 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-supervised Learning with Local Contrastive Loss for Detection and Semantic Segmentation
Jul 10, 2022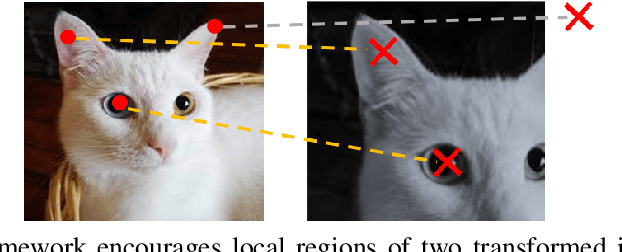
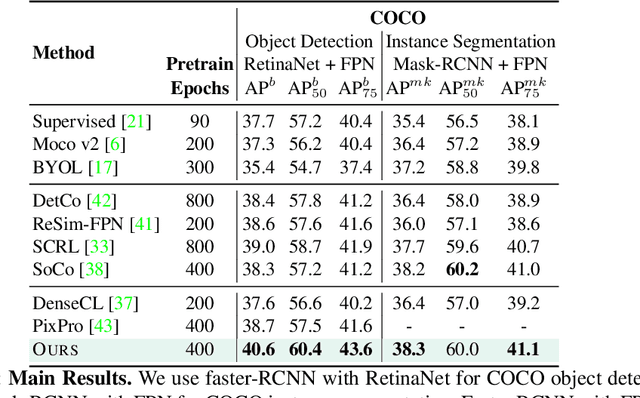
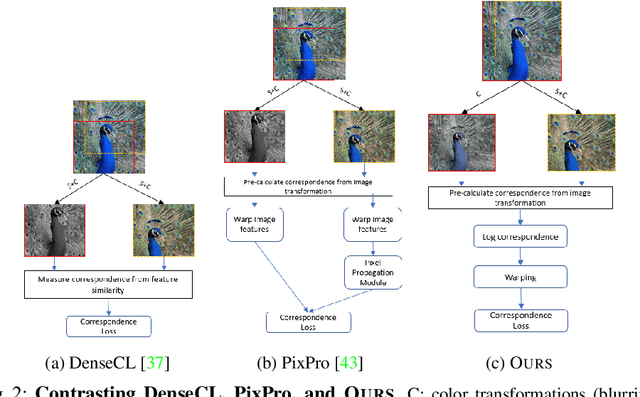
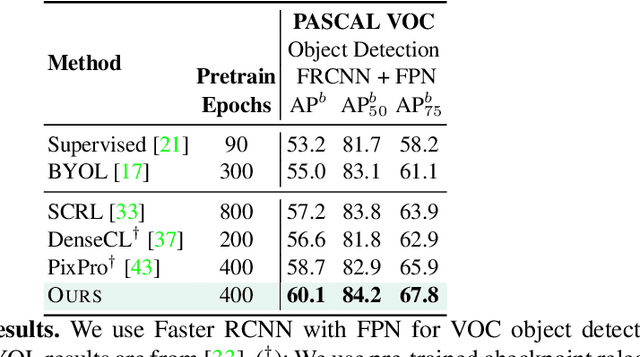
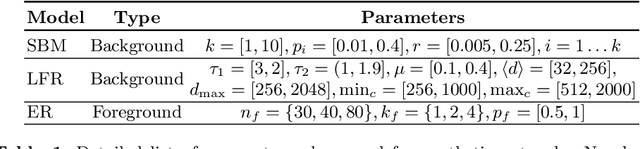
We present a self-supervised learning (SSL) method suitable for semi-global tasks such as object detection and semantic segmentation. We enforce local consistency between self-learned features, representing corresponding image locations of transformed versions of the same image, by minimizing a pixel-level local contrastive (LC) loss during training. LC-loss can be added to existing self-supervised learning methods with minimal overhead. We evaluate our SSL approach on two downstream tasks -- object detection and semantic segmentation, using COCO, PASCAL VOC, and CityScapes datasets. Our method outperforms the existing state-of-the-art SSL approaches by 1.9% on COCO object detection, 1.4% on PASCAL VOC detection, and 0.6% on CityScapes segmentation.
