 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTreeLoc++: Robust 6-DoF LiDAR Localization in Forests with a Compact Digital Forest Inventory
Mar 04, 2026Reliable localization is essential for sustainable forest management, as it allows robots or sensor systems to revisit and monitor the status of individual trees over long periods. In modern forestry, this management is structured around Digital Forest Inventories (DFIs), which encode stems using compact geometric attributes rather than raw data. Despite their central role, DFIs have been overlooked in localization research, and most methods still rely on dense gigabyte-sized point clouds that are costly to store and maintain. To improve upon this, we propose TreeLoc++, a global localization framework that operates directly on DFIs as a discriminative representation, eliminating the need to use the raw point clouds. TreeLoc++ reduces false matches in structurally ambiguous forests and improves the reliability of full 6-DoF pose estimation. It augments coarse retrieval with a pairwise distance histogram that encodes local tree-layout context, subsequently refining candidates via DBH-based filtering and yaw-consistent inlier selection to further reduce mismatches. Furthermore, a constrained optimization leveraging tree geometry jointly estimates roll, pitch, and height, enhancing pose stability and enabling accurate localization without reliance on dense 3D point cloud data. Evaluations on 27 sequences recorded in forests across three datasets and four countries show that TreeLoc++ achieves precise localization with centimeter-level accuracy. We further demonstrate robustness to long-term change by localizing data recorded in 2025 against inventories built from 2023 data, spanning a two-year interval. The system represents 15 sessions spanning 7.98 km of trajectories using only 250KB of map data and outperforms both hand-crafted and learning-based baselines that rely on point cloud maps. This demonstrates the scalability of TreeLoc++ for long-term deployment.
Geometric Backstepping Control of Omnidirectional Tiltrotors Incorporating Servo-Rotor Dynamics for Robustness against Sudden Disturbances
Oct 02, 2025This work presents a geometric backstepping controller for a variable-tilt omnidirectional multirotor that explicitly accounts for both servo and rotor dynamics. Considering actuator dynamics is essential for more effective and reliable operation, particularly during aggressive flight maneuvers or recovery from sudden disturbances. While prior studies have investigated actuator-aware control for conventional and fixed-tilt multirotors, these approaches rely on linear relationships between actuator input and wrench, which cannot capture the nonlinearities induced by variable tilt angles. In this work, we exploit the cascade structure between the rigid-body dynamics of the multirotor and its nonlinear actuator dynamics to design the proposed backstepping controller and establish exponential stability of the overall system. Furthermore, we reveal parametric uncertainty in the actuator model through experiments, and we demonstrate that the proposed controller remains robust against such uncertainty. The controller was compared against a baseline that does not account for actuator dynamics across three experimental scenarios: fast translational tracking, rapid rotational tracking, and recovery from sudden disturbance. The proposed method consistently achieved better tracking performance, and notably, while the baseline diverged and crashed during the fastest translational trajectory tracking and the recovery experiment, the proposed controller maintained stability and successfully completed the tasks, thereby demonstrating its effectiveness.
Autonomous Aerial Manipulation at Arbitrary Pose in SE(3) with Robust Control and Whole-body Planning
Aug 27, 2025



Aerial manipulators based on conventional multirotors can conduct manipulation only in small roll and pitch angles due to the underactuatedness of the multirotor base. If the multirotor base is capable of hovering at arbitrary orientation, the robot can freely locate itself at any point in $\mathsf{SE}(3)$, significantly extending its manipulation workspace and enabling a manipulation task that was originally not viable. In this work, we present a geometric robust control and whole-body motion planning framework for an omnidirectional aerial manipulator (OAM). To maximize the strength of OAM, we first propose a geometric robust controller for a floating base. Since the motion of the robotic arm and the interaction forces during manipulation affect the stability of the floating base, the base should be capable of mitigating these adverse effects while controlling its 6D pose. We then design a two-step optimization-based whole-body motion planner, jointly considering the pose of the floating base and the joint angles of the robotic arm to harness the entire configuration space. The devised two-step approach facilitates real-time applicability and enhances convergence of the optimization problem with non-convex and non-Euclidean search space. The proposed approach enables the base to be stationary at any 6D pose while autonomously carrying out sophisticated manipulation near obstacles without any collision. We demonstrate the effectiveness of the proposed framework through experiments in which an OAM performs grasping and pulling of an object in multiple scenarios, including near $90^\circ$ and even $180^\circ$ pitch angles.
