 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXPRESS: X-Band Radar Place Recognition via Elliptical Scan Shaping
Nov 12, 2025



X-band radar serves as the primary sensor on maritime vessels, however, its application in autonomous navigation has been limited due to low sensor resolution and insufficient information content. To enable X-band radar-only autonomous navigation in maritime environments, this paper proposes a place recognition algorithm specifically tailored for X-band radar, incorporating an object density-based rule for efficient candidate selection and intentional degradation of radar detections to achieve robust retrieval performance. The proposed algorithm was evaluated on both public maritime radar datasets and our own collected dataset, and its performance was compared against state-of-the-art radar place recognition methods. An ablation study was conducted to assess the algorithm's performance sensitivity with respect to key parameters.
* 9 pages, 9 figures, Published in IEEE RA-L
MOANA: Multi-Radar Dataset for Maritime Odometry and Autonomous Navigation Application
Dec 05, 2024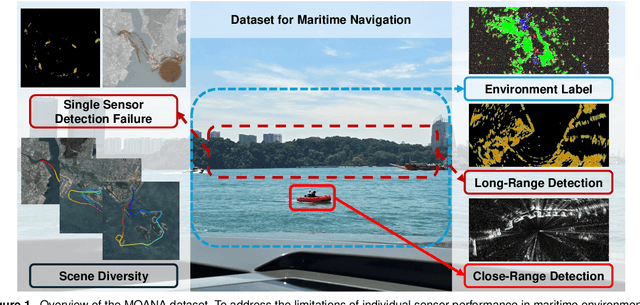
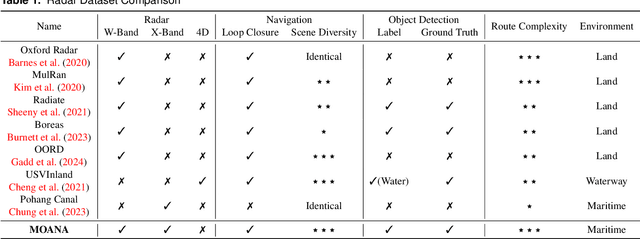
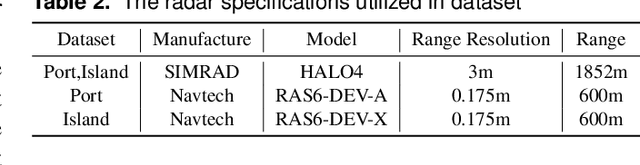
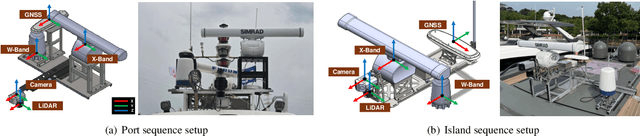
Maritime environmental sensing requires overcoming challenges from complex conditions such as harsh weather, platform perturbations, large dynamic objects, and the requirement for long detection ranges. While cameras and LiDAR are commonly used in ground vehicle navigation, their applicability in maritime settings is limited by range constraints and hardware maintenance issues. Radar sensors, however, offer robust long-range detection capabilities and resilience to physical contamination from weather and saline conditions, making it a powerful sensor for maritime navigation. Among various radar types, X-band radar (e.g., marine radar) is widely employed for maritime vessel navigation, providing effective long-range detection essential for situational awareness and collision avoidance. Nevertheless, it exhibits limitations during berthing operations where close-range object detection is critical. To address this shortcoming, we incorporate W-band radar (e.g., Navtech imaging radar), which excels in detecting nearby objects with a higher update rate. We present a comprehensive maritime sensor dataset featuring multi-range detection capabilities. This dataset integrates short-range LiDAR data, medium-range W-band radar data, and long-range X-band radar data into a unified framework. Additionally, it includes object labels for oceanic object detection usage, derived from radar and stereo camera images. The dataset comprises seven sequences collected from diverse regions with varying levels of estimation difficulty, ranging from easy to challenging, and includes common locations suitable for global localization tasks. This dataset serves as a valuable resource for advancing research in place recognition, odometry estimation, SLAM, object detection, and dynamic object elimination within maritime environments. Dataset can be found in following link: https://sites.google.com/view/rpmmoana
Introducing VaDA: Novel Image Segmentation Model for Maritime Object Segmentation Using New Dataset
Jul 12, 2024



The maritime shipping industry is undergoing rapid evolution driven by advancements in computer vision artificial intelligence (AI). Consequently, research on AI-based object recognition models for maritime transportation is steadily growing, leveraging advancements in sensor technology and computing performance. However, object recognition in maritime environments faces challenges such as light reflection, interference, intense lighting, and various weather conditions. To address these challenges, high-performance deep learning algorithms tailored to maritime imagery and high-quality datasets specialized for maritime scenes are essential. Existing AI recognition models and datasets have limited suitability for composing autonomous navigation systems. Therefore, in this paper, we propose a Vertical and Detail Attention (VaDA) model for maritime object segmentation and a new model evaluation method, the Integrated Figure of Calculation Performance (IFCP), to verify its suitability for the system in real-time. Additionally, we introduce a benchmark maritime dataset, OASIs (Ocean AI Segmentation Initiatives) to standardize model performance evaluation across diverse maritime environments. OASIs dataset and details are available at our website: https://www.navlue.com/dataset