 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Motion Planning of a Hydraulic Excavator using Trajectory Optimization and Model Predictive Control
Jul 08, 2021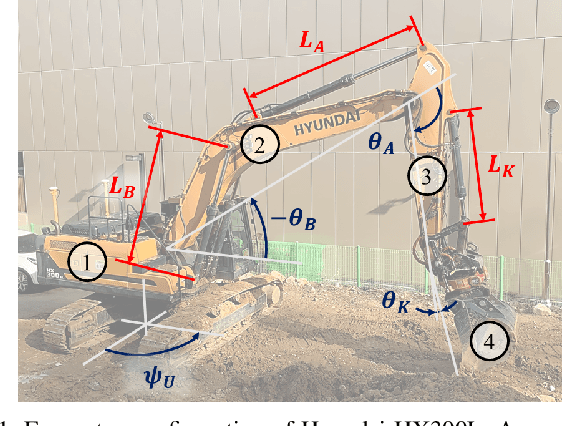
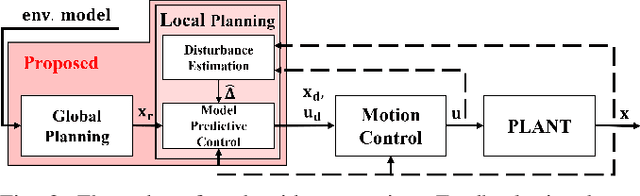
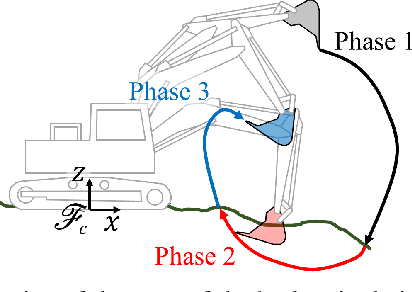
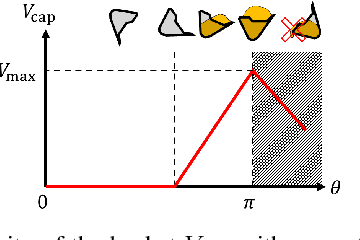
Automation of excavation tasks requires real-time trajectory planning satisfying various constraints. To guarantee both constraint feasibility and real-time trajectory re-plannability, we present an integrated framework for real-time optimization-based trajectory planning of a hydraulic excavator. The proposed framework is composed of two main modules: a global planner and a real-time local planner. The global planner computes the entire global trajectory considering excavation volume and energy minimization while the local counterpart tracks the global trajectory in a receding horizon manner, satisfying dynamic feasibility, physical constraints, and disturbance-awareness. We validate the proposed planning algorithm in a simulation environment where two types of operations are conducted in the presence of emulated disturbance from hydraulic friction and soil-bucket interaction: shallow and deep excavation. The optimized global trajectories are obtained in an order of a second, which is tracked by the local planner at faster than 30 Hz. To the best of our knowledge, this work presents the first real-time motion planning framework that satisfies constraints of a hydraulic excavator, such as force/torque, power, cylinder displacement, and flow rate limits.
Stability and Robustness Analysis of Plug-Pulling using an Aerial Manipulator
Jul 06, 2021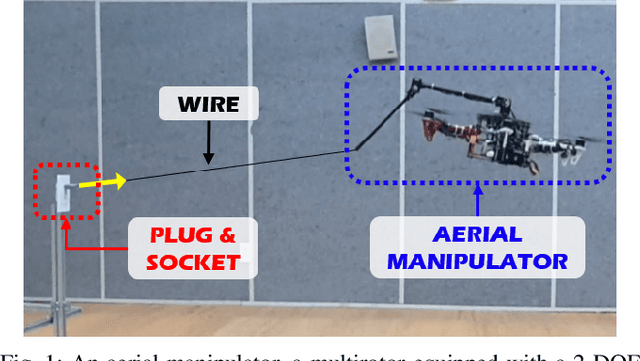
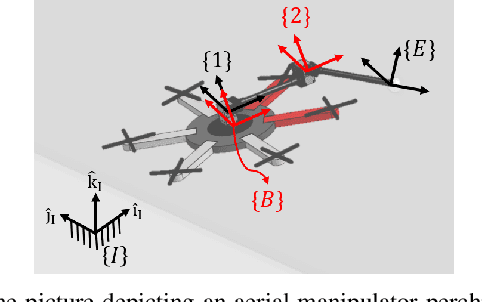

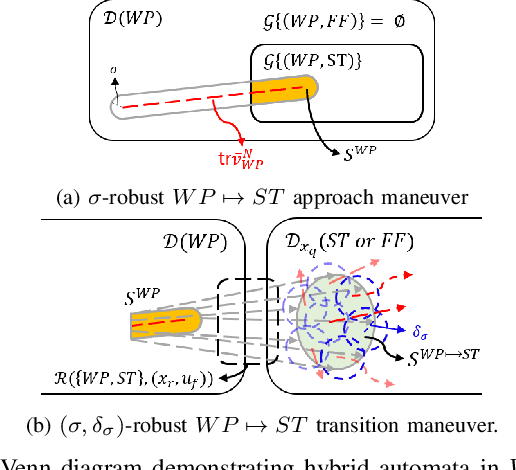
In this paper, an autonomous aerial manipulation task of pulling a plug out of an electric socket is conducted, where maintaining the stability and robustness is challenging due to sudden disappearance of a large interaction force. The abrupt change in the dynamical model before and after the separation of the plug can cause destabilization or mission failure. To accomplish aerial plug-pulling, we employ the concept of hybrid automata to divide the task into three operative modes, i.e, wire-pulling, stabilizing, and free-flight. Also, a strategy for trajectory generation and a design of disturbance-observer-based controllers for each operative mode are presented. Furthermore, the theory of hybrid automata is used to prove the stability and robustness during the mode transition. We validate the proposed trajectory generation and control method by an actual wire-pulling experiment with a multirotor-based aerial manipulator.
