 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXPRESS: X-Band Radar Place Recognition via Elliptical Scan Shaping
Nov 12, 2025



X-band radar serves as the primary sensor on maritime vessels, however, its application in autonomous navigation has been limited due to low sensor resolution and insufficient information content. To enable X-band radar-only autonomous navigation in maritime environments, this paper proposes a place recognition algorithm specifically tailored for X-band radar, incorporating an object density-based rule for efficient candidate selection and intentional degradation of radar detections to achieve robust retrieval performance. The proposed algorithm was evaluated on both public maritime radar datasets and our own collected dataset, and its performance was compared against state-of-the-art radar place recognition methods. An ablation study was conducted to assess the algorithm's performance sensitivity with respect to key parameters.
* 9 pages, 9 figures, Published in IEEE RA-L
SHeRLoc: Synchronized Heterogeneous Radar Place Recognition for Cross-Modal Localization
Jun 18, 2025Despite the growing adoption of radar in robotics, the majority of research has been confined to homogeneous sensor types, overlooking the integration and cross-modality challenges inherent in heterogeneous radar technologies. This leads to significant difficulties in generalizing across diverse radar data types, with modality-aware approaches that could leverage the complementary strengths of heterogeneous radar remaining unexplored. To bridge these gaps, we propose SHeRLoc, the first deep network tailored for heterogeneous radar, which utilizes RCS polar matching to align multimodal radar data. Our hierarchical optimal transport-based feature aggregation method generates rotationally robust multi-scale descriptors. By employing FFT-similarity-based data mining and adaptive margin-based triplet loss, SHeRLoc enables FOV-aware metric learning. SHeRLoc achieves an order of magnitude improvement in heterogeneous radar place recognition, increasing recall@1 from below 0.1 to 0.9 on a public dataset and outperforming state of-the-art methods. Also applicable to LiDAR, SHeRLoc paves the way for cross-modal place recognition and heterogeneous sensor SLAM. The source code will be available upon acceptance.
Cold-Start Recommendation with Knowledge-Guided Retrieval-Augmented Generation
May 27, 2025Cold-start items remain a persistent challenge in recommender systems due to their lack of historical user interactions, which collaborative models rely on. While recent zero-shot methods leverage large language models (LLMs) to address this, they often struggle with sparse metadata and hallucinated or incomplete knowledge. We propose ColdRAG, a retrieval-augmented generation approach that builds a domain-specific knowledge graph dynamically to enhance LLM-based recommendation in cold-start scenarios, without requiring task-specific fine-tuning. ColdRAG begins by converting structured item attributes into rich natural-language profiles, from which it extracts entities and relationships to construct a unified knowledge graph capturing item semantics. Given a user's interaction history, it scores edges in the graph using an LLM, retrieves candidate items with supporting evidence, and prompts the LLM to rank them. By enabling multi-hop reasoning over this graph, ColdRAG grounds recommendations in verifiable evidence, reducing hallucinations and strengthening semantic connections. Experiments on three public benchmarks demonstrate that ColdRAG surpasses existing zero-shot baselines in both Recall and NDCG. This framework offers a practical solution to cold-start recommendation by combining knowledge-graph reasoning with retrieval-augmented LLM generation.
LLMInit: A Free Lunch from Large Language Models for Selective Initialization of Recommendation
Mar 03, 2025Collaborative filtering models, particularly graph-based approaches, have demonstrated strong performance in capturing user-item interactions for recommendation systems. However, they continue to struggle in cold-start and data-sparse scenarios. The emergence of large language models (LLMs) like GPT and LLaMA presents new possibilities for enhancing recommendation performance, especially in cold-start settings. Despite their promise, LLMs pose challenges related to scalability and efficiency due to their high computational demands and limited ability to model complex user-item relationships effectively. In this work, we introduce a novel perspective on leveraging LLMs for CF model initialization. Through experiments, we uncover an embedding collapse issue when scaling CF models to larger embedding dimensions. To effectively harness large-scale LLM embeddings, we propose innovative selective initialization strategies utilizing random, uniform, and variance-based index sampling. Our comprehensive evaluation on multiple real-world datasets demonstrates significant performance gains across various CF models while maintaining a lower computational cost compared to existing LLM-based recommendation approaches.