Scalable Anytime Planning for Multi-Agent MDPs
Jan 12, 2021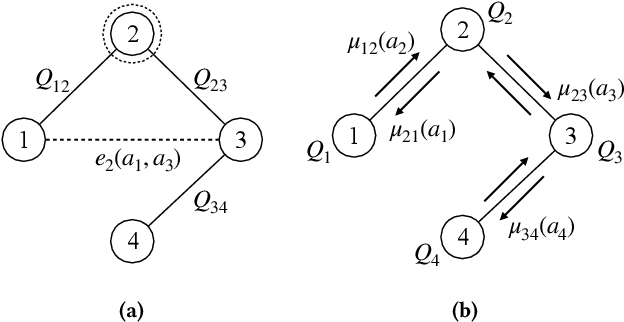
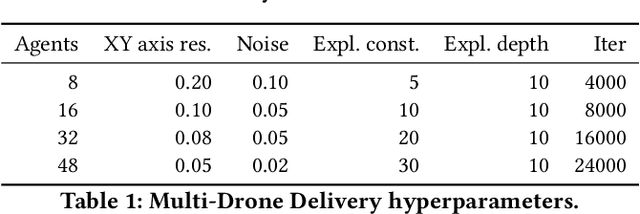
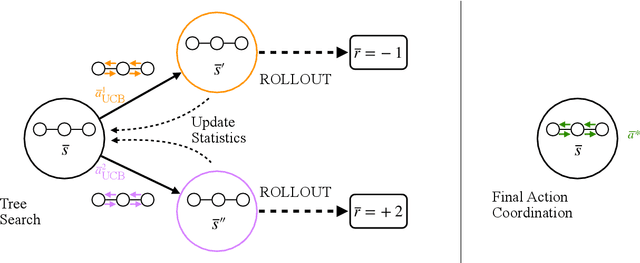
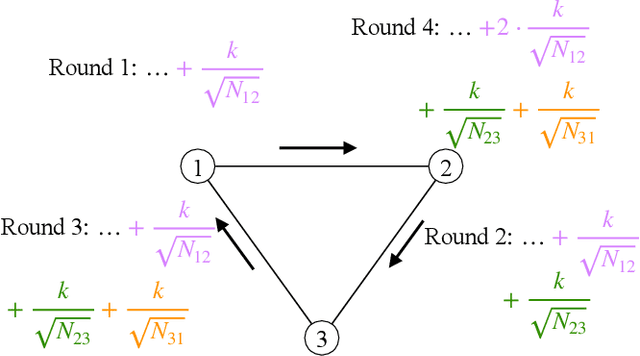
We present a scalable tree search planning algorithm for large multi-agent sequential decision problems that require dynamic collaboration. Teams of agents need to coordinate decisions in many domains, but naive approaches fail due to the exponential growth of the joint action space with the number of agents. We circumvent this complexity through an anytime approach that allows us to trade computation for approximation quality and also dynamically coordinate actions. Our algorithm comprises three elements: online planning with Monte Carlo Tree Search (MCTS), factored representations of local agent interactions with coordination graphs, and the iterative Max-Plus method for joint action selection. We evaluate our approach on the benchmark SysAdmin domain with static coordination graphs and achieve comparable performance with much lower computation cost than our MCTS baselines. We also introduce a multi-drone delivery domain with dynamic, i.e., state-dependent coordination graphs, and demonstrate how our approach scales to large problems on this domain that are intractable for other MCTS methods. We provide an open-source implementation of our algorithm at https://github.com/JuliaPOMDP/FactoredValueMCTS.jl.
