 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeALIGN: Advanced Query Initialization with LiDAR-Image Guidance for Occlusion-Robust 3D Object Detection
Dec 20, 2025

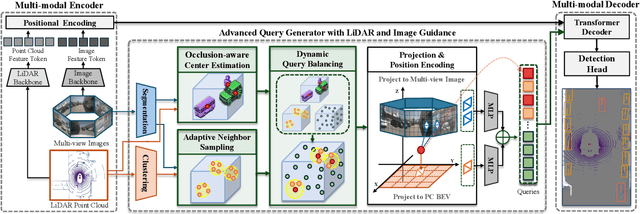

Recent query-based 3D object detection methods using camera and LiDAR inputs have shown strong performance, but existing query initialization strategies,such as random sampling or BEV heatmap-based sampling, often result in inefficient query usage and reduced accuracy, particularly for occluded or crowded objects. To address this limitation, we propose ALIGN (Advanced query initialization with LiDAR and Image GuidaNce), a novel approach for occlusion-robust, object-aware query initialization. Our model consists of three key components: (i) Occlusion-aware Center Estimation (OCE), which integrates LiDAR geometry and image semantics to estimate object centers accurately (ii) Adaptive Neighbor Sampling (ANS), which generates object candidates from LiDAR clustering and supplements each object by sampling spatially and semantically aligned points around it and (iii) Dynamic Query Balancing (DQB), which adaptively balances queries between foreground and background regions. Our extensive experiments on the nuScenes benchmark demonstrate that ALIGN consistently improves performance across multiple state-of-the-art detectors, achieving gains of up to +0.9 mAP and +1.2 NDS, particularly in challenging scenes with occlusions or dense crowds. Our code will be publicly available upon publication.
Mitigating Trade-off: Stream and Query-guided Aggregation for Efficient and Effective 3D Occupancy Prediction
Mar 28, 2025



3D occupancy prediction has emerged as a key perception task for autonomous driving, as it reconstructs 3D environments to provide a comprehensive scene understanding. Recent studies focus on integrating spatiotemporal information obtained from past observations to improve prediction accuracy, using a multi-frame fusion approach that processes multiple past frames together. However, these methods struggle with a trade-off between efficiency and accuracy, which significantly limits their practicality. To mitigate this trade-off, we propose StreamOcc, a novel framework that aggregates spatio-temporal information in a stream-based manner. StreamOcc consists of two key components: (i) Stream-based Voxel Aggregation, which effectively accumulates past observations while minimizing computational costs, and (ii) Query-guided Aggregation, which recurrently aggregates instance-level features of dynamic objects into corresponding voxel features, refining fine-grained details of dynamic objects. Experiments on the Occ3D-nuScenes dataset show that StreamOcc achieves state-of-the-art performance in real-time settings, while reducing memory usage by more than 50% compared to previous methods.
GUIDE-CoT: Goal-driven and User-Informed Dynamic Estimation for Pedestrian Trajectory using Chain-of-Thought
Mar 10, 2025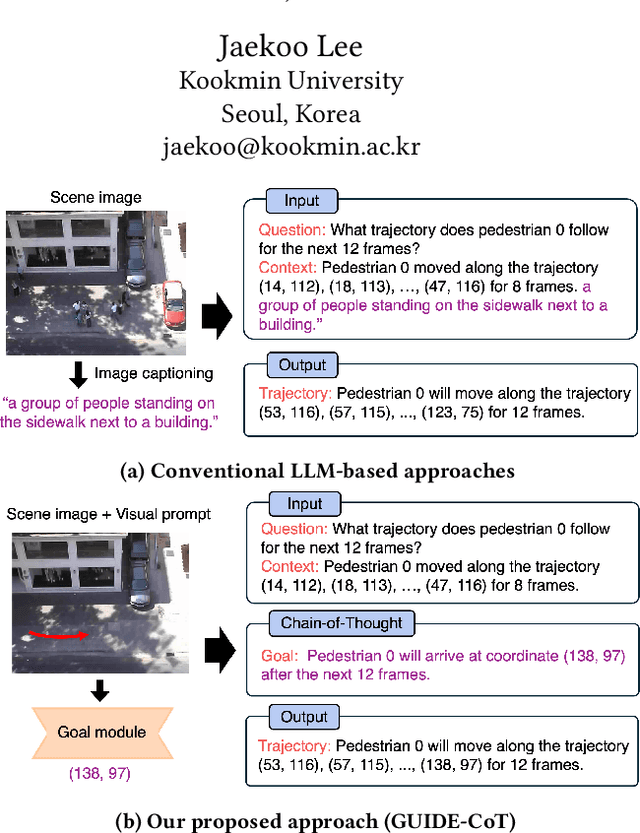

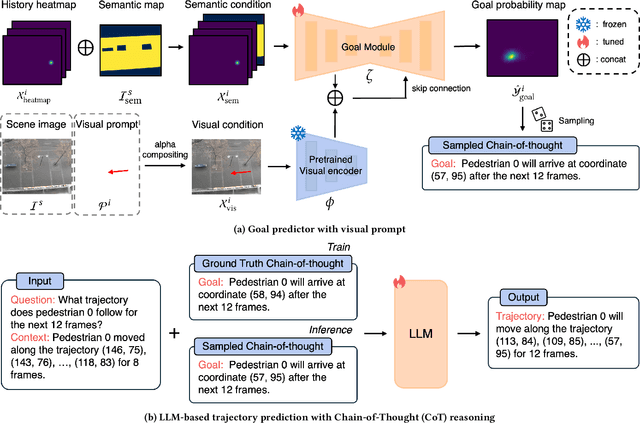

While Large Language Models (LLMs) have recently shown impressive results in reasoning tasks, their application to pedestrian trajectory prediction remains challenging due to two key limitations: insufficient use of visual information and the difficulty of predicting entire trajectories. To address these challenges, we propose Goal-driven and User-Informed Dynamic Estimation for pedestrian trajectory using Chain-of-Thought (GUIDE-CoT). Our approach integrates two innovative modules: (1) a goal-oriented visual prompt, which enhances goal prediction accuracy combining visual prompts with a pretrained visual encoder, and (2) a chain-of-thought (CoT) LLM for trajectory generation, which generates realistic trajectories toward the predicted goal. Moreover, our method introduces controllable trajectory generation, allowing for flexible and user-guided modifications to the predicted paths. Through extensive experiments on the ETH/UCY benchmark datasets, our method achieves state-of-the-art performance, delivering both high accuracy and greater adaptability in pedestrian trajectory prediction. Our code is publicly available at https://github.com/ai-kmu/GUIDE-CoT.