 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical control and learning of a foraging CyberOctopus
Feb 11, 2023Inspired by the unique neurophysiology of the octopus, we propose a hierarchical framework that simplifies the coordination of multiple soft arms by decomposing control into high-level decision making, low-level motor activation, and local reflexive behaviors via sensory feedback. When evaluated in the illustrative problem of a model octopus foraging for food, this hierarchical decomposition results in significant improvements relative to end-to-end methods. Performance is achieved through a mixed-modes approach, whereby qualitatively different tasks are addressed via complementary control schemes. Here, model-free reinforcement learning is employed for high-level decision-making, while model-based energy shaping takes care of arm-level motor execution. To render the pairing computationally tenable, a novel neural-network energy shaping (NN-ES) controller is developed, achieving accurate motions with time-to-solutions 200 times faster than previous attempts. Our hierarchical framework is then successfully deployed in increasingly challenging foraging scenarios, including an arena littered with obstacles in 3D space, demonstrating the viability of our approach.
A physics-informed, vision-based method to reconstruct all deformation modes in slender bodies
Sep 17, 2021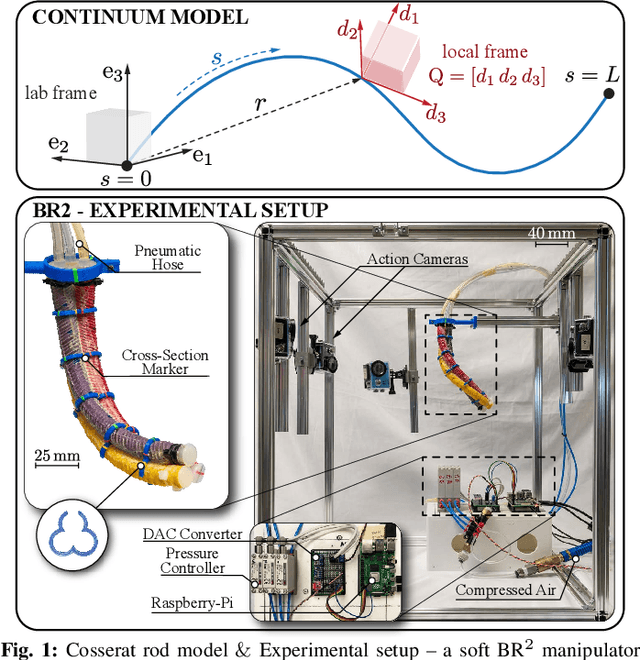
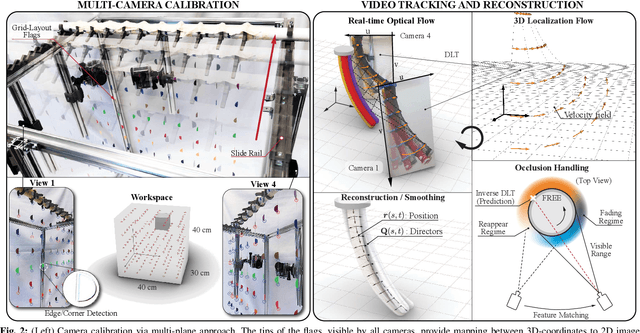
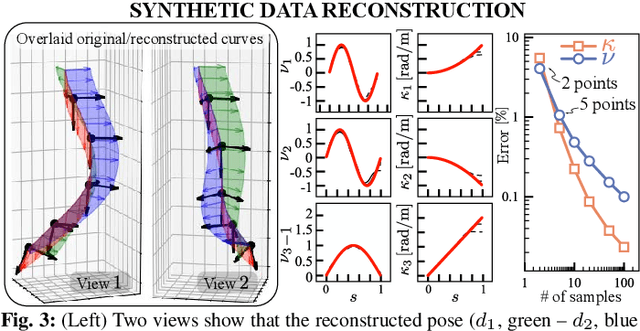
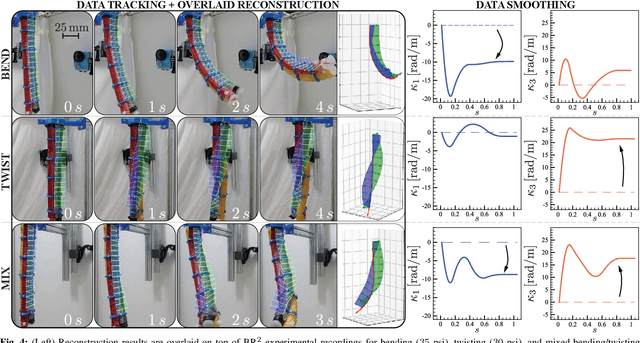
This paper is concerned with the problem of estimating (interpolating and smoothing) the shape (pose and the six modes of deformation) of a slender flexible body from multiple camera measurements. This problem is important in both biology, where slender, soft, and elastic structures are ubiquitously encountered across species, and in engineering, particularly in the area of soft robotics. The proposed mathematical formulation for shape estimation is physics-informed, based on the use of the special Cosserat rod theory whose equations encode slender body mechanics in the presence of bending, shearing, twisting and stretching. The approach is used to derive numerical algorithms which are experimentally demonstrated for fiber reinforced and cable-driven soft robot arms. These experimental demonstrations show that the methodology is accurate (<5 mm error, three times less than the arm diameter) and robust to noise and uncertainties.
Robust Translational Force Control of Multi-Rotor UAV for Precise Acceleration Tracking
Aug 14, 2019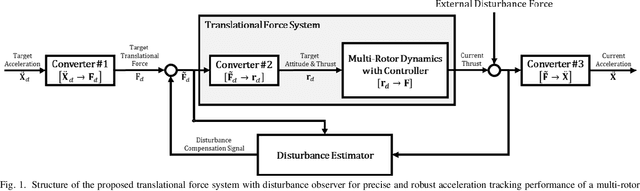
In this paper, we introduce a translational force control method with disturbance observer (DOB)-based force disturbance cancellation for precise three-dimensional acceleration control of a multi-rotor UAV. The acceleration control of the multi-rotor requires conversion of the desired acceleration signal to the desired roll, pitch, and total thrust. But because the attitude dynamics and the thrust dynamics are different, simple kinematic signal conversion without consideration of those difference can cause serious performance degradation in acceleration tracking. Unlike most existing translational force control techniques that are based on such simple inversion, our new method allows controlling the acceleration of the multi-rotor more precisely by considering the dynamics of the multi-rotor during the kinematic inversion. By combining the DOB with the translational force system that includes the improved conversion technique, we achieve robustness with respect to the external force disturbances that hinders the accurate acceleration control. mu-analysis is performed to ensure the robust stability of the overall closed-loop system, considering the combined effect of various possible model uncertainties. Both simulation and experiment are conducted to validate the proposed technique, which confirms the satisfactory performance to track the desired acceleration of the multi-rotor.