VocalAgent: Large Language Models for Vocal Health Diagnostics with Safety-Aware Evaluation
May 19, 2025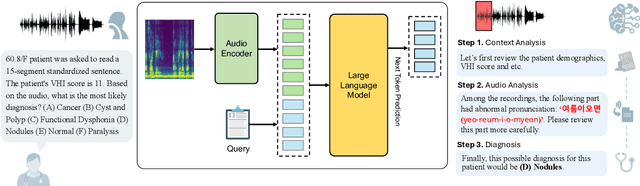
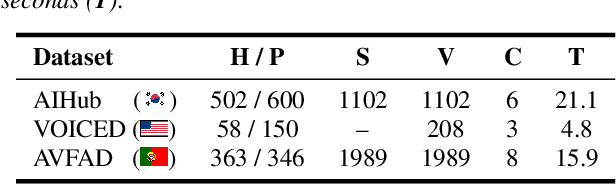
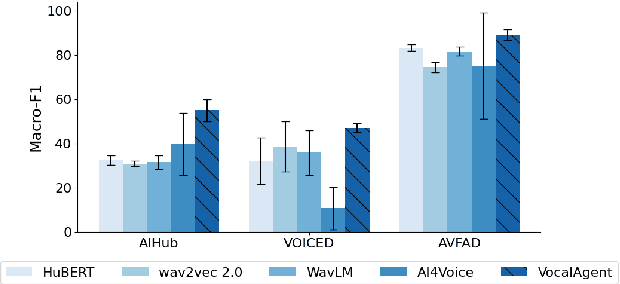
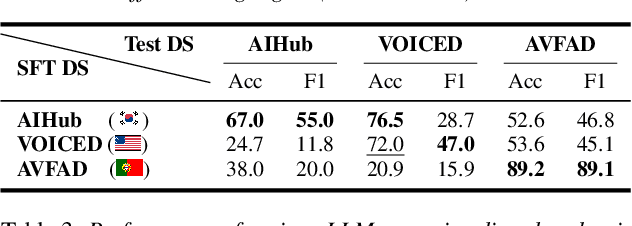
Vocal health plays a crucial role in peoples' lives, significantly impacting their communicative abilities and interactions. However, despite the global prevalence of voice disorders, many lack access to convenient diagnosis and treatment. This paper introduces VocalAgent, an audio large language model (LLM) to address these challenges through vocal health diagnosis. We leverage Qwen-Audio-Chat fine-tuned on three datasets collected in-situ from hospital patients, and present a multifaceted evaluation framework encompassing a safety assessment to mitigate diagnostic biases, cross-lingual performance analysis, and modality ablation studies. VocalAgent demonstrates superior accuracy on voice disorder classification compared to state-of-the-art baselines. Its LLM-based method offers a scalable solution for broader adoption of health diagnostics, while underscoring the importance of ethical and technical validation.
The City that Never Settles: Simulation-based LiDAR Dataset for Long-Term Place Recognition Under Extreme Structural Changes
May 08, 2025



Large-scale construction and demolition significantly challenge long-term place recognition (PR) by drastically reshaping urban and suburban environments. Existing datasets predominantly reflect limited or indoor-focused changes, failing to adequately represent extensive outdoor transformations. To bridge this gap, we introduce the City that Never Settles (CNS) dataset, a simulation-based dataset created using the CARLA simulator, capturing major structural changes-such as building construction and demolition-across diverse maps and sequences. Additionally, we propose TCR_sym, a symmetric version of the original TCR metric, enabling consistent measurement of structural changes irrespective of source-target ordering. Quantitative comparisons demonstrate that CNS encompasses more extensive transformations than current real-world benchmarks. Evaluations of state-of-the-art LiDAR-based PR methods on CNS reveal substantial performance degradation, underscoring the need for robust algorithms capable of handling significant environmental changes. Our dataset is available at https://github.com/Hyunho111/CNS_dataset.