Signal Enhancement for Magnetic Navigation Challenge Problem
Jul 23, 2020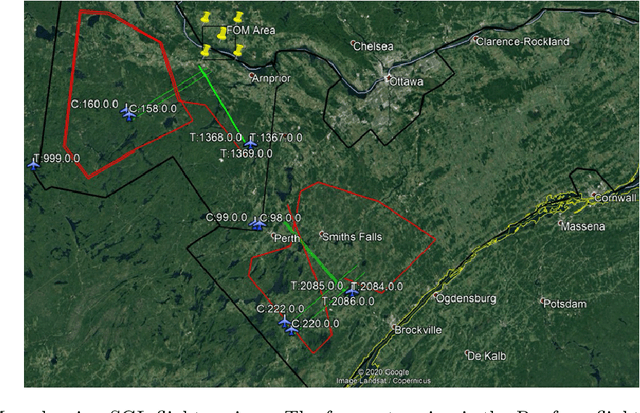
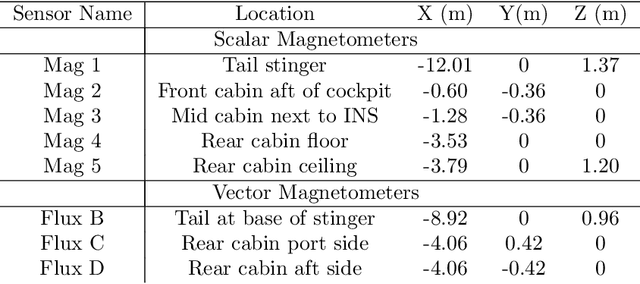
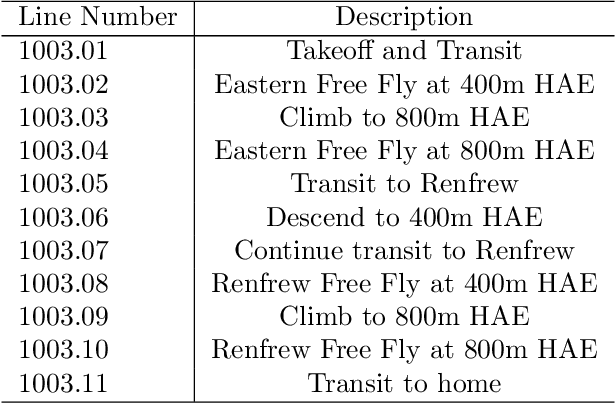
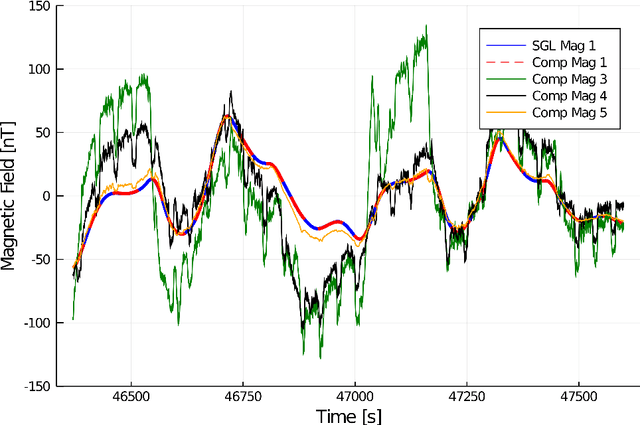
Harnessing the magnetic field of the earth for navigation has shown promise as a viable alternative to other navigation systems. A magnetic navigation system collects its own magnetic field data using a magnetometer and uses magnetic anomaly maps to determine the current location. The greatest challenge with magnetic navigation arises when the magnetic field data from the magnetometer on the navigation system encompass the magnetic field from not just the earth, but also from the vehicle on which it is mounted. It is difficult to separate the earth magnetic anomaly field magnitude, which is crucial for navigation, from the total magnetic field magnitude reading from the sensor. The purpose of this challenge problem is to decouple the earth and aircraft magnetic signals in order to derive a clean signal from which to perform magnetic navigation. Baseline testing on the dataset shows that the earth magnetic field can be extracted from the total magnetic field using machine learning (ML). The challenge is to remove the aircraft magnetic field from the total magnetic field using a trained neural network. These challenges offer an opportunity to construct an effective neural network for removing the aircraft magnetic field from the dataset, using an ML algorithm integrated with physics of magnetic navigation.
