 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynSym: A Synthetic Data Generation Framework for Psychiatric Symptom Identification
Mar 23, 2026Psychiatric symptom identification on social media aims to infer fine-grained mental health symptoms from user-generated posts, allowing a detailed understanding of users' mental states. However, the construction of large-scale symptom-level datasets remains challenging due to the resource-intensive nature of expert labeling and the lack of standardized annotation guidelines, which in turn limits the generalizability of models to identify diverse symptom expressions from user-generated text. To address these issues, we propose SynSym, a synthetic data generation framework for constructing generalizable datasets for symptom identification. Leveraging large language models (LLMs), SynSym constructs high-quality training samples by (1) expanding each symptom into sub-concepts to enhance the diversity of generated expressions, (2) producing synthetic expressions that reflect psychiatric symptoms in diverse linguistic styles, and (3) composing realistic multi-symptom expressions, informed by clinical co-occurrence patterns. We validate SynSym on three benchmark datasets covering different styles of depressive symptom expression. Experimental results demonstrate that models trained solely on the synthetic data generated by SynSym perform comparably to those trained on real data, and benefit further from additional fine-tuning with real data. These findings underscore the potential of synthetic data as an alternative resource to real-world annotations in psychiatric symptom modeling, and SynSym serves as a practical framework for generating clinically relevant and realistic symptom expressions.
Enhancing Feature Tracking Reliability for Visual Navigation using Real-Time Safety Filter
Feb 03, 2025



Vision sensors are extensively used for localizing a robot's pose, particularly in environments where global localization tools such as GPS or motion capture systems are unavailable. In many visual navigation systems, localization is achieved by detecting and tracking visual features or landmarks, which provide information about the sensor's relative pose. For reliable feature tracking and accurate pose estimation, it is crucial to maintain visibility of a sufficient number of features. This requirement can sometimes conflict with the robot's overall task objective. In this paper, we approach it as a constrained control problem. By leveraging the invariance properties of visibility constraints within the robot's kinematic model, we propose a real-time safety filter based on quadratic programming. This filter takes a reference velocity command as input and produces a modified velocity that minimally deviates from the reference while ensuring the information score from the currently visible features remains above a user-specified threshold. Numerical simulations demonstrate that the proposed safety filter preserves the invariance condition and ensures the visibility of more features than the required minimum. We also validated its real-world performance by integrating it into a visual simultaneous localization and mapping (SLAM) algorithm, where it maintained high estimation quality in challenging environments, outperforming a simple tracking controller.
Autonomous aerial perching and unperching using omnidirectional tiltrotor and switching controller
Apr 17, 2024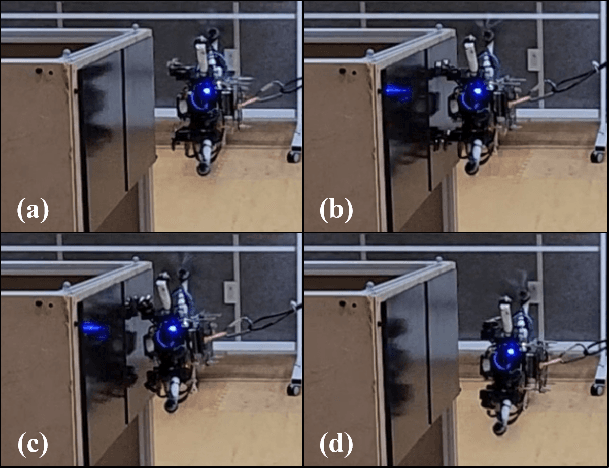
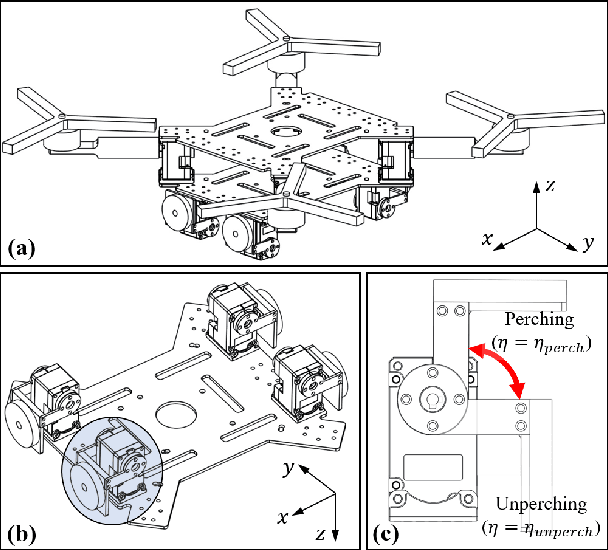
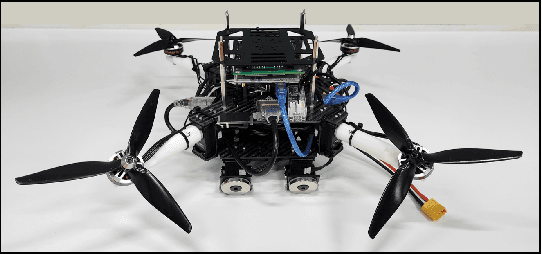
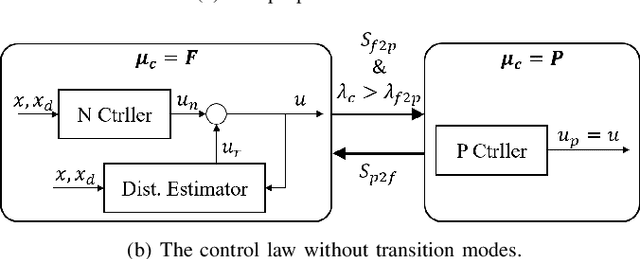
Aerial unperching of multirotors has received little attention as opposed to perching that has been investigated to elongate operation time. This study presents a new aerial robot capable of both perching and unperching autonomously on/from a ferromagnetic surface during flight, and a switching controller to avoid rotor saturation and mitigate overshoot during transition between free-flight and perching. To enable stable perching and unperching maneuvers on/from a vertical surface, a lightweight ($\approx$ $1$ \si{kg}), fully actuated tiltrotor that can hover at $90^\circ$ pitch angle is first developed. We design a perching/unperching module composed of a single servomotor and a magnet, which is then mounted on the tiltrotor. A switching controller including exclusive control modes for transitions between free-flight and perching is proposed. Lastly, we propose a simple yet effective strategy to ensure robust perching in the presence of measurement and control errors and avoid collisions with the perching site immediately after unperching. We validate the proposed framework in experiments where the tiltrotor successfully performs perching and unperching on/from a vertical surface during flight. We further show effectiveness of the proposed transition mode in the switching controller by ablation studies where large overshoot and even collision with a perching site occur. To the best of the authors' knowledge, this work presents the first autonomous aerial unperching framework using a fully actuated tiltrotor.
