 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCtx2TrajGen: Traffic Context-Aware Microscale Vehicle Trajectories using Generative Adversarial Imitation Learning
Jul 23, 2025



Precise modeling of microscopic vehicle trajectories is critical for traffic behavior analysis and autonomous driving systems. We propose Ctx2TrajGen, a context-aware trajectory generation framework that synthesizes realistic urban driving behaviors using GAIL. Leveraging PPO and WGAN-GP, our model addresses nonlinear interdependencies and training instability inherent in microscopic settings. By explicitly conditioning on surrounding vehicles and road geometry, Ctx2TrajGen generates interaction-aware trajectories aligned with real-world context. Experiments on the drone-captured DRIFT dataset demonstrate superior performance over existing methods in terms of realism, behavioral diversity, and contextual fidelity, offering a robust solution to data scarcity and domain shift without simulation.
TRIP: Terrain Traversability Mapping With Risk-Aware Prediction for Enhanced Online Quadrupedal Robot Navigation
Nov 26, 2024



Accurate traversability estimation using an online dense terrain map is crucial for safe navigation in challenging environments like construction and disaster areas. However, traversability estimation for legged robots on rough terrains faces substantial challenges owing to limited terrain information caused by restricted field-of-view, and data occlusion and sparsity. To robustly map traversable regions, we introduce terrain traversability mapping with risk-aware prediction (TRIP). TRIP reconstructs the terrain maps while predicting multi-modal traversability risks, enhancing online autonomous navigation with the following contributions. Firstly, estimating steppability in a spherical projection space allows for addressing data sparsity while accomodating scalable terrain properties. Moreover, the proposed traversability-aware Bayesian generalized kernel (T-BGK)-based inference method enhances terrain completion accuracy and efficiency. Lastly, leveraging the steppability-based Mahalanobis distance contributes to robustness against outliers and dynamic elements, ultimately yielding a static terrain traversability map. As verified in both public and our in-house datasets, our TRIP shows significant performance increases in terms of terrain reconstruction and navigation map. A demo video that demonstrates its feasibility as an integral component within an onboard online autonomous navigation system for quadruped robots is available at https://youtu.be/d7HlqAP4l0c.