Ephemerality meets LiDAR-based Lifelong Mapping
Feb 19, 2025



Lifelong mapping is crucial for the long-term deployment of robots in dynamic environments. In this paper, we present ELite, an ephemerality-aided LiDAR-based lifelong mapping framework which can seamlessly align multiple session data, remove dynamic objects, and update maps in an end-to-end fashion. Map elements are typically classified as static or dynamic, but cases like parked cars indicate the need for more detailed categories than binary. Central to our approach is the probabilistic modeling of the world into two-stage $\textit{ephemerality}$, which represent the transiency of points in the map within two different time scales. By leveraging the spatiotemporal context encoded in ephemeralities, ELite can accurately infer transient map elements, maintain a reliable up-to-date static map, and improve robustness in aligning the new data in a more fine-grained manner. Extensive real-world experiments on long-term datasets demonstrate the robustness and effectiveness of our system. The source code is publicly available for the robotics community: https://github.com/dongjae0107/ELite.
Safety-Critical Control for Aerial Physical Interaction in Uncertain Environment
Jan 28, 2025



Aerial manipulation for safe physical interaction with their environments is gaining significant momentum in robotics research. In this paper, we present a disturbance-observer-based safety-critical control for a fully actuated aerial manipulator interacting with both static and dynamic structures. Our approach centers on a safety filter that dynamically adjusts the desired trajectory of the vehicle's pose, accounting for the aerial manipulator's dynamics, the disturbance observer's structure, and motor thrust limits. We provide rigorous proof that the proposed safety filter ensures the forward invariance of the safety set - representing motor thrust limits - even in the presence of disturbance estimation errors. To demonstrate the superiority of our method over existing control strategies for aerial physical interaction, we perform comparative experiments involving complex tasks, such as pushing against a static structure and pulling a plug firmly attached to an electric socket. Furthermore, to highlight its repeatability in scenarios with sudden dynamic changes, we perform repeated tests of pushing a movable cart and extracting a plug from a socket. These experiments confirm that our method not only outperforms existing methods but also excels in handling tasks with rapid dynamic variations.
ConPR: Ongoing Construction Site Dataset for Place Recognition
