 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaRLILEO: Gravity-aligned Radar-Leg-Inertial Enhanced Odometry
Nov 17, 2025Deployment of legged robots for navigating challenging terrains (e.g., stairs, slopes, and unstructured environments) has gained increasing preference over wheel-based platforms. In such scenarios, accurate odometry estimation is a preliminary requirement for stable locomotion, localization, and mapping. Traditional proprioceptive approaches, which rely on leg kinematics sensor modalities and inertial sensing, suffer from irrepressible vertical drift caused by frequent contact impacts, foot slippage, and vibrations, particularly affected by inaccurate roll and pitch estimation. Existing methods incorporate exteroceptive sensors such as LiDAR or cameras. Further enhancement has been introduced by leveraging gravity vector estimation to add additional observations on roll and pitch, thereby increasing the accuracy of vertical pose estimation. However, these approaches tend to degrade in feature-sparse or repetitive scenes and are prone to errors from double-integrated IMU acceleration. To address these challenges, we propose GaRLILEO, a novel gravity-aligned continuous-time radar-leg-inertial odometry framework. GaRLILEO decouples velocity from the IMU by building a continuous-time ego-velocity spline from SoC radar Doppler and leg kinematics information, enabling seamless sensor fusion which mitigates odometry distortion. In addition, GaRLILEO can reliably capture accurate gravity vectors leveraging a novel soft S2-constrained gravity factor, improving vertical pose accuracy without relying on LiDAR or cameras. Evaluated on a self-collected real-world dataset with diverse indoor-outdoor trajectories, GaRLILEO demonstrates state-of-the-art accuracy, particularly in vertical odometry estimation on stairs and slopes. We open-source both our dataset and algorithm to foster further research in legged robot odometry and SLAM. https://garlileo.github.io/GaRLILEO
GaRLIO: Gravity enhanced Radar-LiDAR-Inertial Odometry
Feb 11, 2025Recently, gravity has been highlighted as a crucial constraint for state estimation to alleviate potential vertical drift. Existing online gravity estimation methods rely on pose estimation combined with IMU measurements, which is considered best practice when direct velocity measurements are unavailable. However, with radar sensors providing direct velocity data-a measurement not yet utilized for gravity estimation-we found a significant opportunity to improve gravity estimation accuracy substantially. GaRLIO, the proposed gravity-enhanced Radar-LiDAR-Inertial Odometry, can robustly predict gravity to reduce vertical drift while simultaneously enhancing state estimation performance using pointwise velocity measurements. Furthermore, GaRLIO ensures robustness in dynamic environments by utilizing radar to remove dynamic objects from LiDAR point clouds. Our method is validated through experiments in various environments prone to vertical drift, demonstrating superior performance compared to traditional LiDAR-Inertial Odometry methods. We make our source code publicly available to encourage further research and development. https://github.com/ChiyunNoh/GaRLIO
HeRCULES: Heterogeneous Radar Dataset in Complex Urban Environment for Multi-session Radar SLAM
Feb 04, 2025
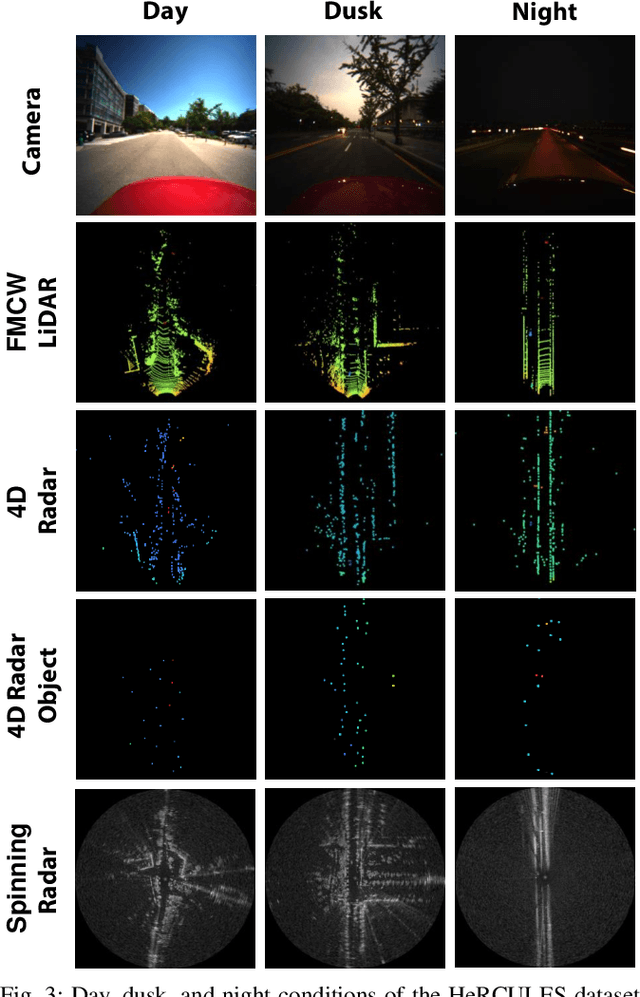


Recently, radars have been widely featured in robotics for their robustness in challenging weather conditions. Two commonly used radar types are spinning radars and phased-array radars, each offering distinct sensor characteristics. Existing datasets typically feature only a single type of radar, leading to the development of algorithms limited to that specific kind. In this work, we highlight that combining different radar types offers complementary advantages, which can be leveraged through a heterogeneous radar dataset. Moreover, this new dataset fosters research in multi-session and multi-robot scenarios where robots are equipped with different types of radars. In this context, we introduce the HeRCULES dataset, a comprehensive, multi-modal dataset with heterogeneous radars, FMCW LiDAR, IMU, GPS, and cameras. This is the first dataset to integrate 4D radar and spinning radar alongside FMCW LiDAR, offering unparalleled localization, mapping, and place recognition capabilities. The dataset covers diverse weather and lighting conditions and a range of urban traffic scenarios, enabling a comprehensive analysis across various environments. The sequence paths with multiple revisits and ground truth pose for each sensor enhance its suitability for place recognition research. We expect the HeRCULES dataset to facilitate odometry, mapping, place recognition, and sensor fusion research. The dataset and development tools are available at https://sites.google.com/view/herculesdataset.