Developing a Pragmatic Benchmark for Assessing Korean Legal Language Understanding in Large Language Models
Oct 11, 2024
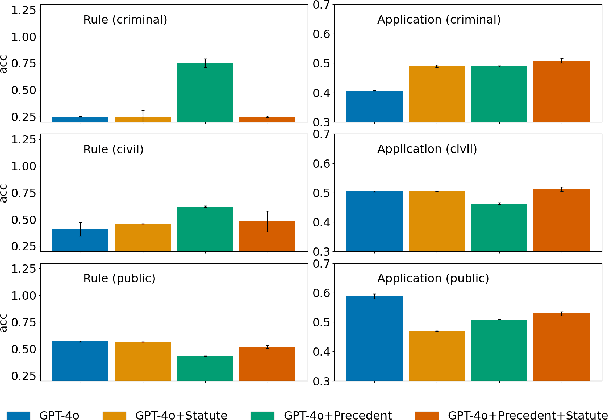
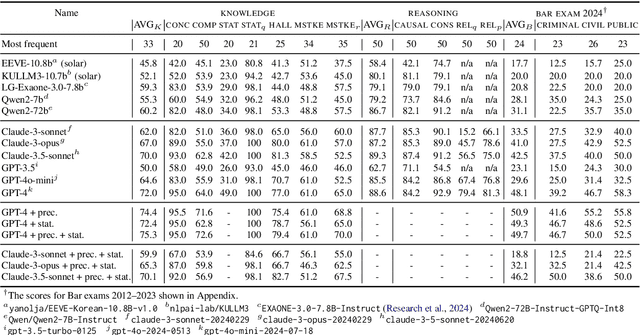
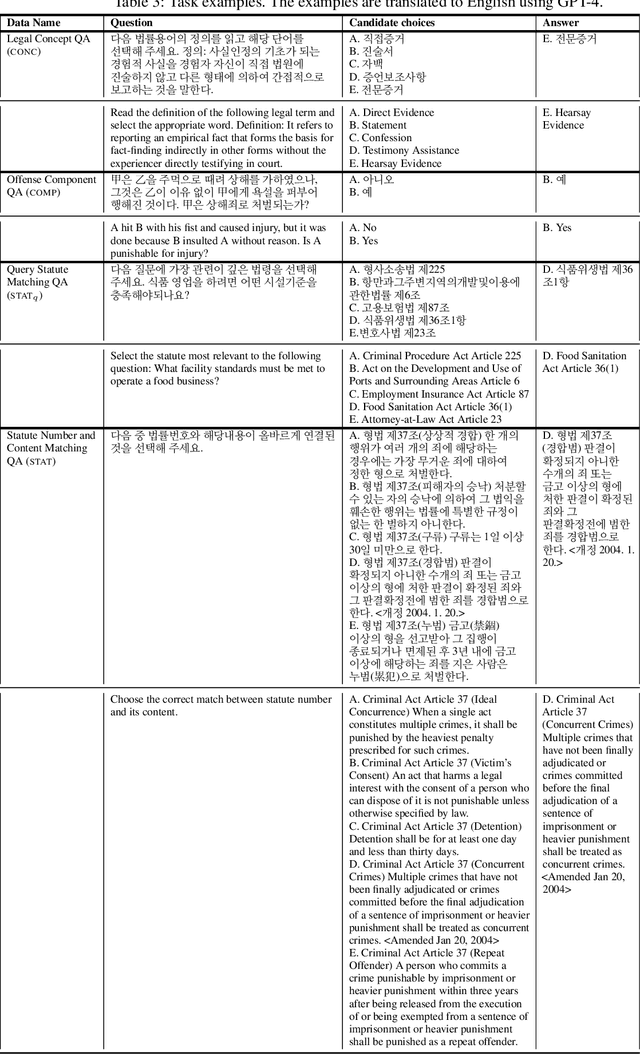
Large language models (LLMs) have demonstrated remarkable performance in the legal domain, with GPT-4 even passing the Uniform Bar Exam in the U.S. However their efficacy remains limited for non-standardized tasks and tasks in languages other than English. This underscores the need for careful evaluation of LLMs within each legal system before application. Here, we introduce KBL, a benchmark for assessing the Korean legal language understanding of LLMs, consisting of (1) 7 legal knowledge tasks (510 examples), (2) 4 legal reasoning tasks (288 examples), and (3) the Korean bar exam (4 domains, 53 tasks, 2,510 examples). First two datasets were developed in close collaboration with lawyers to evaluate LLMs in practical scenarios in a certified manner. Furthermore, considering legal practitioners' frequent use of extensive legal documents for research, we assess LLMs in both a closed book setting, where they rely solely on internal knowledge, and a retrieval-augmented generation (RAG) setting, using a corpus of Korean statutes and precedents. The results indicate substantial room and opportunities for improvement.
On the Consideration of AI Openness: Can Good Intent Be Abused?
Mar 11, 2024



Openness is critical for the advancement of science. In particular, recent rapid progress in AI has been made possible only by various open-source models, datasets, and libraries. However, this openness also means that technologies can be freely used for socially harmful purposes. Can open-source models or datasets be used for malicious purposes? If so, how easy is it to adapt technology for such goals? Here, we conduct a case study in the legal domain, a realm where individual decisions can have profound social consequences. To this end, we build EVE, a dataset consisting of 200 examples of questions and corresponding answers about criminal activities based on 200 Korean precedents. We found that a widely accepted open-source LLM, which initially refuses to answer unethical questions, can be easily tuned with EVE to provide unethical and informative answers about criminal activities. This implies that although open-source technologies contribute to scientific progress, some care must be taken to mitigate possible malicious use cases. Warning: This paper contains contents that some may find unethical.
