 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Synoptic Review of High-Frequency Oscillations as a Biomarker in Neurodegenerative Disease
Aug 27, 2025High Frequency Oscillations (HFOs), rapid bursts of brain activity above 80 Hz, have emerged as a highly specific biomarker for epileptogenic tissue. Recent evidence suggests that HFOs are also present in Alzheimer's Disease (AD), reflecting underlying network hyperexcitability and offering a promising, noninvasive tool for early diagnosis and disease tracking. This synoptic review provides a comprehensive analysis of publicly available electroencephalography (EEG) datasets relevant to HFO research in neurodegenerative disorders. We conducted a bibliometric analysis of 1,222 articles, revealing a significant and growing research interest in HFOs, particularly within the last ten years. We then systematically profile and compare key public datasets, evaluating their participant cohorts, data acquisition parameters, and accessibility, with a specific focus on their technical suitability for HFO analysis. Our comparative synthesis highlights critical methodological heterogeneity across datasets, particularly in sampling frequency and recording paradigms, which poses challenges for cross-study validation, but also offers opportunities for robustness testing. By consolidating disparate information, clarifying nomenclature, and providing a detailed methodological framework, this review serves as a guide for researchers aiming to leverage public data to advance the role of HFOs as a cross-disease biomarker for AD and related conditions.
Artificial Intelligence for Personalized Prediction of Alzheimer's Disease Progression: A Survey of Methods, Data Challenges, and Future Directions
Apr 29, 2025

Alzheimer's Disease (AD) is marked by significant inter-individual variability in its progression, complicating accurate prognosis and personalized care planning. This heterogeneity underscores the critical need for predictive models capable of forecasting patient-specific disease trajectories. Artificial Intelligence (AI) offers powerful tools to address this challenge by analyzing complex, multi-modal, and longitudinal patient data. This paper provides a comprehensive survey of AI methodologies applied to personalized AD progression prediction. We review key approaches including state-space models for capturing temporal dynamics, deep learning techniques like Recurrent Neural Networks for sequence modeling, Graph Neural Networks (GNNs) for leveraging network structures, and the emerging concept of AI-driven digital twins for individualized simulation. Recognizing that data limitations often impede progress, we examine common challenges such as high dimensionality, missing data, and dataset imbalance. We further discuss AI-driven mitigation strategies, with a specific focus on synthetic data generation using Variational Autoencoders (VAEs) and Generative Adversarial Networks (GANs) to augment and balance datasets. The survey synthesizes the strengths and limitations of current approaches, emphasizing the trend towards multimodal integration and the persistent need for model interpretability and generalizability. Finally, we identify critical open challenges, including robust external validation, clinical integration, and ethical considerations, and outline promising future research directions such as hybrid models, causal inference, and federated learning. This review aims to consolidate current knowledge and guide future efforts in developing clinically relevant AI tools for personalized AD prognostication.
T2ID-CAS: Diffusion Model and Class Aware Sampling to Mitigate Class Imbalance in Neck Ultrasound Anatomical Landmark Detection
Apr 29, 2025



Neck ultrasound (US) plays a vital role in airway management by providing non-invasive, real-time imaging that enables rapid and precise interventions. Deep learning-based anatomical landmark detection in neck US can further facilitate procedural efficiency. However, class imbalance within datasets, where key structures like tracheal rings and vocal folds are underrepresented, presents significant challenges for object detection models. To address this, we propose T2ID-CAS, a hybrid approach that combines a text-to-image latent diffusion model with class-aware sampling to generate high-quality synthetic samples for underrepresented classes. This approach, rarely explored in the ultrasound domain, improves the representation of minority classes. Experimental results using YOLOv9 for anatomical landmark detection in neck US demonstrated that T2ID-CAS achieved a mean Average Precision of 88.2, significantly surpassing the baseline of 66. This highlights its potential as a computationally efficient and scalable solution for mitigating class imbalance in AI-assisted ultrasound-guided interventions.