Aerial Manipulation using Model Predictive Control for Opening a Hinged Door
Mar 18, 2020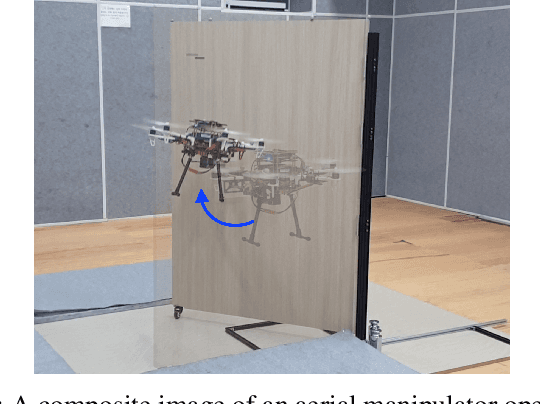
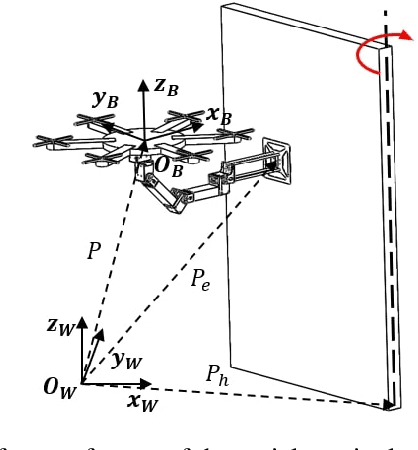
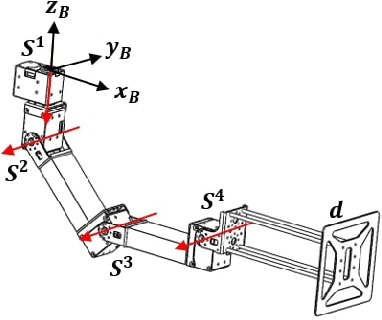
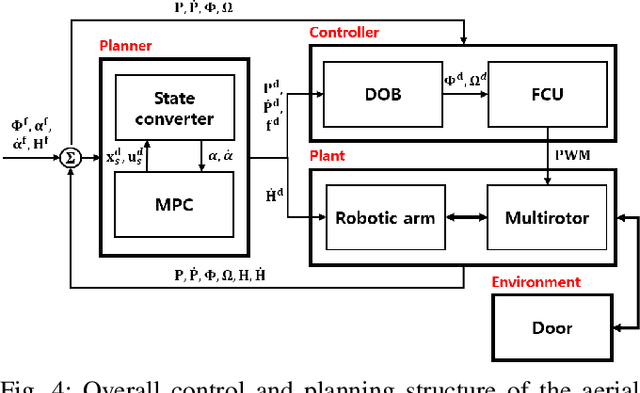
Existing studies for environment interaction with an aerial robot have been focused on interaction with static surroundings. However, to fully explore the concept of an aerial manipulation, interaction with moving structures should also be considered. In this paper, a multirotor-based aerial manipulator opening a daily-life moving structure, a hinged door, is presented. In order to address the constrained motion of the structure and to avoid collisions during operation, model predictive control (MPC) is applied to the derived coupled system dynamics between the aerial manipulator and the door involving state constraints. By implementing a constrained version of differential dynamic programming (DDP), MPC can generate position setpoints to the disturbance observer (DOB)-based robust controller in real-time, which is validated by our experimental results.