 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-Shot Multi-Hop Question Answering via Monte-Carlo Tree Search with Large Language Models
Sep 28, 2024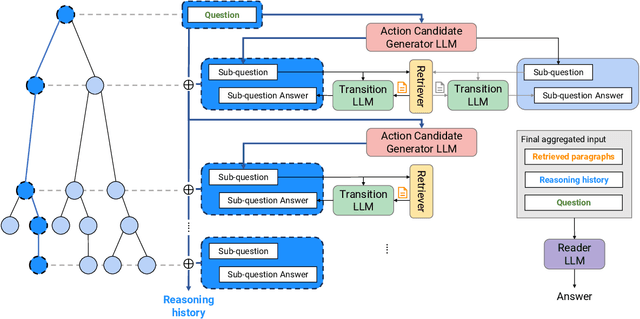
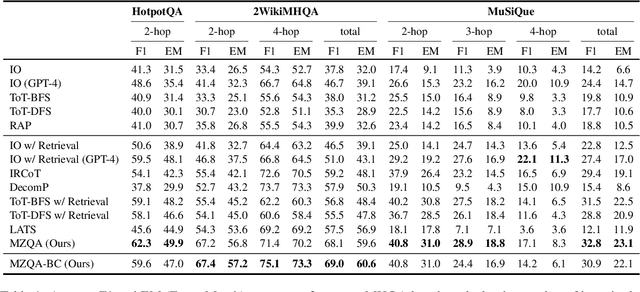
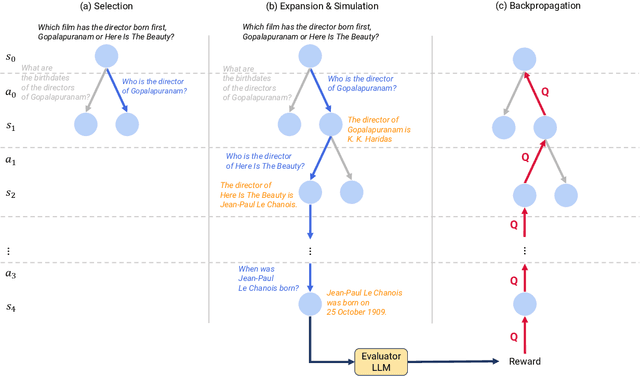
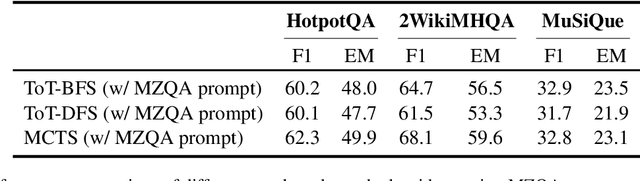
Recent advances in large language models (LLMs) have significantly impacted the domain of multi-hop question answering (MHQA), where systems are required to aggregate information and infer answers from disparate pieces of text. However, the autoregressive nature of LLMs inherently poses a challenge as errors may accumulate if mistakes are made in the intermediate reasoning steps. This paper introduces Monte-Carlo tree search for Zero-shot multi-hop Question Answering (MZQA), a framework based on Monte-Carlo tree search (MCTS) to identify optimal reasoning paths in MHQA tasks, mitigating the error propagation from sequential reasoning processes. Unlike previous works, we propose a zero-shot prompting method, which relies solely on instructions without the support of hand-crafted few-shot examples that typically require domain expertise. We also introduce a behavioral cloning approach (MZQA-BC) trained on self-generated MCTS inference trajectories, achieving an over 10-fold increase in reasoning speed with bare compromise in performance. The efficacy of our method is validated on standard benchmarks such as HotpotQA, 2WikiMultihopQA, and MuSiQue, demonstrating that it outperforms existing frameworks.
Design and Operation of Autonomous Wheelchair Towing Robot
May 23, 2023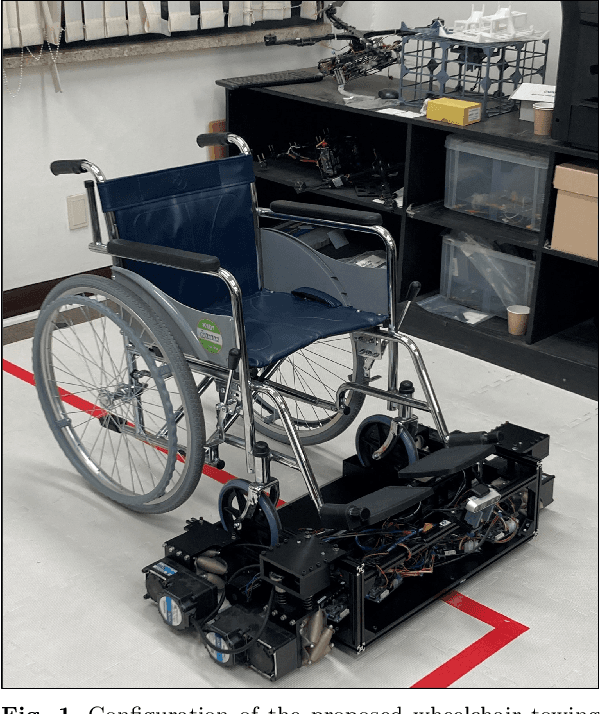


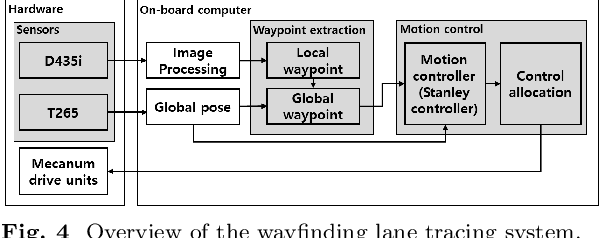
In this study, a new concept of a wheelchair-towing robot for the facile electrification of manual wheelchairs is introduced. The development of this concept includes the design of towing robot hardware and an autonomous driving algorithm to ensure the safe transportation of patients to their intended destinations inside the hospital. We developed a novel docking mechanism to facilitate easy docking and separation between the towing robot and the manual wheelchair, which is connected to the front caster wheel of the manual wheelchair. The towing robot has a mecanum wheel drive, enabling the robot to move with a high degree of freedom in the standalone driving mode while adhering to kinematic constraints in the docking mode. Our novel towing robot features a camera sensor that can observe the ground ahead which allows the robot to autonomously follow color-coded wayfinding lanes installed in hospital corridors. This study introduces dedicated image processing techniques for capturing the lanes and control algorithms for effectively tracing a path to achieve autonomous path following. The autonomous towing performance of our proposed platform was validated by a real-world experiment in which a hospital environment with colored lanes was created.