 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCognitiveTwin: Robust Multi-Modal Digital Twins for Predicting Cognitive Decline in Alzheimer's Disease
Apr 24, 2026Predicting individual cognitive decline in Alzheimer's disease (AD) is difficult due to the heterogeneity of disease progression. Reliable clinical tools require not only high accuracy but also fairness across demographics and robustness to missing data. We present CognitiveTwin, a digital twin framework that predicts patient-specific cognitive trajectories. The model integrates multi-modal longitudinal data (cognitive scores, magnetic resonance imaging, positron emission tomography, cerebrospinal fluid biomarkers, and genetics). We use a Transformer-based architecture to fuse these modalities and a Deep Markov Model to capture temporal dynamics. We trained and evaluated the framework using data from 1,666 patients in the TADPOLE (Alzheimer's Disease Neuroimaging Initiative) dataset. We assessed the model for prediction error, demographic fairness, and robustness to missing-not-at-random (MNAR) data patterns. ognitiveTwin provides accurate and personalized predictions of cognitive decline. Its demonstrated fairness across patient demographics and resilience to clinical dropout make it a reliable tool for clinical trial enrichment and personalized care planning.
Toward Actionable Digital Twins for Radiation-Based Imaging and Therapy: Mathematical Formulation, Modular Workflow, and an OpenKBP-Based Dose-Surrogate Prototype
Mar 26, 2026Digital twins for radiation-based imaging and therapy are most useful when they assimilate patient data, quantify predictive uncertainty, and support clinically constrained decisions. This paper presents a modular framework for actionable digital twins in radiation-based imaging and therapy and instantiates its reproducible open-data component using the \openkbpfull{} benchmark. The framework couples PatientData, Model, Solver, Calibration, and Decision modules and formalizes latent-state updating, uncertainty propagation, and chance-constrained action selection. As an initial implementation, we build a GPU-ready PyTorch/MONAI reimplementation of the \openkbp{} starter pipeline: an 11-channel, 19.2M-parameter 3D U-Net trained with a masked loss over the feasible region and equipped with Monte Carlo dropout for voxel-wise epistemic uncertainty. To emulate the update loop on a static benchmark, we introduce decoder-only proxy recalibration and illustrate uncertainty-aware virtual-therapy evaluation using DVH-based and biological utilities. A complete three-fraction loop including recalibration, Monte Carlo inference, and spatial optimization executes in 10.3~s. On the 100-patient test set, the model achieved mean dose and DVH scores of 2.65 and 1.82~Gy, respectively, with 0.58~s mean inference time per patient. The \openkbp{} case study thus serves as a reproducible test bed for dose prediction, uncertainty propagation, and proxy closed-loop adaptation, while future institutional studies will address longitudinal calibration with delivered-dose logs and repeat imaging.
Forecasting Geopolitical Events with a Sparse Temporal Fusion Transformer and Gaussian Process Hybrid: A Case Study in Middle Eastern and U.S. Conflict Dynamics
Jun 26, 2025Forecasting geopolitical conflict from data sources like the Global Database of Events, Language, and Tone (GDELT) is a critical challenge for national security. The inherent sparsity, burstiness, and overdispersion of such data cause standard deep learning models, including the Temporal Fusion Transformer (TFT), to produce unreliable long-horizon predictions. We introduce STFT-VNNGP, a hybrid architecture that won the 2023 Algorithms for Threat Detection (ATD) competition by overcoming these limitations. Designed to bridge this gap, our model employs a two-stage process: first, a TFT captures complex temporal dynamics to generate multi-quantile forecasts. These quantiles then serve as informed inputs for a Variational Nearest Neighbor Gaussian Process (VNNGP), which performs principled spatiotemporal smoothing and uncertainty quantification. In a case study forecasting conflict dynamics in the Middle East and the U.S., STFT-VNNGP consistently outperforms a standalone TFT, showing a superior ability to predict the timing and magnitude of bursty event periods, particularly at long-range horizons. This work offers a robust framework for generating more reliable and actionable intelligence from challenging event data, with all code and workflows made publicly available to ensure reproducibility.
Artificial Intelligence for Personalized Prediction of Alzheimer's Disease Progression: A Survey of Methods, Data Challenges, and Future Directions
Apr 29, 2025

