 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShoulder Range of Motion Rehabilitation Robot Incorporating Scapulohumeral Rhythm for Frozen Shoulder
Apr 14, 2025This paper presents a novel rehabilitation robot designed to address the challenges of passive range of motion (PROM) exercises for frozen shoulder patients by integrating advanced scapulohumeral rhythm stabilization. Frozen shoulder is characterized by limited glenohumeral motion and disrupted scapulohumeral rhythm, with therapist-assisted interventions being highly effective for restoring normal shoulder function. While existing robotic solutions replicate natural shoulder biomechanics, they lack the ability to stabilize compensatory movements, such as shoulder shrugging, which are critical for effective rehabilitation. Our proposed device features a 6 degrees of freedom (DoF) mechanism, including 5 DoF for shoulder motion and an innovative 1 DoF Joint press for scapular stabilization. The robot employs a personalized two-phase operation: recording normal shoulder movement patterns from the unaffected side and applying them to guide the affected side. Experimental results demonstrated the robot's ability to replicate recorded motion patterns with high precision, with root mean square error (RMSE) values consistently below 1 degree. In simulated frozen shoulder conditions, the robot effectively suppressed scapular elevation, delaying the onset of compensatory movements and guiding the affected shoulder to move more closely in alignment with normal shoulder motion, particularly during arm elevation movements such as abduction and flexion. These findings confirm the robot's potential as a rehabilitation tool capable of automating PROM exercises while correcting compensatory movements. The system provides a foundation for advanced, personalized rehabilitation for patients with frozen shoulders.
PoLaRIS Dataset: A Maritime Object Detection and Tracking Dataset in Pohang Canal
Dec 09, 2024Maritime environments often present hazardous situations due to factors such as moving ships or buoys, which become obstacles under the influence of waves. In such challenging conditions, the ability to detect and track potentially hazardous objects is critical for the safe navigation of marine robots. To address the scarcity of comprehensive datasets capturing these dynamic scenarios, we introduce a new multi-modal dataset that includes image and point-wise annotations of maritime hazards. Our dataset provides detailed ground truth for obstacle detection and tracking, including objects as small as 10$\times$10 pixels, which are crucial for maritime safety. To validate the dataset's effectiveness as a reliable benchmark, we conducted evaluations using various methodologies, including \ac{SOTA} techniques for object detection and tracking. These evaluations are expected to contribute to performance improvements, particularly in the complex maritime environment. To the best of our knowledge, this is the first dataset offering multi-modal annotations specifically tailored to maritime environments. Our dataset is available at https://sites.google.com/view/polaris-dataset.
Generic Camera Attribute Control using Bayesian Optimization
Aug 14, 2018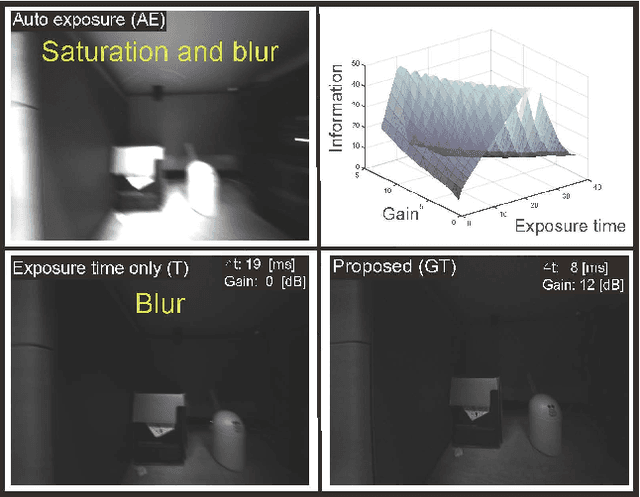
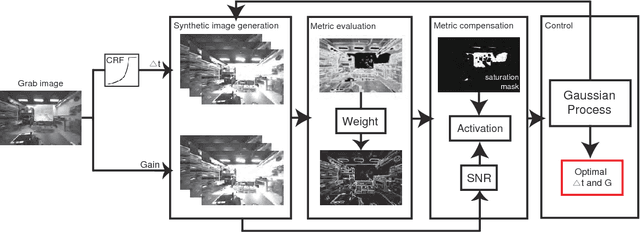
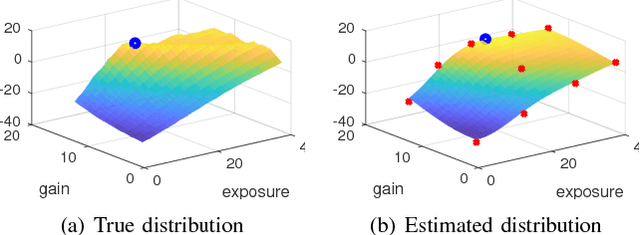
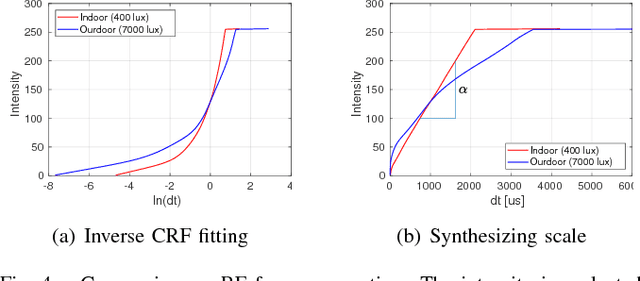
Cameras are the most widely exploited sensor in both robotics and computer vision communities. Despite their popularity, two dominant attributes (i.e., gain and exposure time) have been determined empirically and images are captured in very passive manner. In this paper, we present an active and generic camera attribute control scheme using Bayesian optimization. We extend from our previous work [1] in two aspects. First, we propose a method that jointly controls camera gain and exposure time. Secondly, to speed up the Bayesian optimization process, we introduce image synthesis using the camera response function (CRF). These synthesized images allowed us to diminish the image acquisition time during the Bayesian optimization phase, substantially improving overall control performance. The proposed method is validated both in an indoor and an outdoor environment where light condition rapidly changes. Supplementary material is available at https://youtu.be/XTYR_Mih3OU .