Ground-Optimized 4D Radar-Inertial Odometry via Continuous Velocity Integration using Gaussian Process
Feb 12, 2025Radar ensures robust sensing capabilities in adverse weather conditions, yet challenges remain due to its high inherent noise level. Existing radar odometry has overcome these challenges with strategies such as filtering spurious points, exploiting Doppler velocity, or integrating with inertial measurements. This paper presents two novel improvements beyond the existing radar-inertial odometry: ground-optimized noise filtering and continuous velocity preintegration. Despite the widespread use of ground planes in LiDAR odometry, imprecise ground point distributions of radar measurements cause naive plane fitting to fail. Unlike plane fitting in LiDAR, we introduce a zone-based uncertainty-aware ground modeling specifically designed for radar. Secondly, we note that radar velocity measurements can be better combined with IMU for a more accurate preintegration in radar-inertial odometry. Existing methods often ignore temporal discrepancies between radar and IMU by simplifying the complexities of asynchronous data streams with discretized propagation models. Tackling this issue, we leverage GP and formulate a continuous preintegration method for tightly integrating 3-DOF linear velocity with IMU, facilitating full 6-DOF motion directly from the raw measurements. Our approach demonstrates remarkable performance (less than 1% vertical drift) in public datasets with meticulous conditions, illustrating substantial improvement in elevation accuracy. The code will be released as open source for the community: https://github.com/wooseongY/Go-RIO.
GaRLIO: Gravity enhanced Radar-LiDAR-Inertial Odometry
Feb 11, 2025Recently, gravity has been highlighted as a crucial constraint for state estimation to alleviate potential vertical drift. Existing online gravity estimation methods rely on pose estimation combined with IMU measurements, which is considered best practice when direct velocity measurements are unavailable. However, with radar sensors providing direct velocity data-a measurement not yet utilized for gravity estimation-we found a significant opportunity to improve gravity estimation accuracy substantially. GaRLIO, the proposed gravity-enhanced Radar-LiDAR-Inertial Odometry, can robustly predict gravity to reduce vertical drift while simultaneously enhancing state estimation performance using pointwise velocity measurements. Furthermore, GaRLIO ensures robustness in dynamic environments by utilizing radar to remove dynamic objects from LiDAR point clouds. Our method is validated through experiments in various environments prone to vertical drift, demonstrating superior performance compared to traditional LiDAR-Inertial Odometry methods. We make our source code publicly available to encourage further research and development. https://github.com/ChiyunNoh/GaRLIO
HeRCULES: Heterogeneous Radar Dataset in Complex Urban Environment for Multi-session Radar SLAM
Feb 04, 2025Recently, radars have been widely featured in robotics for their robustness in challenging weather conditions. Two commonly used radar types are spinning radars and phased-array radars, each offering distinct sensor characteristics. Existing datasets typically feature only a single type of radar, leading to the development of algorithms limited to that specific kind. In this work, we highlight that combining different radar types offers complementary advantages, which can be leveraged through a heterogeneous radar dataset. Moreover, this new dataset fosters research in multi-session and multi-robot scenarios where robots are equipped with different types of radars. In this context, we introduce the HeRCULES dataset, a comprehensive, multi-modal dataset with heterogeneous radars, FMCW LiDAR, IMU, GPS, and cameras. This is the first dataset to integrate 4D radar and spinning radar alongside FMCW LiDAR, offering unparalleled localization, mapping, and place recognition capabilities. The dataset covers diverse weather and lighting conditions and a range of urban traffic scenarios, enabling a comprehensive analysis across various environments. The sequence paths with multiple revisits and ground truth pose for each sensor enhance its suitability for place recognition research. We expect the HeRCULES dataset to facilitate odometry, mapping, place recognition, and sensor fusion research. The dataset and development tools are available at https://sites.google.com/view/herculesdataset.