Alzheimer's Disease (AD) is marked by significant inter-individual variability in its progression, complicating accurate prognosis and personalized care planning. This heterogeneity underscores the critical need for predictive models capable of forecasting patient-specific disease trajectories. Artificial Intelligence (AI) offers powerful tools to address this challenge by analyzing complex, multi-modal, and longitudinal patient data. This paper provides a comprehensive survey of AI methodologies applied to personalized AD progression prediction. We review key approaches including state-space models for capturing temporal dynamics, deep learning techniques like Recurrent Neural Networks for sequence modeling, Graph Neural Networks (GNNs) for leveraging network structures, and the emerging concept of AI-driven digital twins for individualized simulation. Recognizing that data limitations often impede progress, we examine common challenges such as high dimensionality, missing data, and dataset imbalance. We further discuss AI-driven mitigation strategies, with a specific focus on synthetic data generation using Variational Autoencoders (VAEs) and Generative Adversarial Networks (GANs) to augment and balance datasets. The survey synthesizes the strengths and limitations of current approaches, emphasizing the trend towards multimodal integration and the persistent need for model interpretability and generalizability. Finally, we identify critical open challenges, including robust external validation, clinical integration, and ethical considerations, and outline promising future research directions such as hybrid models, causal inference, and federated learning. This review aims to consolidate current knowledge and guide future efforts in developing clinically relevant AI tools for personalized AD prognostication.
Robust Regularized Low-Rank Matrix Models for Regression and Classification
May 14, 2022
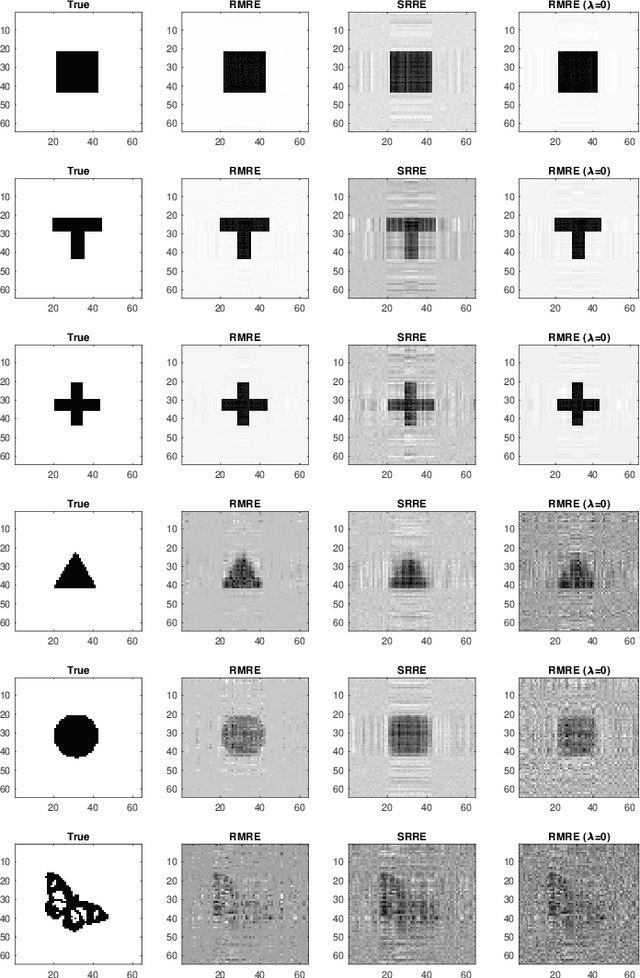

While matrix variate regression models have been studied in many existing works, classical statistical and computational methods for the analysis of the regression coefficient estimation are highly affected by high dimensional and noisy matrix-valued predictors. To address these issues, this paper proposes a framework of matrix variate regression models based on a rank constraint, vector regularization (e.g., sparsity), and a general loss function with three special cases considered: ordinary matrix regression, robust matrix regression, and matrix logistic regression. We also propose an alternating projected gradient descent algorithm. Based on analyzing our objective functions on manifolds with bounded curvature, we show that the algorithm is guaranteed to converge, all accumulation points of the iterates have estimation errors in the order of $O(1/\sqrt{n})$ asymptotically and substantially attaining the minimax rate. Our theoretical analysis can be applied to general optimization problems on manifolds with bounded curvature and can be considered an important technical contribution to this work. We validate the proposed method through simulation studies and real image data examples.
The Unsupervised Method of Vessel Movement Trajectory Prediction
Jul 29, 2020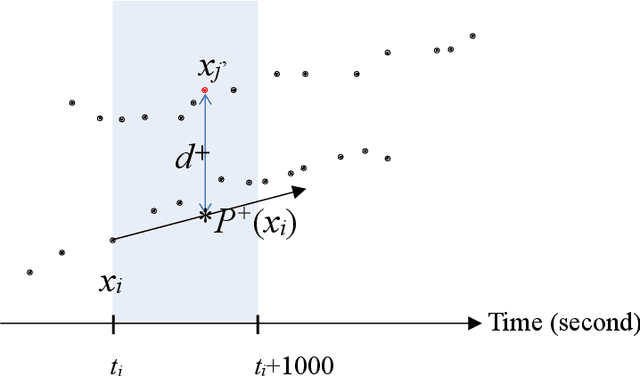

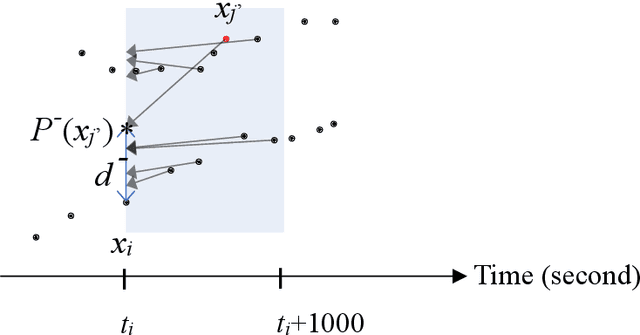

In real-world application scenarios, it is crucial for marine navigators and security analysts to predict vessel movement trajectories at sea based on the Automated Identification System (AIS) data in a given time span. This article presents an unsupervised method of ship movement trajectory prediction which represents the data in a three-dimensional space which consists of time difference between points, the scaled error distance between the tested and its predicted forward and backward locations, and the space-time angle. The representation feature space reduces the search scope for the next point to a collection of candidates which fit the local path prediction well, and therefore improve the accuracy. Unlike most statistical learning or deep learning methods, the proposed clustering-based trajectory reconstruction method does not require computationally expensive model training. This makes real-time reliable and accurate prediction feasible without using a training set. Our results show that the most prediction trajectories accurately consist of the true vessel paths.