Jul 04, 2024Place recognition, an essential challenge in computer vision and robotics, involves identifying previously visited locations. Despite algorithmic progress, challenges related to appearance change persist, with existing datasets often focusing on seasonal and weather variations but overlooking terrain changes. Understanding terrain alterations becomes critical for effective place recognition, given the aging infrastructure and ongoing city repairs. For real-world applicability, the comprehensive evaluation of algorithms must consider spatial dynamics. To address existing limitations, we present a novel multi-session place recognition dataset acquired from an active construction site. Our dataset captures ongoing construction progress through multiple data collections, facilitating evaluation in dynamic environments. It includes camera images, LiDAR point cloud data, and IMU data, enabling visual and LiDAR-based place recognition techniques, and supporting sensor fusion. Additionally, we provide ground truth information for range-based place recognition evaluation. Our dataset aims to advance place recognition algorithms in challenging and dynamic settings. Our dataset is available at https://github.com/dongjae0107/ConPR.
Saturated RISE control for considering rotor thrust saturation of fully actuated multirotor
Apr 17, 2024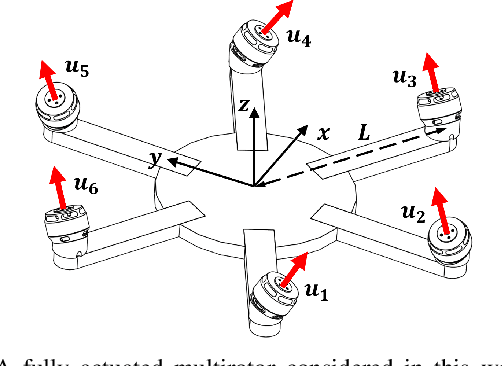
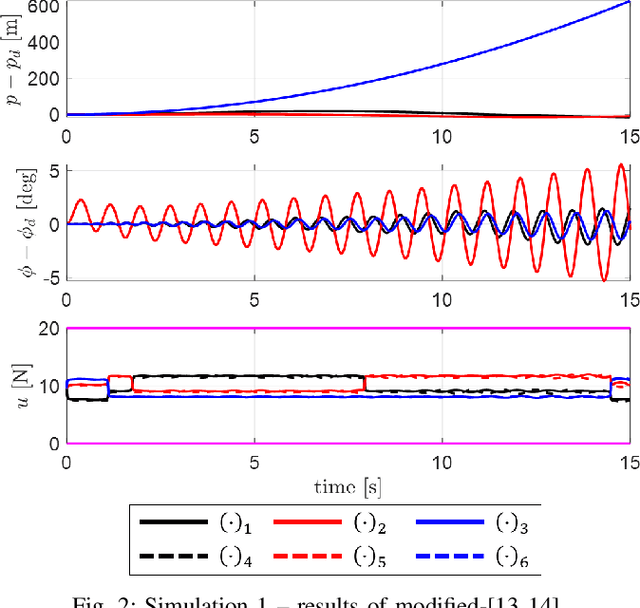
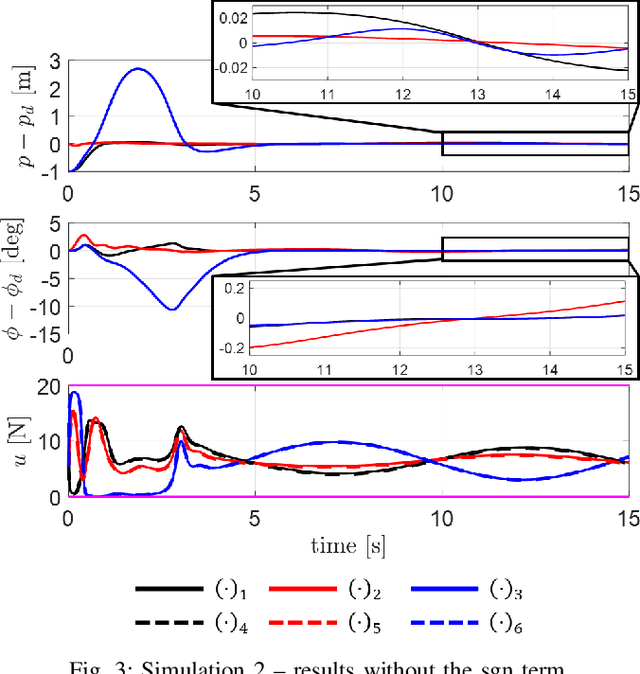
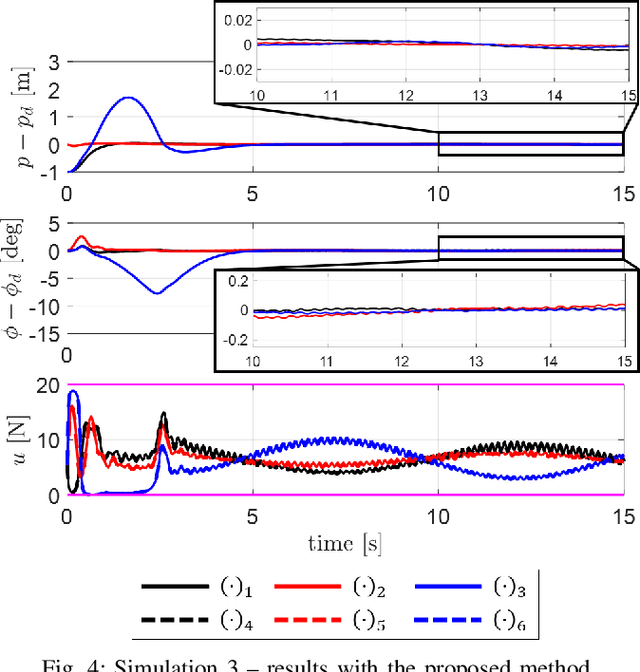
This work proposes a saturated robust controller for a fully actuated multirotor that takes disturbance rejection and rotor thrust saturation into account. A disturbance rejection controller is required to prevent performance degradation in the presence of parametric uncertainty and external disturbance. Furthermore, rotor saturation should be properly addressed in a controller to avoid performance degradation or even instability due to a gap between the commanded input and the actual input during saturation. To address these issues, we present a modified saturated RISE (Robust Integral of the Sign of the Error) control method. The proposed modified saturated RISE controller is developed for expansion to a system with a non-diagonal, state-dependent input matrix. Next, we present reformulation of the system dynamics of a fully actuated multirotor, and apply the control law to the system. The proposed method is validated in simulation where the proposed controller outperforms the existing one thanks to the capability of handling the input matrix.