eCDT: Event Clustering for Simultaneous Feature Detection and Tracking-
Jul 20, 2022
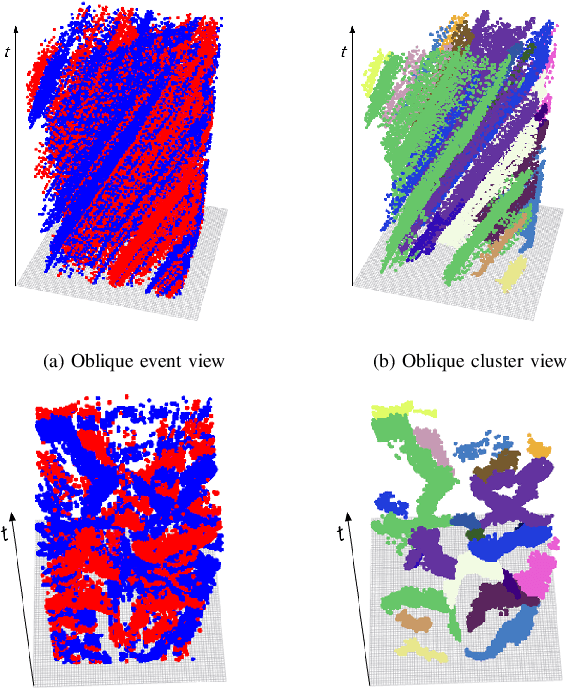
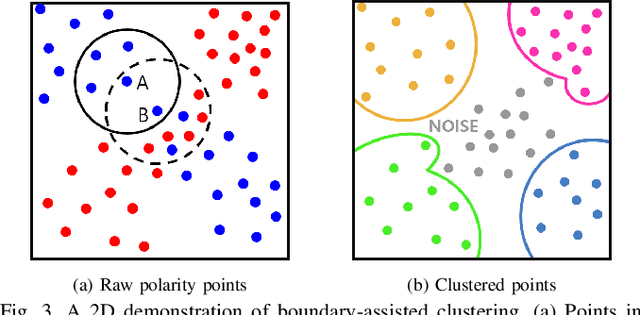
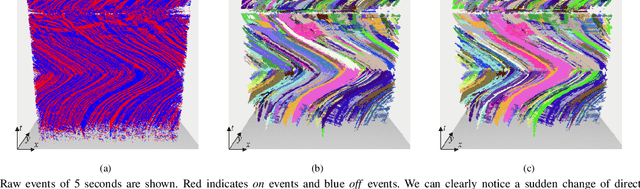
Contrary to other standard cameras, event cameras interpret the world in an entirely different manner; as a collection of asynchronous events. Despite event camera's unique data output, many event feature detection and tracking algorithms have shown significant progress by making detours to frame-based data representations. This paper questions the need to do so and proposes a novel event data-friendly method that achieve simultaneous feature detection and tracking, called event Clustering-based Detection and Tracking (eCDT). Our method employs a novel clustering method, named as k-NN Classifier-based Spatial Clustering and Applications with Noise (KCSCAN), to cluster adjacent polarity events to retrieve event trajectories.With the aid of a Head and Tail Descriptor Matching process, event clusters that reappear in a different polarity are continually tracked, elongating the feature tracks. Thanks to our clustering approach in spatio-temporal space, our method automatically solves feature detection and feature tracking simultaneously. Also, eCDT can extract feature tracks at any frequency with an adjustable time window, which does not corrupt the high temporal resolution of the original event data. Our method achieves 30% better feature tracking ages compared with the state-of-the-art approach while also having a low error approximately equal to it.
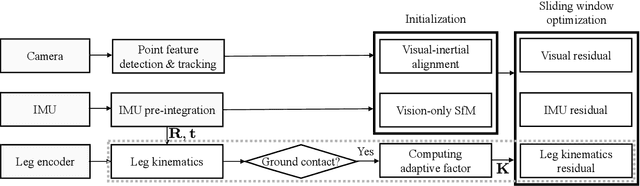
STEP: State Estimator for Legged Robots Using a Preintegrated foot Velocity Factor
Feb 11, 2022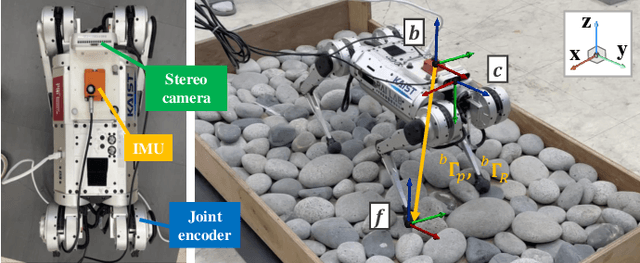
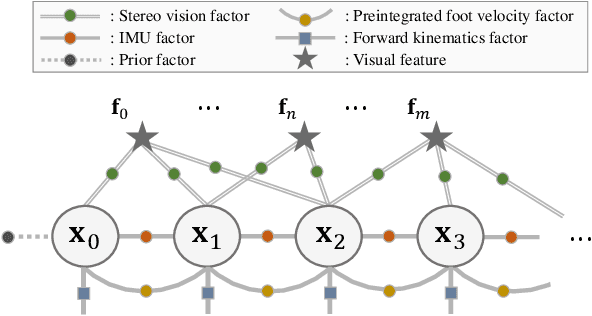
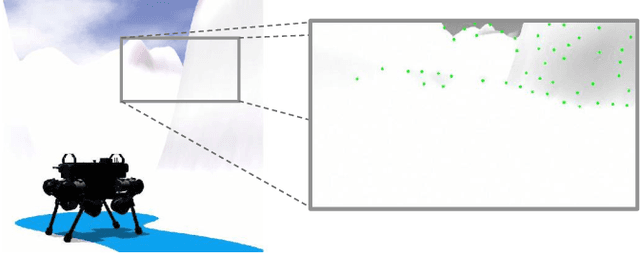
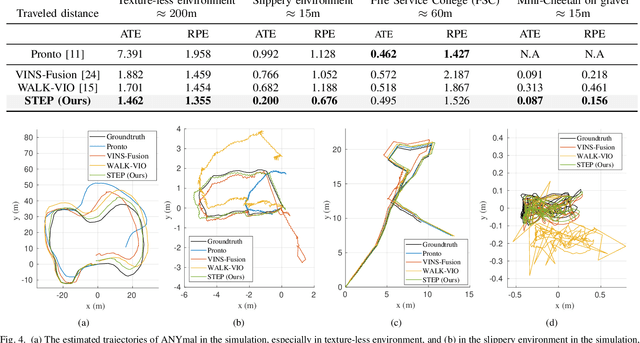
