 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScan Context++: Structural Place Recognition Robust to Rotation and Lateral Variations in Urban Environments
Paper and Code

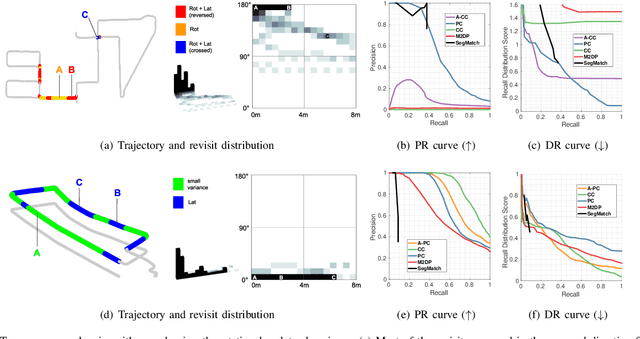
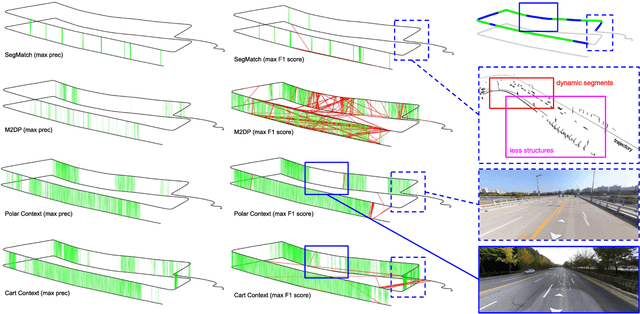
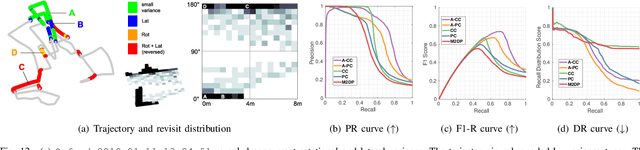
Place recognition is a key module in robotic navigation. The existing line of studies mostly focuses on visual place recognition to recognize previously visited places solely based on their appearance. In this paper, we address structural place recognition by recognizing a place based on structural appearance, namely from range sensors. Extending our previous work on a rotation invariant spatial descriptor, the proposed descriptor completes a generic descriptor robust to both rotation (heading) and translation when roll-pitch motions are not severe. We introduce two sub-descriptors and enable topological place retrieval followed by the 1-DOF semi-metric localization thereby bridging the gap between topological place retrieval and metric localization. The proposed method has been evaluated thoroughly in terms of environmental complexity and scale. The source code is available and can easily be integrated into existing LiDAR simultaneous localization and mapping (SLAM).