Autonomous aerial perching and unperching using omnidirectional tiltrotor and switching controller
Apr 17, 2024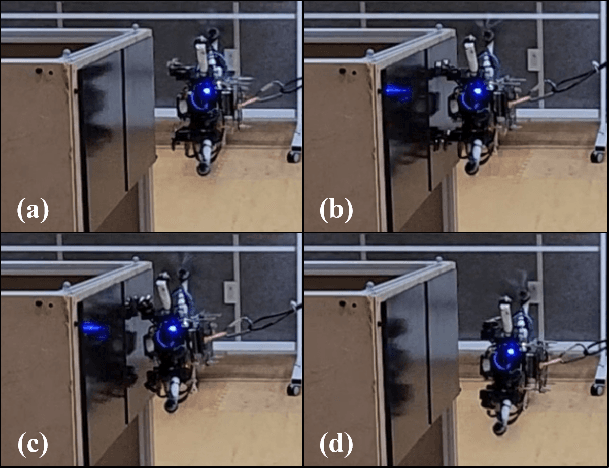
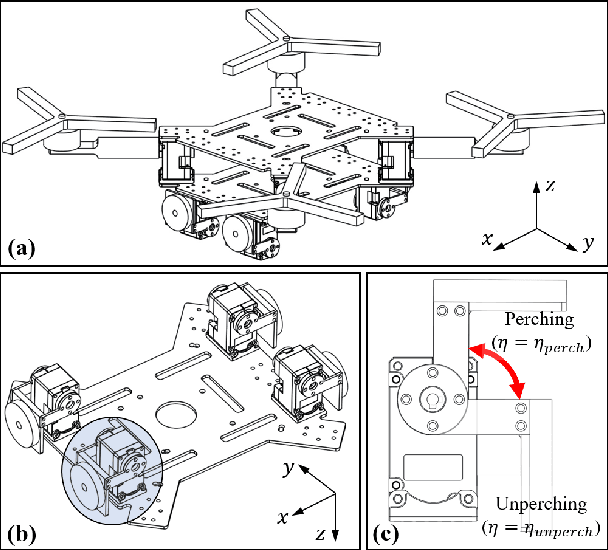
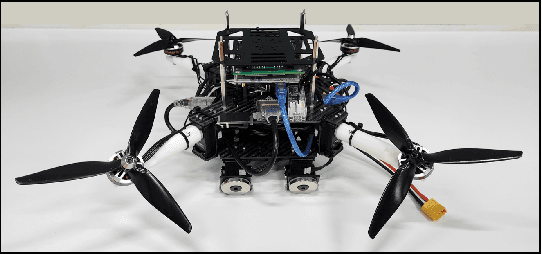
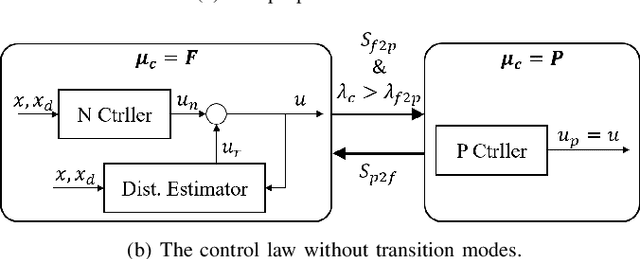
Aerial unperching of multirotors has received little attention as opposed to perching that has been investigated to elongate operation time. This study presents a new aerial robot capable of both perching and unperching autonomously on/from a ferromagnetic surface during flight, and a switching controller to avoid rotor saturation and mitigate overshoot during transition between free-flight and perching. To enable stable perching and unperching maneuvers on/from a vertical surface, a lightweight ($\approx$ $1$ \si{kg}), fully actuated tiltrotor that can hover at $90^\circ$ pitch angle is first developed. We design a perching/unperching module composed of a single servomotor and a magnet, which is then mounted on the tiltrotor. A switching controller including exclusive control modes for transitions between free-flight and perching is proposed. Lastly, we propose a simple yet effective strategy to ensure robust perching in the presence of measurement and control errors and avoid collisions with the perching site immediately after unperching. We validate the proposed framework in experiments where the tiltrotor successfully performs perching and unperching on/from a vertical surface during flight. We further show effectiveness of the proposed transition mode in the switching controller by ablation studies where large overshoot and even collision with a perching site occur. To the best of the authors' knowledge, this work presents the first autonomous aerial unperching framework using a fully actuated tiltrotor.