Deep Implicit Coordination Graphs for Multi-agent Reinforcement Learning
Jun 19, 2020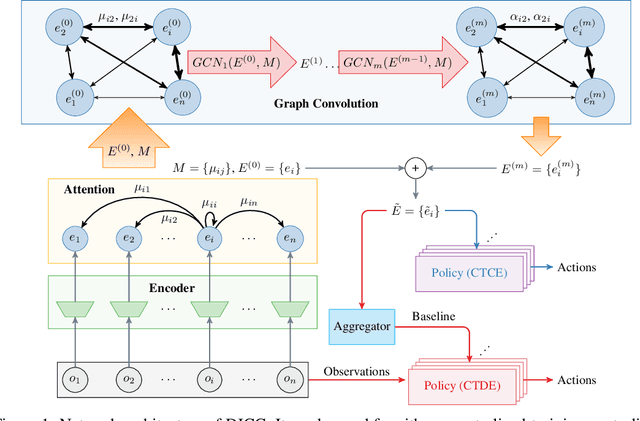
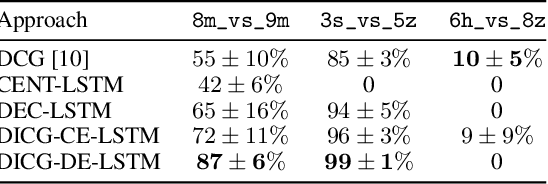
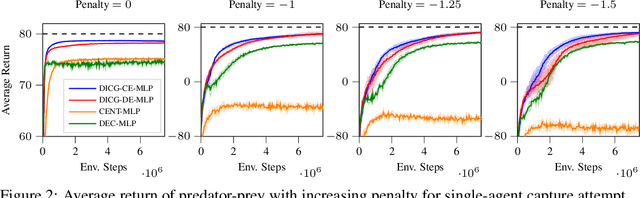
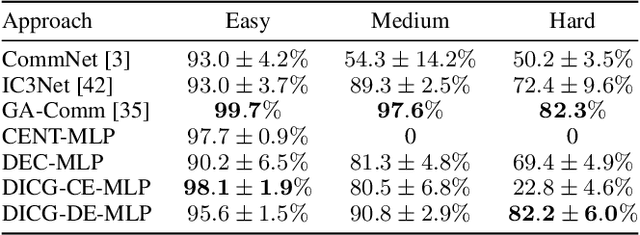
Multi-agent reinforcement learning (MARL) requires coordination to efficiently solve certain tasks. Fully centralized control is often infeasible in such domains due to the size of joint action spaces. Coordination graph based formalization allows reasoning about the joint action based on the structure of interactions. However, they often require domain expertise in their design. This paper introduces the deep implicit coordination graph (DICG) architecture for such scenarios. DICG consists of a module for inferring the dynamic coordination graph structure which is then used by a graph neural network based module to learn to implicitly reason about the joint actions or values. DICG allows learning the tradeoff between full centralization and decentralization via standard actor-critic methods to significantly improve coordination for domains with large number of agents. We apply DICG to both centralized-training-centralized-execution and centralized-training-decentralized-execution regimes. We demonstrate that DICG solves the relative overgeneralization pathology in predatory-prey tasks as well as outperforms various MARL baselines on the challenging StarCraft II Multi-agent Challenge (SMAC) and traffic junction environments.
Towards Recurrent Autoregressive Flow Models
Jun 17, 2020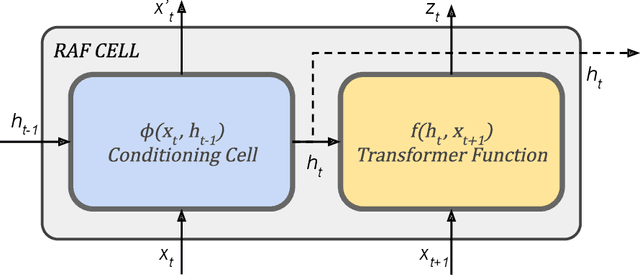
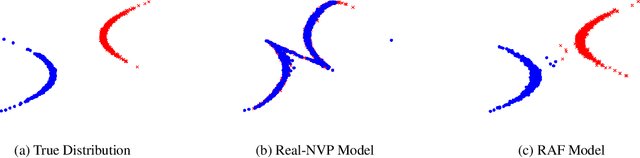
Stochastic processes generated by non-stationary distributions are difficult to represent with conventional models such as Gaussian processes. This work presents Recurrent Autoregressive Flows as a method toward general stochastic process modeling with normalizing flows. The proposed method defines a conditional distribution for each variable in a sequential process by conditioning the parameters of a normalizing flow with recurrent neural connections. Complex conditional relationships are learned through the recurrent network parameters. In this work, we present an initial design for a recurrent flow cell and a method to train the model to match observed empirical distributions. We demonstrate the effectiveness of this class of models through a series of experiments in which models are trained on three complex stochastic processes. We highlight the shortcomings of our current formulation and suggest some potential solutions.