Adaptive LiDAR-Radar Fusion for Outdoor Odometry Across Dense Smoke Conditions
Mar 26, 2024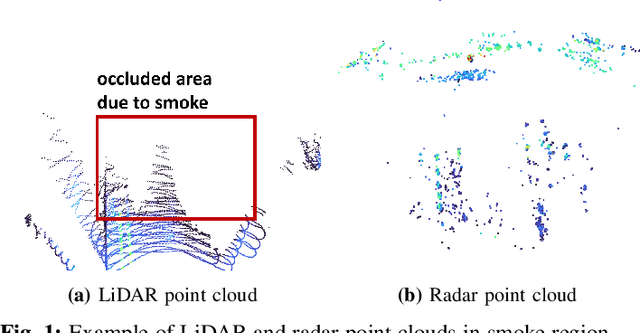
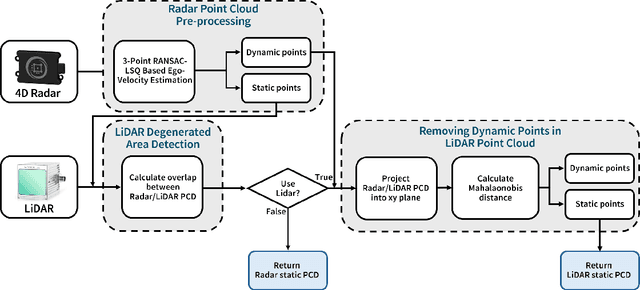
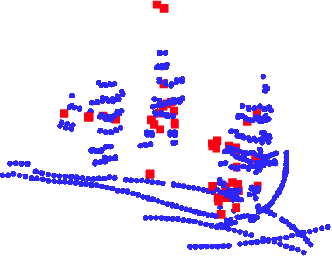
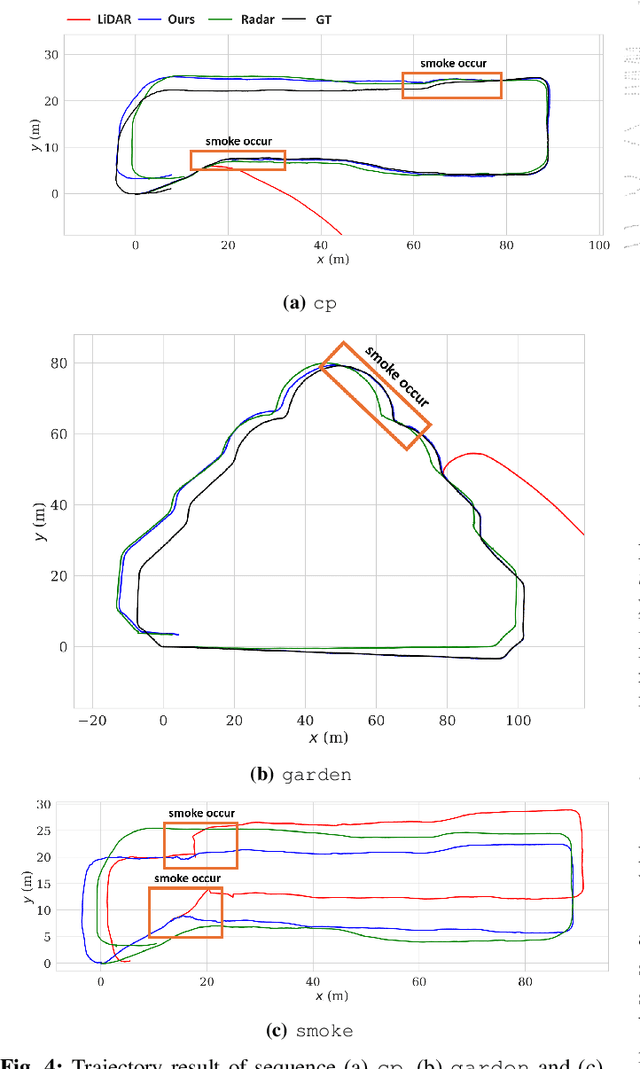
Robust odometry estimation in perceptually degraded environments represents a key challenge in the field of robotics. In this paper, we propose a LiDAR-radar fusion method for robust odometry for adverse environment with LiDAR degeneracy. By comparing the LiDAR point cloud with the radar static point cloud obtained through preprocessing module, it is possible to identify instances of LiDAR degeneracy to overcome perceptual limits. We demonstrate the effectiveness of our method in challenging conditions such as dense smoke, showcasing its ability to reliably estimate odometry and identify/remove dynamic points prone to LiDAR degeneracy.