 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSidewalk Hazard Detection Using Variational Autoencoder and One-Class SVM
Dec 31, 2024



The unpredictable nature of outdoor settings introduces numerous safety concerns, making hazard detection crucial for safe navigation. This paper introduces a novel system for sidewalk safety navigation utilizing a hybrid approach that combines a Variational Autoencoder (VAE) with a One-Class Support Vector Machine (OCSVM). The system is designed to detect anomalies on sidewalks that could potentially pose walking hazards. A dataset comprising over 15,000 training frames and 5,000 testing frames was collected using video recordings, capturing various sidewalk scenarios, including normal and hazardous conditions. During deployment, the VAE utilizes its reconstruction mechanism to detect anomalies within a frame. Poor reconstruction by the VAE implies the presence of an anomaly, after which the OCSVM is used to confirm whether the anomaly is hazardous or non-hazardous. The proposed VAE model demonstrated strong performance, with a high Area Under the Curve (AUC) of 0.94, effectively distinguishing anomalies that could be potential hazards. The OCSVM is employed to reduce the detection of false hazard anomalies, such as manhole or water valve covers. This approach achieves an accuracy of 91.4%, providing a highly reliable system for distinguishing between hazardous and non-hazardous scenarios. These results suggest that the proposed system offers a robust solution for hazard detection in uncertain environments.
Point Cloud Context Analysis for Rehabilitation Grasping Assistance
Nov 12, 2024Controlling hand exoskeletons for assisting impaired patients in grasping tasks is challenging because it is difficult to infer user intent. We hypothesize that majority of daily grasping tasks fall into a small set of categories or modes which can be inferred through real-time analysis of environmental geometry from 3D point clouds. This paper presents a low-cost, real-time system for semantic image labeling of household scenes with the objective to inform and assist activities of daily living. The system consists of a miniature depth camera, an inertial measurement unit and a microprocessor. It is able to achieve 85% or higher accuracy at classification of predefined modes while processing complex 3D scenes at over 30 frames per second. Within each mode it can detect and localize graspable objects. Grasping points can be correctly estimated on average within 1 cm for simple object geometries. The system has potential applications in robotic-assisted rehabilitation as well as manual task assistance.
Cosserat Rods for Modeling Tendon-Driven Robotic Catheter Systems
Jul 10, 2024Tendon-driven robotic catheters are capable of precise execution of minimally invasive cardiac procedures including ablations and imaging. These procedures require accurate mathematical models of not only the catheter and tendons but also their interactions with surrounding tissue and vasculature in order to control the robot path and interaction. This paper presents a mechanical model of a tendon-driven robotic catheter system based on Cosserat rods and integrated with a stable, implicit Euler scheme. We implement the Cosserat rod as a model for a simple catheter centerline and validate its physical accuracy against a large deformation analytical model and experimental data. The catheter model is then supplemented by adding a second Cosserat rod to model a single tendon, using penalty forces to define the constraints of the tendon-catheter system. All the model parameters are defined by the catheter properties established by the design. The combined model is validated against experimental data to confirm its physical accuracy. This model represents a new contribution to the field of robotic catheter modeling in which both the tendons and catheter are modeled by mechanical Cosserat rods and fully-validated against experimental data in the case of the single rod system.
A Compliant, Underactuated Hand for Robust Manipulation
Jan 17, 2013
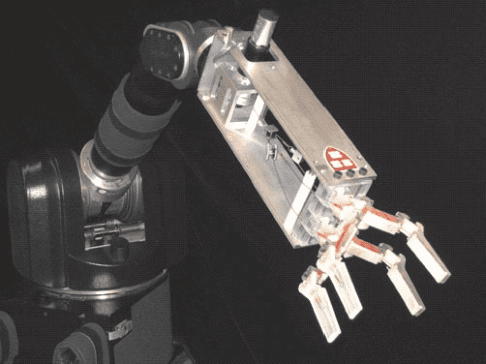
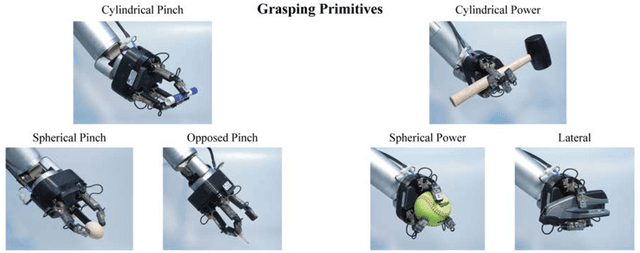
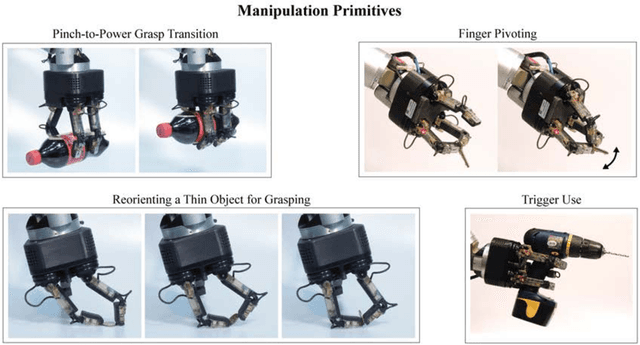
This paper introduces the i-HY Hand, an underactuated hand driven by 5 actuators that is capable of performing a wide range of grasping and in-hand manipulation tasks. This hand was designed to address the need for a durable, inexpensive, moderately dexterous hand suitable for use on mobile robots. The primary focus of this paper will be on the novel minimalistic design of i-HY, which was developed by choosing a set of target tasks around which the design of the hand was optimized. Particular emphasis is placed on the development of underactuated fingers that are capable of both firm power grasps and low- stiffness fingertip grasps using only the passive mechanics of the finger mechanism. Experimental results demonstrate successful grasping of a wide range of target objects, the stability of fingertip grasping, as well as the ability to adjust the force exerted on grasped objects using the passive finger mechanics.