Self-Supervised Feature Extraction for 3D Axon Segmentation
Apr 20, 2020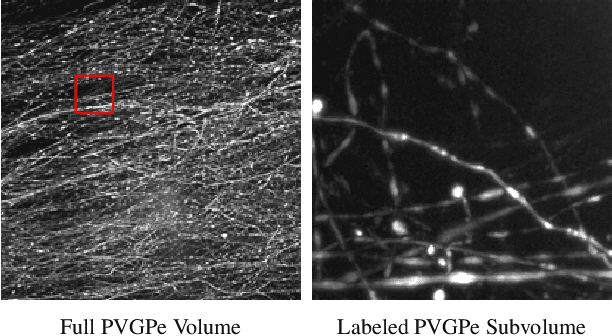
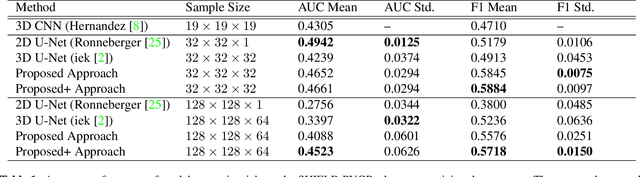
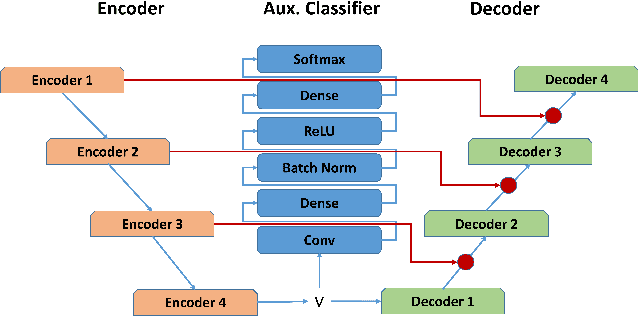

Existing learning-based methods to automatically trace axons in 3D brain imagery often rely on manually annotated segmentation labels. Labeling is a labor-intensive process and is not scalable to whole-brain analysis, which is needed for improved understanding of brain function. We propose a self-supervised auxiliary task that utilizes the tube-like structure of axons to build a feature extractor from unlabeled data. The proposed auxiliary task constrains a 3D convolutional neural network (CNN) to predict the order of permuted slices in an input 3D volume. By solving this task, the 3D CNN is able to learn features without ground-truth labels that are useful for downstream segmentation with the 3D U-Net model. To the best of our knowledge, our model is the first to perform automated segmentation of axons imaged at subcellular resolution with the SHIELD technique. We demonstrate improved segmentation performance over the 3D U-Net model on both the SHIELD PVGPe dataset and the BigNeuron Project, single neuron Janelia dataset.
Deep Reinforcement Learning for Task-driven Discovery of Incomplete Networks
Sep 16, 2019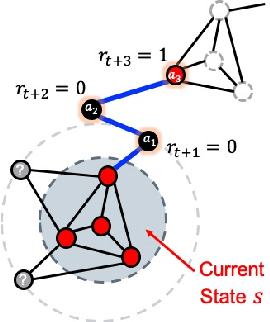


Complex networks are often either too large for full exploration, partially accessible or partially observed. Downstream learning tasks on incomplete networks can produce low quality results. In addition, reducing the incompleteness of the network can be costly and nontrivial. As a result, network discovery algorithms optimized for specific downstream learning tasks and given resource collection constraints are of great interest. In this paper we formulate the task-specific network discovery problem in an incomplete network setting as a sequential decision making problem. Our downstream task is vertex classification.We propose a framework, called Network Actor Critic (NAC), which learns concepts of policy and reward in an offline setting via a deep reinforcement learning algorithm. A quantitative study is presented on several synthetic and real benchmarks. We show that offline models of reward and network discovery policies lead to significantly improved performance when compared to competitive online discovery algorithms.
