 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-Critical Control for Aerial Physical Interaction in Uncertain Environment
Jan 28, 2025



Aerial manipulation for safe physical interaction with their environments is gaining significant momentum in robotics research. In this paper, we present a disturbance-observer-based safety-critical control for a fully actuated aerial manipulator interacting with both static and dynamic structures. Our approach centers on a safety filter that dynamically adjusts the desired trajectory of the vehicle's pose, accounting for the aerial manipulator's dynamics, the disturbance observer's structure, and motor thrust limits. We provide rigorous proof that the proposed safety filter ensures the forward invariance of the safety set - representing motor thrust limits - even in the presence of disturbance estimation errors. To demonstrate the superiority of our method over existing control strategies for aerial physical interaction, we perform comparative experiments involving complex tasks, such as pushing against a static structure and pulling a plug firmly attached to an electric socket. Furthermore, to highlight its repeatability in scenarios with sudden dynamic changes, we perform repeated tests of pushing a movable cart and extracting a plug from a socket. These experiments confirm that our method not only outperforms existing methods but also excels in handling tasks with rapid dynamic variations.
Haptic-Based Bilateral Teleoperation of Aerial Manipulator for Extracting Wedged Object with Compensation of Human Reaction Time
May 02, 2024Bilateral teleoperation of an aerial manipulator facilitates the execution of industrial missions thanks to the combination of the aerial platform's maneuverability and the ability to conduct complex tasks with human supervision. Heretofore, research on such operations has focused on flying without any physical interaction or exerting a pushing force on a contact surface that does not involve abrupt changes in the interaction force. In this paper, we propose a human reaction time compensating haptic-based bilateral teleoperation strategy for an aerial manipulator extracting a wedged object from a static structure (i.e., plug-pulling), which incurs an abrupt decrease in the interaction force and causes additional difficulty for an aerial platform. A haptic device composed of a 4-degree-of-freedom robotic arm and a gripper is made for the teleoperation of aerial wedged object-extracting tasks, and a haptic-based teleoperation method to execute the aerial manipulator by the haptic device is introduced. We detect the extraction of the object by the estimation of the external force exerted on the aerial manipulator and generate reference trajectories for both the aerial manipulator and the haptic device after the extraction. As an example of the extraction of a wedged object, we conduct comparative plug-pulling experiments with a quadrotor-based aerial manipulator. The results validate that the proposed bilateral teleoperation method reduces the overshoot in the aerial manipulator's position and ensures fast recovery to its initial position after extracting the wedged object.