Minimally actuated tiltrotor for perching and normal force exertion
Jun 26, 2023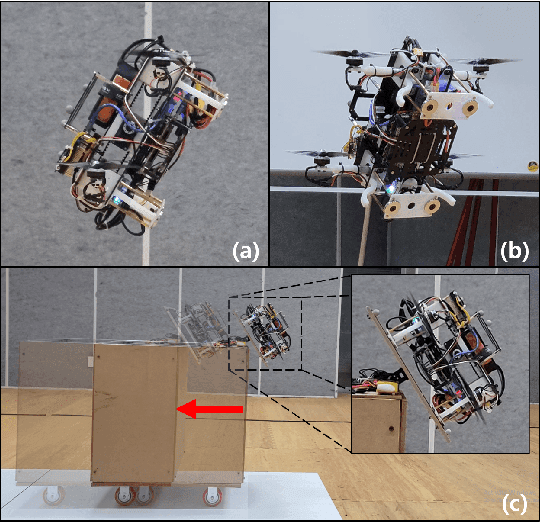

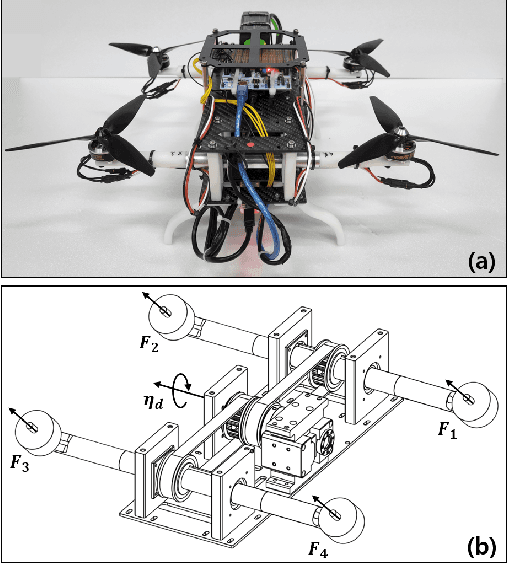
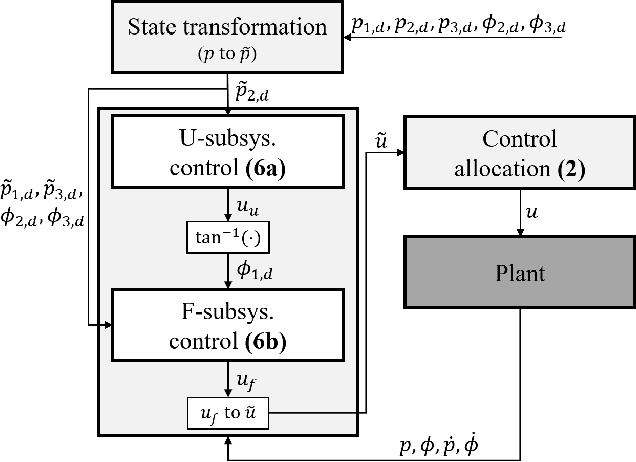
This study presents a new hardware design and control of a minimally actuated 5 control degrees of freedom (CDoF) quadrotor-based tiltrotor. The proposed tiltrotor possesses several characteristics distinct from those found in existing works, including: 1) minimal number of actuators for 5 CDoF, 2) large margin to generate interaction force during aerial physical interaction (APhI), and 3) no mechanical obstruction in thrust direction rotation. Thanks to these properties, the proposed tiltrotor is suitable for perching-enabled APhI since it can hover parallel to an arbitrarily oriented surface and can freely adjust its thrust direction. To fully control the 5-CDoF of the designed tiltrotor, we construct an asymptotically stabilizing controller with stability analysis. The proposed tiltrotor design and controller are validated in experiments where the first two experiments of $x,y$ position tracking and pitch tracking show controllability of the added CDoF compared to a conventional quadrotor. Finally, the last experiment of perching and cart pushing demonstrates the proposed tiltrotor's applicability to perching-enabled APhI.