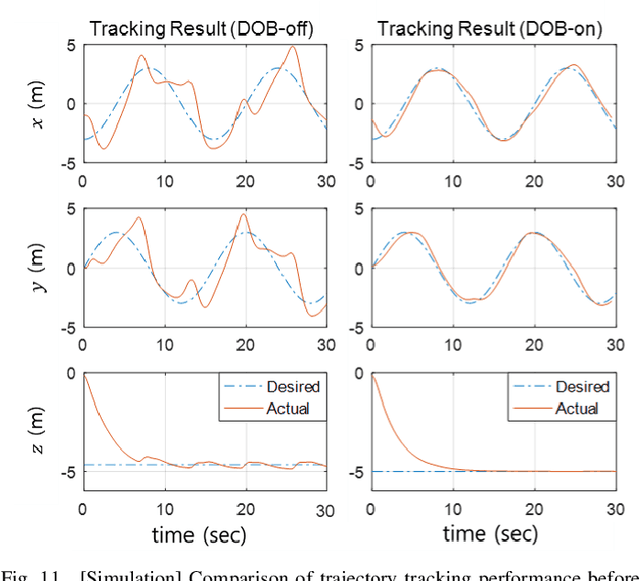
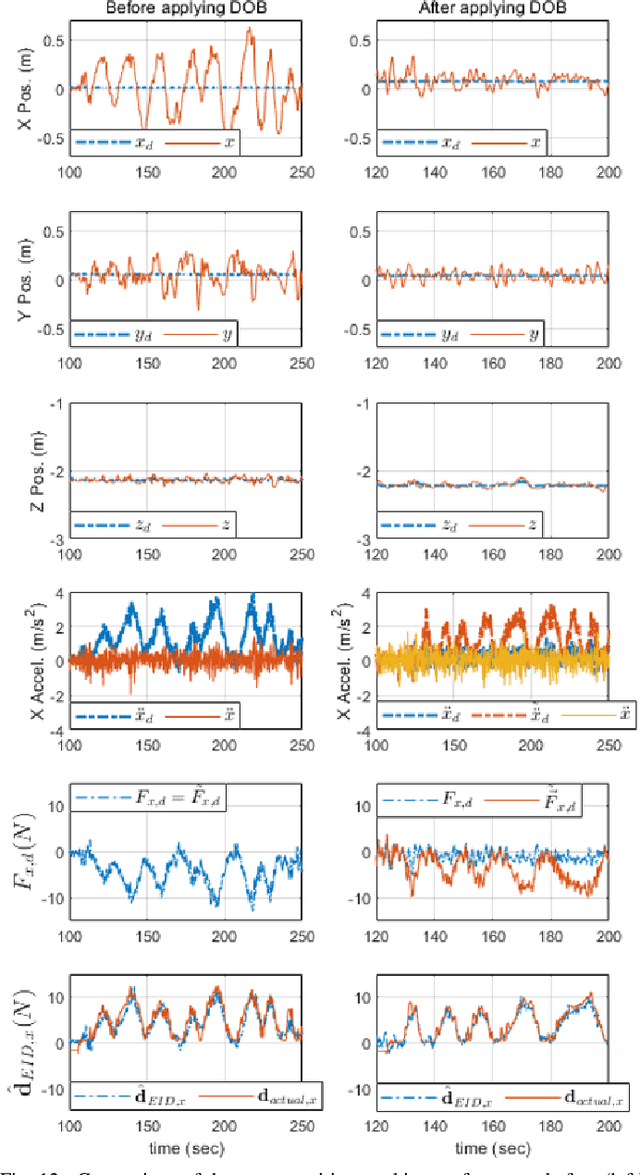
In this paper, we introduce a translational force control method with disturbance observer (DOB)-based force disturbance cancellation for precise three-dimensional acceleration control of a multi-rotor UAV. The acceleration control of the multi-rotor requires conversion of the desired acceleration signal to the desired roll, pitch, and total thrust. But because the attitude dynamics and the thrust dynamics are different, simple kinematic signal conversion without consideration of those difference can cause serious performance degradation in acceleration tracking. Unlike most existing translational force control techniques that are based on such simple inversion, our new method allows controlling the acceleration of the multi-rotor more precisely by considering the dynamics of the multi-rotor during the kinematic inversion. By combining the DOB with the translational force system that includes the improved conversion technique, we achieve robustness with respect to the external force disturbances that hinders the accurate acceleration control. mu-analysis is performed to ensure the robust stability of the overall closed-loop system, considering the combined effect of various possible model uncertainties. Both simulation and experiment are conducted to validate the proposed technique, which confirms the satisfactory performance to track the desired acceleration of the multi-rotor.