MOANA: Multi-Radar Dataset for Maritime Odometry and Autonomous Navigation Application
Dec 05, 2024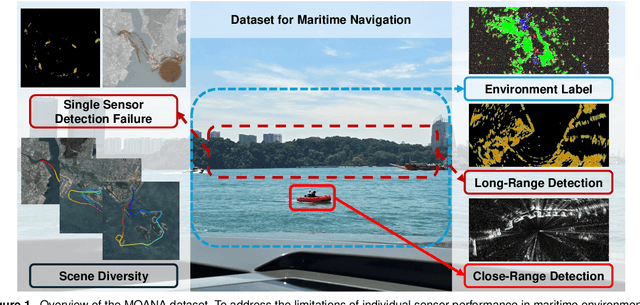
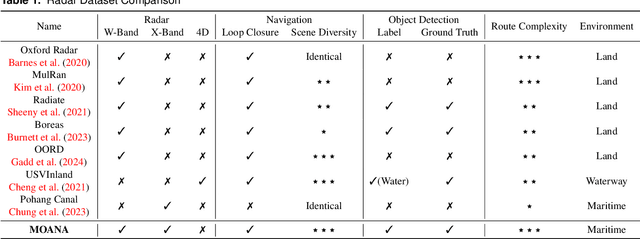
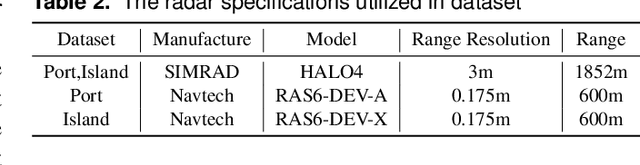
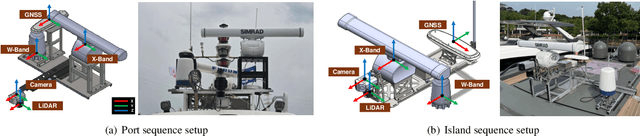
Maritime environmental sensing requires overcoming challenges from complex conditions such as harsh weather, platform perturbations, large dynamic objects, and the requirement for long detection ranges. While cameras and LiDAR are commonly used in ground vehicle navigation, their applicability in maritime settings is limited by range constraints and hardware maintenance issues. Radar sensors, however, offer robust long-range detection capabilities and resilience to physical contamination from weather and saline conditions, making it a powerful sensor for maritime navigation. Among various radar types, X-band radar (e.g., marine radar) is widely employed for maritime vessel navigation, providing effective long-range detection essential for situational awareness and collision avoidance. Nevertheless, it exhibits limitations during berthing operations where close-range object detection is critical. To address this shortcoming, we incorporate W-band radar (e.g., Navtech imaging radar), which excels in detecting nearby objects with a higher update rate. We present a comprehensive maritime sensor dataset featuring multi-range detection capabilities. This dataset integrates short-range LiDAR data, medium-range W-band radar data, and long-range X-band radar data into a unified framework. Additionally, it includes object labels for oceanic object detection usage, derived from radar and stereo camera images. The dataset comprises seven sequences collected from diverse regions with varying levels of estimation difficulty, ranging from easy to challenging, and includes common locations suitable for global localization tasks. This dataset serves as a valuable resource for advancing research in place recognition, odometry estimation, SLAM, object detection, and dynamic object elimination within maritime environments. Dataset can be found in following link: https://sites.google.com/view/rpmmoana
Item Cluster-aware Prompt Learning for Session-based Recommendation
Oct 07, 2024



Session-based recommendation (SBR) aims to capture dynamic user preferences by analyzing item sequences within individual sessions. However, most existing approaches focus mainly on intra-session item relationships, neglecting the connections between items across different sessions (inter-session relationships), which limits their ability to fully capture complex item interactions. While some methods incorporate inter-session information, they often suffer from high computational costs, leading to longer training times and reduced efficiency. To address these challenges, we propose the CLIP-SBR (Cluster-aware Item Prompt learning for Session-Based Recommendation) framework. CLIP-SBR is composed of two modules: 1) an item relationship mining module that builds a global graph to effectively model both intra- and inter-session relationships, and 2) an item cluster-aware prompt learning module that uses soft prompts to integrate these relationships into SBR models efficiently. We evaluate CLIP-SBR across eight SBR models and three benchmark datasets, consistently demonstrating improved recommendation performance and establishing CLIP-SBR as a robust solution for session-based recommendation tasks.
Co-RaL: Complementary Radar-Leg Odometry with 4-DoF Optimization and Rolling Contact
Jul 10, 2024Robust and accurate localization in challenging environments is becoming crucial for SLAM. In this paper, we propose a unique sensor configuration for precise and robust odometry by integrating chip radar and a legged robot. Specifically, we introduce a tightly coupled radar-leg odometry algorithm for complementary drift correction. Adopting the 4-DoF optimization and decoupled RANSAC to mmWave chip radar significantly enhances radar odometry beyond the existing method, especially z-directional even when using a single radar. For the leg odometry, we employ rolling contact modeling-aided forward kinematics, accommodating scenarios with the potential possibility of contact drift and radar failure. We evaluate our method by comparing it with other chip radar odometry algorithms using real-world datasets with diverse environments while the datasets will be released for the robotics community. https://github.com/SangwooJung98/Co-RaL-Dataset