Point Cloud Context Analysis for Rehabilitation Grasping Assistance
Nov 12, 2024Controlling hand exoskeletons for assisting impaired patients in grasping tasks is challenging because it is difficult to infer user intent. We hypothesize that majority of daily grasping tasks fall into a small set of categories or modes which can be inferred through real-time analysis of environmental geometry from 3D point clouds. This paper presents a low-cost, real-time system for semantic image labeling of household scenes with the objective to inform and assist activities of daily living. The system consists of a miniature depth camera, an inertial measurement unit and a microprocessor. It is able to achieve 85% or higher accuracy at classification of predefined modes while processing complex 3D scenes at over 30 frames per second. Within each mode it can detect and localize graspable objects. Grasping points can be correctly estimated on average within 1 cm for simple object geometries. The system has potential applications in robotic-assisted rehabilitation as well as manual task assistance.
Improved Topological Preservation in 3D Axon Segmentation and Centerline Detection using Geometric Assessment-driven Topological Smoothing (GATS)
Nov 07, 2023



Automated axon tracing via fully supervised learning requires large amounts of 3D brain imagery, which is time consuming and laborious to obtain. It also requires expertise. Thus, there is a need for more efficient segmentation and centerline detection techniques to use in conjunction with automated annotation tools. Topology-preserving methods ensure that segmented components maintain geometric connectivity, which is especially meaningful for applications where volumetric data is used, and these methods often make use of morphological thinning algorithms as the thinned outputs can be useful for both segmentation and centerline detection of curvilinear structures. Current morphological thinning approaches used in conjunction with topology-preserving methods are prone to over-thinning and require manual configuration of hyperparameters. We propose an automated approach for morphological smoothing using geometric assessment of the radius of tubular structures in brain microscopy volumes, and apply average pooling to prevent over-thinning. We use this approach to formulate a loss function, which we call Geo-metric Assessment-driven Topological Smoothing loss, or GATS. Our approach increased segmentation and center-line detection evaluation metrics by 2%-5% across multiple datasets, and improved the Betti error rates by 9%. Our ablation study showed that geometric assessment of tubular structures achieved higher segmentation and centerline detection scores, and using average pooling for morphological smoothing in place of thinning algorithms reduced the Betti errors. We observed increased topological preservation during automated annotation of 3D axons volumes from models trained with GATS.
Developing a Series of AI Challenges for the United States Department of the Air Force
Jul 14, 2022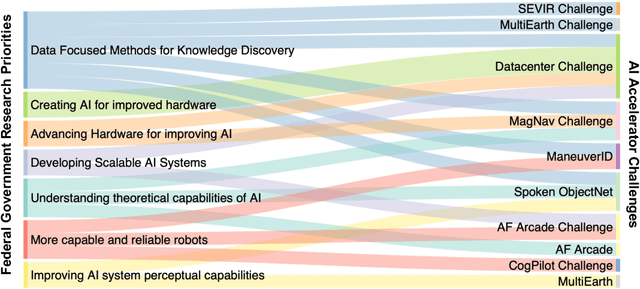
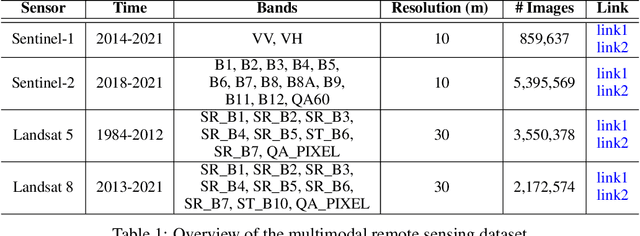
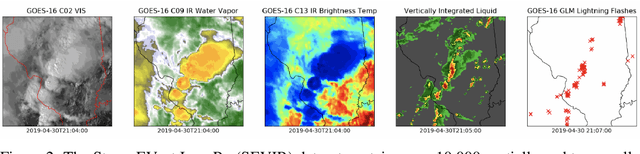
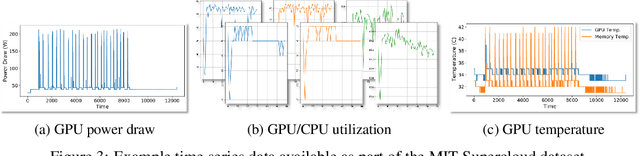
Through a series of federal initiatives and orders, the U.S. Government has been making a concerted effort to ensure American leadership in AI. These broad strategy documents have influenced organizations such as the United States Department of the Air Force (DAF). The DAF-MIT AI Accelerator is an initiative between the DAF and MIT to bridge the gap between AI researchers and DAF mission requirements. Several projects supported by the DAF-MIT AI Accelerator are developing public challenge problems that address numerous Federal AI research priorities. These challenges target priorities by making large, AI-ready datasets publicly available, incentivizing open-source solutions, and creating a demand signal for dual use technologies that can stimulate further research. In this article, we describe these public challenges being developed and how their application contributes to scientific advances.