Feature Forwarding for Efficient Single Image Dehazing
May 03, 2019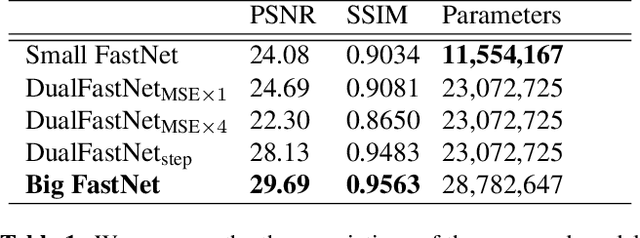
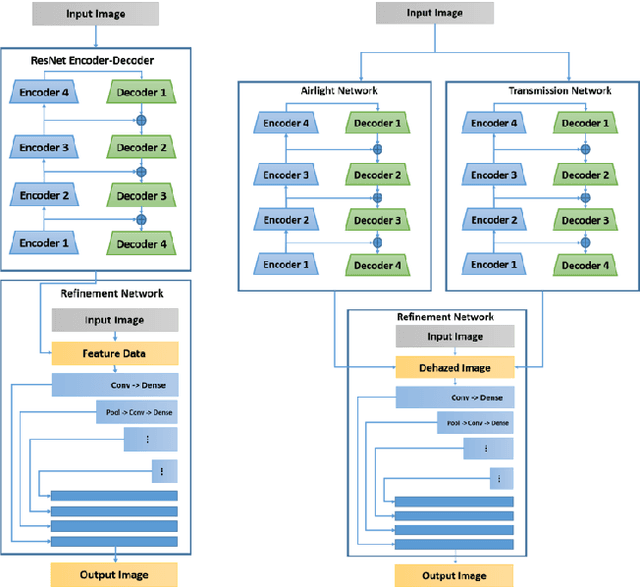
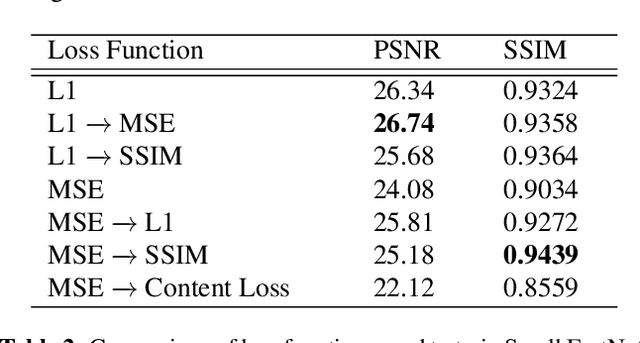

Haze degrades content and obscures information of images, which can negatively impact vision-based decision-making in real-time systems. In this paper, we propose an efficient fully convolutional neural network (CNN) image dehazing method designed to run on edge graphical processing units (GPUs). We utilize three variants of our architecture to explore the dependency of dehazed image quality on parameter count and model design. The first two variants presented, a small and big version, make use of a single efficient encoder-decoder convolutional feature extractor. The final variant utilizes a pair of encoder-decoders for atmospheric light and transmission map estimation. Each variant ends with an image refinement pyramid pooling network to form the final dehazed image. For the big variant of the single-encoder network, we demonstrate state-of-the-art performance on the NYU Depth dataset. For the small variant, we maintain competitive performance on the super-resolution O/I-HAZE datasets without the need for image cropping. Finally, we examine some challenges presented by the Dense-Haze dataset when leveraging CNN architectures for dehazing of dense haze imagery and examine the impact of loss function selection on image quality. Benchmarks are included to show the feasibility of introducing this approach into real-time systems.