Feature Forwarding for Efficient Single Image Dehazing
May 03, 2019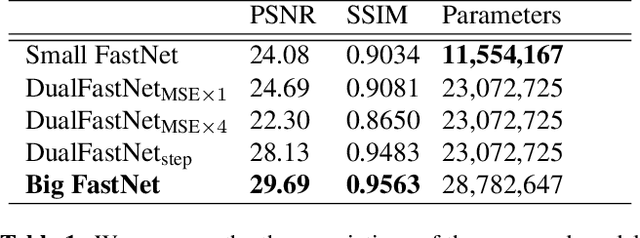
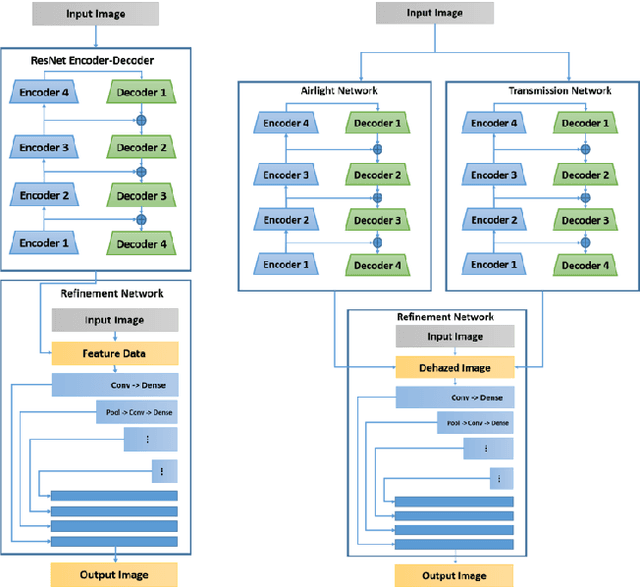
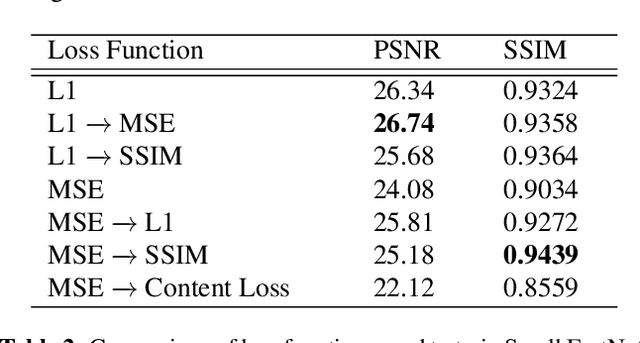

Haze degrades content and obscures information of images, which can negatively impact vision-based decision-making in real-time systems. In this paper, we propose an efficient fully convolutional neural network (CNN) image dehazing method designed to run on edge graphical processing units (GPUs). We utilize three variants of our architecture to explore the dependency of dehazed image quality on parameter count and model design. The first two variants presented, a small and big version, make use of a single efficient encoder-decoder convolutional feature extractor. The final variant utilizes a pair of encoder-decoders for atmospheric light and transmission map estimation. Each variant ends with an image refinement pyramid pooling network to form the final dehazed image. For the big variant of the single-encoder network, we demonstrate state-of-the-art performance on the NYU Depth dataset. For the small variant, we maintain competitive performance on the super-resolution O/I-HAZE datasets without the need for image cropping. Finally, we examine some challenges presented by the Dense-Haze dataset when leveraging CNN architectures for dehazing of dense haze imagery and examine the impact of loss function selection on image quality. Benchmarks are included to show the feasibility of introducing this approach into real-time systems.