 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSKiD-SLAM: Robust, Lightweight, and Distributed Multi-Robot LiDAR SLAM in Resource-Constrained Field Environments
May 13, 2025Distributed LiDAR SLAM is crucial for achieving efficient robot autonomy and improving the scalability of mapping. However, two issues need to be considered when applying it in field environments: one is resource limitation, and the other is inter/intra-robot association. The resource limitation issue arises when the data size exceeds the processing capacity of the network or memory, especially when utilizing communication systems or onboard computers in the field. The inter/intra-robot association issue occurs due to the narrow convergence region of ICP under large viewpoint differences, triggering many false positive loops and ultimately resulting in an inconsistent global map for multi-robot systems. To tackle these problems, we propose a distributed LiDAR SLAM framework designed for versatile field applications, called SKiD-SLAM. Extending our previous work that solely focused on lightweight place recognition and fast and robust global registration, we present a multi-robot mapping framework that focuses on robust and lightweight inter-robot loop closure in distributed LiDAR SLAM. Through various environmental experiments, we demonstrate that our method is more robust and lightweight compared to other state-of-the-art distributed SLAM approaches, overcoming resource limitation and inter/intra-robot association issues. Also, we validated the field applicability of our approach through mapping experiments in real-world planetary emulation terrain and cave environments, which are in-house datasets. Our code will be available at https://sparolab.github.io/research/skid_slam/.
PoLaRIS Dataset: A Maritime Object Detection and Tracking Dataset in Pohang Canal
Dec 09, 2024Maritime environments often present hazardous situations due to factors such as moving ships or buoys, which become obstacles under the influence of waves. In such challenging conditions, the ability to detect and track potentially hazardous objects is critical for the safe navigation of marine robots. To address the scarcity of comprehensive datasets capturing these dynamic scenarios, we introduce a new multi-modal dataset that includes image and point-wise annotations of maritime hazards. Our dataset provides detailed ground truth for obstacle detection and tracking, including objects as small as 10$\times$10 pixels, which are crucial for maritime safety. To validate the dataset's effectiveness as a reliable benchmark, we conducted evaluations using various methodologies, including \ac{SOTA} techniques for object detection and tracking. These evaluations are expected to contribute to performance improvements, particularly in the complex maritime environment. To the best of our knowledge, this is the first dataset offering multi-modal annotations specifically tailored to maritime environments. Our dataset is available at https://sites.google.com/view/polaris-dataset.
Narrowing your FOV with SOLiD: Spatially Organized and Lightweight Global Descriptor for FOV-constrained LiDAR Place Recognition
Aug 14, 2024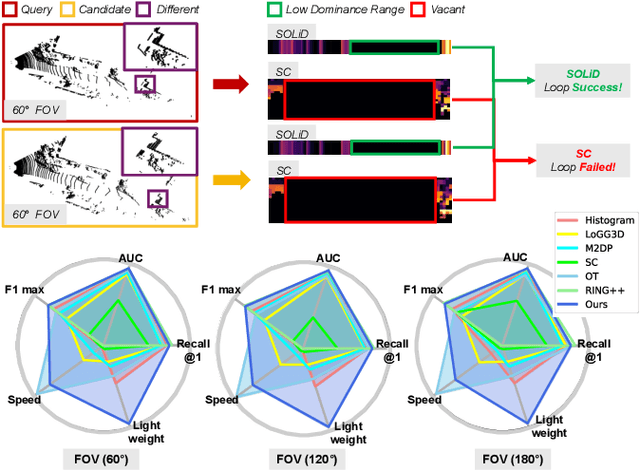

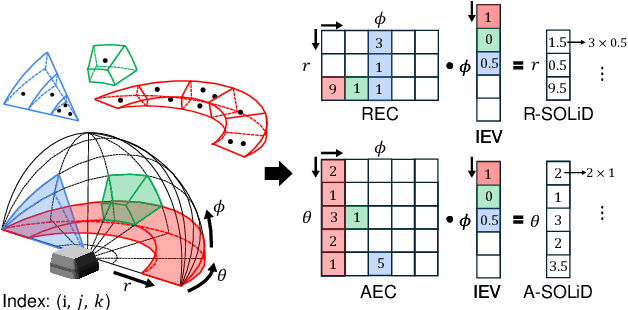

We often encounter limited FOV situations due to various factors such as sensor fusion or sensor mount in real-world robot navigation. However, the limited FOV interrupts the generation of descriptions and impacts place recognition adversely. Therefore, we suffer from correcting accumulated drift errors in a consistent map using LiDAR-based place recognition with limited FOV. Thus, in this paper, we propose a robust LiDAR-based place recognition method for handling narrow FOV scenarios. The proposed method establishes spatial organization based on the range-elevation bin and azimuth-elevation bin to represent places. In addition, we achieve a robust place description through reweighting based on vertical direction information. Based on these representations, our method enables addressing rotational changes and determining the initial heading. Additionally, we designed a lightweight and fast approach for the robot's onboard autonomy. For rigorous validation, the proposed method was tested across various LiDAR place recognition scenarios (i.e., single-session, multi-session, and multi-robot scenarios). To the best of our knowledge, we report the first method to cope with the restricted FOV. Our place description and SLAM codes will be released. Also, the supplementary materials of our descriptor are available at \texttt{\url{https://sites.google.com/view/lidar-solid}}.