Self-Supervised Feature Extraction for 3D Axon Segmentation
Apr 20, 2020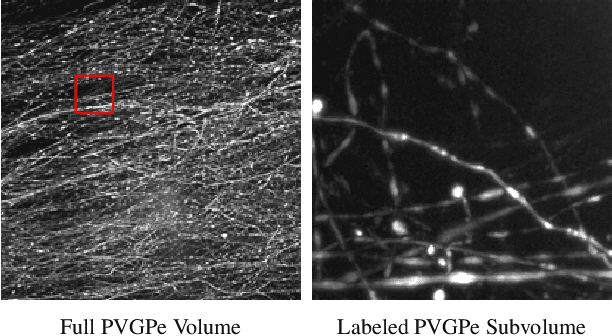
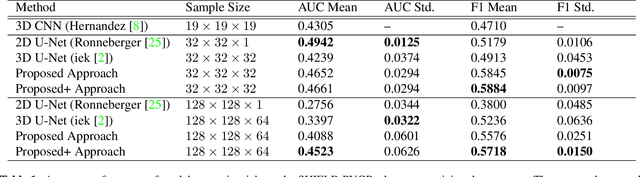
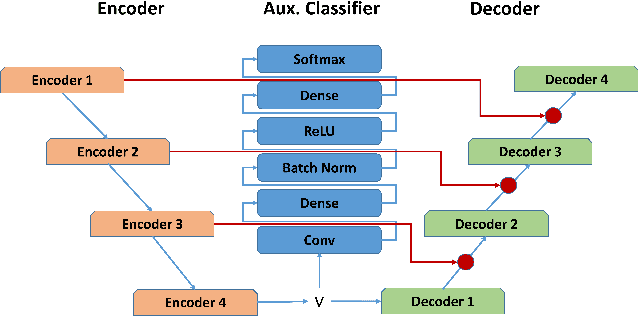

Existing learning-based methods to automatically trace axons in 3D brain imagery often rely on manually annotated segmentation labels. Labeling is a labor-intensive process and is not scalable to whole-brain analysis, which is needed for improved understanding of brain function. We propose a self-supervised auxiliary task that utilizes the tube-like structure of axons to build a feature extractor from unlabeled data. The proposed auxiliary task constrains a 3D convolutional neural network (CNN) to predict the order of permuted slices in an input 3D volume. By solving this task, the 3D CNN is able to learn features without ground-truth labels that are useful for downstream segmentation with the 3D U-Net model. To the best of our knowledge, our model is the first to perform automated segmentation of axons imaged at subcellular resolution with the SHIELD technique. We demonstrate improved segmentation performance over the 3D U-Net model on both the SHIELD PVGPe dataset and the BigNeuron Project, single neuron Janelia dataset.