Autonomous aerial perching and unperching using omnidirectional tiltrotor and switching controller
Apr 17, 2024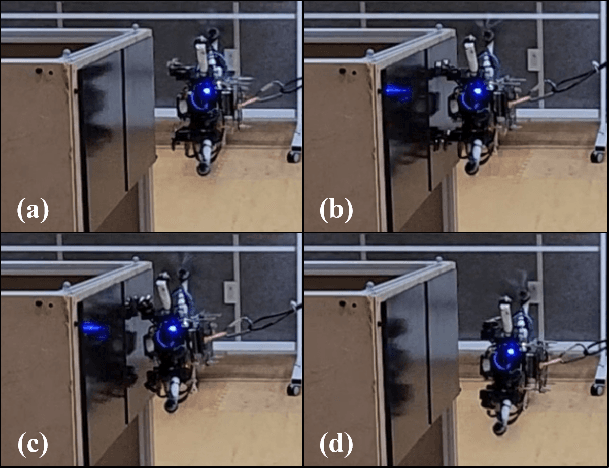
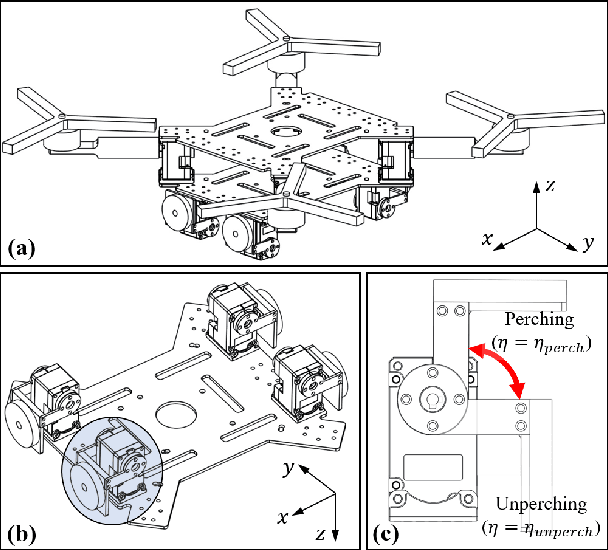
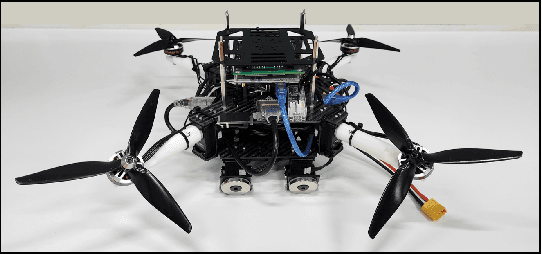
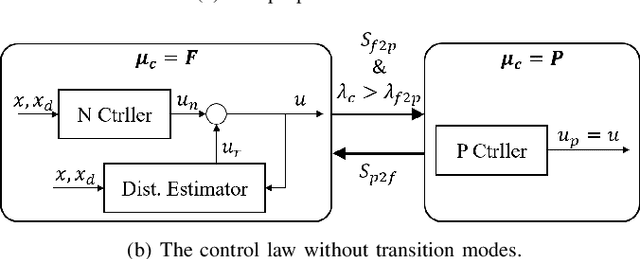
Aerial unperching of multirotors has received little attention as opposed to perching that has been investigated to elongate operation time. This study presents a new aerial robot capable of both perching and unperching autonomously on/from a ferromagnetic surface during flight, and a switching controller to avoid rotor saturation and mitigate overshoot during transition between free-flight and perching. To enable stable perching and unperching maneuvers on/from a vertical surface, a lightweight ($\approx$ $1$ \si{kg}), fully actuated tiltrotor that can hover at $90^\circ$ pitch angle is first developed. We design a perching/unperching module composed of a single servomotor and a magnet, which is then mounted on the tiltrotor. A switching controller including exclusive control modes for transitions between free-flight and perching is proposed. Lastly, we propose a simple yet effective strategy to ensure robust perching in the presence of measurement and control errors and avoid collisions with the perching site immediately after unperching. We validate the proposed framework in experiments where the tiltrotor successfully performs perching and unperching on/from a vertical surface during flight. We further show effectiveness of the proposed transition mode in the switching controller by ablation studies where large overshoot and even collision with a perching site occur. To the best of the authors' knowledge, this work presents the first autonomous aerial unperching framework using a fully actuated tiltrotor.
Stable Contact Guaranteeing Motion/Force Control for an Aerial Manipulator on an Arbitrarily Tilted Surface
Jan 19, 2023



This study aims to design a motion/force controller for an aerial manipulator which guarantees the tracking of time-varying motion/force trajectories as well as the stability during the transition between free and contact motions. To this end, we model the force exerted on the end-effector as the Kelvin-Voigt linear model and estimate its parameters by recursive least-squares estimator. Then, the gains of the disturbance-observer (DOB)-based motion/force controller are calculated based on the stability conditions considering both the model uncertainties in the dynamic equation and switching between the free and contact motions. To validate the proposed controller, we conducted the time-varying motion/force tracking experiments with different approach speeds and orientations of the surface. The results show that our controller enables the aerial manipulator to track the time-varying motion/force trajectories.