We propose a novel state estimator for legged robots, STEP, achieved through a novel preintegrated foot velocity factor. In the preintegrated foot velocity factor, the usual non-slip assumption is not adopted. Instead, the end effector velocity becomes observable by exploiting the body speed obtained from a stereo camera. In other words, the preintegrated end effector's pose can be estimated. Another advantage of our approach is that it eliminates the necessity for a contact detection step, unlike the typical approaches. The proposed method has also been validated in harsh-environment simulations and real-world experiments containing uneven or slippery terrains.
WALK-VIO: Walking-motion-Adaptive Leg Kinematic Constraint Visual-Inertial Odometry for Quadruped Robots
Nov 30, 2021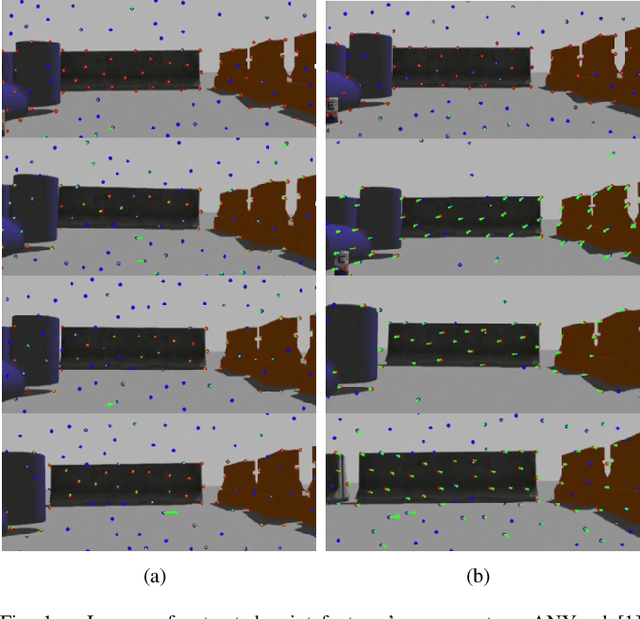

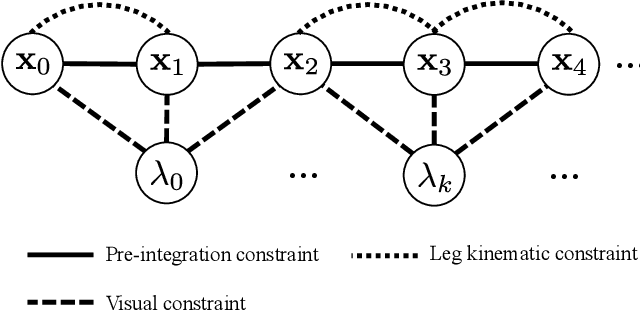
In this paper, WALK-VIO, a novel visual-inertial odometry (VIO) with walking-motion-adaptive leg kinematic constraints that change with body motion for localization of quadruped robots, is proposed. Quadruped robots primarily use VIO because they require fast localization for control and path planning. However, since quadruped robots are mainly used outdoors, extraneous features extracted from the sky or ground cause tracking failures. In addition, the quadruped robots' walking motion cause wobbling, which lowers the localization accuracy due to the camera and inertial measurement unit (IMU). To overcome these limitations, many researchers use VIO with leg kinematic constraints. However, since the quadruped robot's walking motion varies according to the controller, gait, quadruped robots' velocity, and so on, these factors should be considered in the process of adding leg kinematic constraints. We propose VIO that can be used regardless of walking motion by adjusting the leg kinematic constraint factor. In order to evaluate WALK-VIO, we create and publish datasets of quadruped robots that move with various types of walking motion in a simulation environment. In addition, we verified the validity of WALK-VIO through comparison with current state-of-the-art algorithms.