Real-Time Motion Planning of a Hydraulic Excavator using Trajectory Optimization and Model Predictive Control
Jul 08, 2021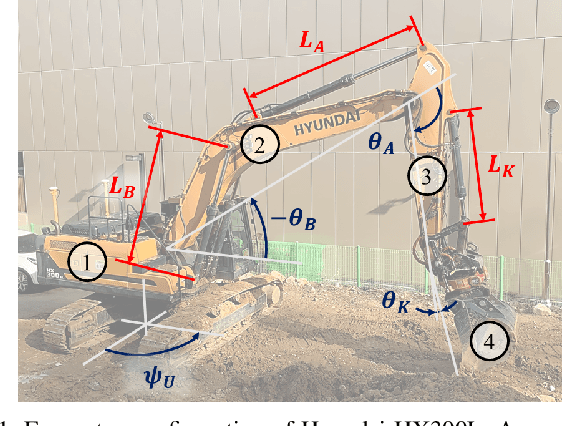
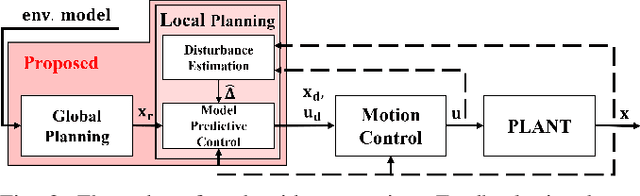
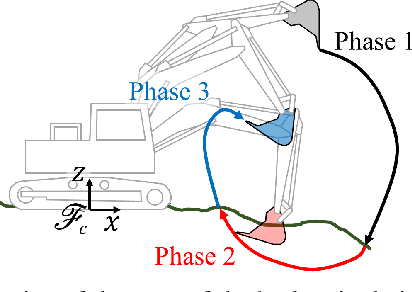
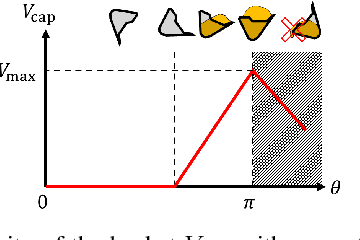
Automation of excavation tasks requires real-time trajectory planning satisfying various constraints. To guarantee both constraint feasibility and real-time trajectory re-plannability, we present an integrated framework for real-time optimization-based trajectory planning of a hydraulic excavator. The proposed framework is composed of two main modules: a global planner and a real-time local planner. The global planner computes the entire global trajectory considering excavation volume and energy minimization while the local counterpart tracks the global trajectory in a receding horizon manner, satisfying dynamic feasibility, physical constraints, and disturbance-awareness. We validate the proposed planning algorithm in a simulation environment where two types of operations are conducted in the presence of emulated disturbance from hydraulic friction and soil-bucket interaction: shallow and deep excavation. The optimized global trajectories are obtained in an order of a second, which is tracked by the local planner at faster than 30 Hz. To the best of our knowledge, this work presents the first real-time motion planning framework that satisfies constraints of a hydraulic excavator, such as force/torque, power, cylinder displacement, and flow rate limits.
Stability and Robustness Analysis of Plug-Pulling using an Aerial Manipulator
Jul 06, 2021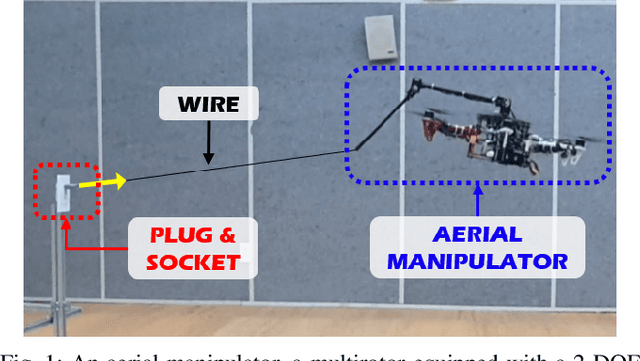

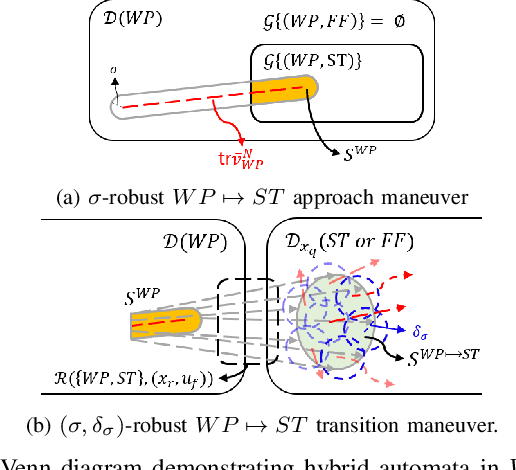
In this paper, an autonomous aerial manipulation task of pulling a plug out of an electric socket is conducted, where maintaining the stability and robustness is challenging due to sudden disappearance of a large interaction force. The abrupt change in the dynamical model before and after the separation of the plug can cause destabilization or mission failure. To accomplish aerial plug-pulling, we employ the concept of hybrid automata to divide the task into three operative modes, i.e, wire-pulling, stabilizing, and free-flight. Also, a strategy for trajectory generation and a design of disturbance-observer-based controllers for each operative mode are presented. Furthermore, the theory of hybrid automata is used to prove the stability and robustness during the mode transition. We validate the proposed trajectory generation and control method by an actual wire-pulling experiment with a multirotor-based aerial manipulator.