Avoiding Degeneracy for Monocular Visual SLAM with Point and Line Features
Mar 02, 2021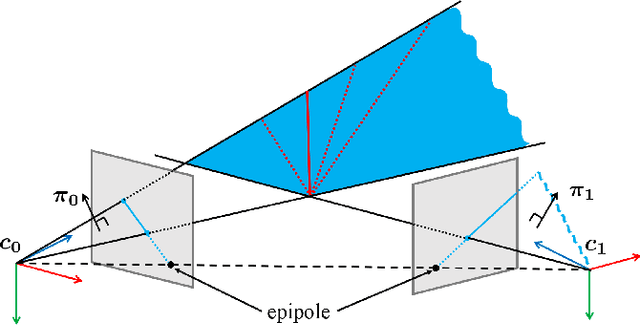
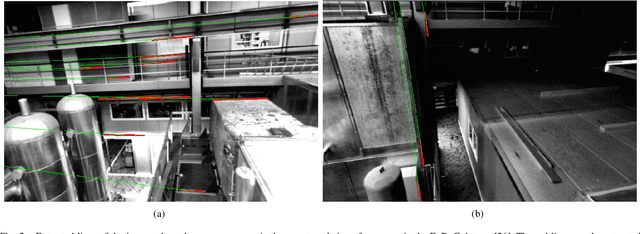
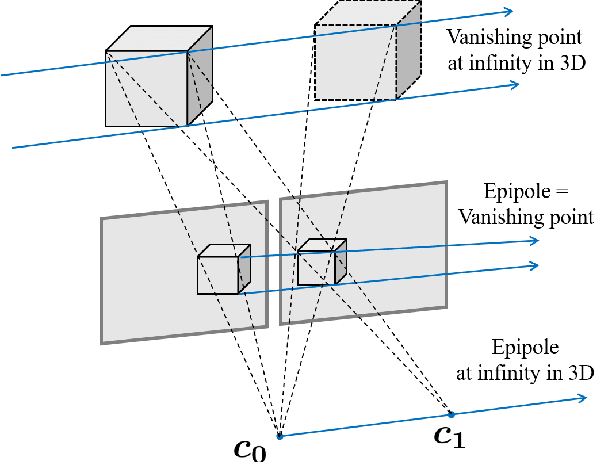
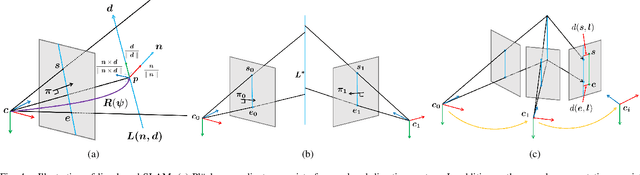
In this paper, a degeneracy avoidance method for a point and line based visual SLAM algorithm is proposed. Visual SLAM predominantly uses point features. However, point features lack robustness in low texture and illuminance variant environments. Therefore, line features are used to compensate the weaknesses of point features. In addition, point features are poor in representing discernable features for the naked eye, meaning mapped point features cannot be recognized. To overcome the limitations above, line features were actively employed in previous studies. However, since degeneracy arises in the process of using line features, this paper attempts to solve this problem. First, a simple method to identify degenerate lines is presented. In addition, a novel structural constraint is proposed to avoid the degeneracy problem. At last, a point and line based monocular SLAM system using a robust optical-flow based lien tracking method is implemented. The results are verified using experiments with the EuRoC dataset and compared with other state-of-the-art algorithms. It is proven that our method yields more accurate localization as well as mapping results.