 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLOi-Mapper: Consistent, Lightweight, Robust, and Incremental Mapper With Embedded Systems for Commercial Robot Services
Jun 28, 2024



In commercial autonomous service robots with several form factors, simultaneous localization and mapping (SLAM) is an essential technology for providing proper services such as cleaning and guidance. Such robots require SLAM algorithms suitable for specific applications and environments. Hence, several SLAM frameworks have been proposed to address various requirements in the past decade. However, we have encountered challenges in implementing recent innovative frameworks when handling service robots with low-end processors and insufficient sensor data, such as low-resolution 2D LiDAR sensors. Specifically, regarding commercial robots, consistent performance in different hardware configurations and environments is more crucial than the performance dedicated to specific sensors or environments. Therefore, we propose a) a multi-stage %hierarchical approach for global pose estimation in embedded systems; b) a graph generation method with zero constraints for synchronized sensors; and c) a robust and memory-efficient method for long-term pose-graph optimization. As verified in in-home and large-scale indoor environments, the proposed method yields consistent global pose estimation for services in commercial fields. Furthermore, the proposed method exhibits potential commercial viability considering the consistent performance verified via mass production and long-term (> 5 years) operation.
Struct-MDC: Mesh-Refined Unsupervised Depth Completion Leveraging Structural Regularities from Visual SLAM
Apr 29, 2022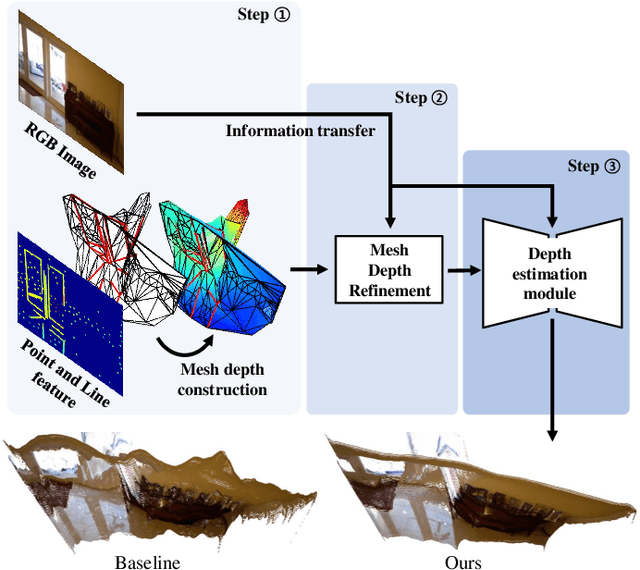
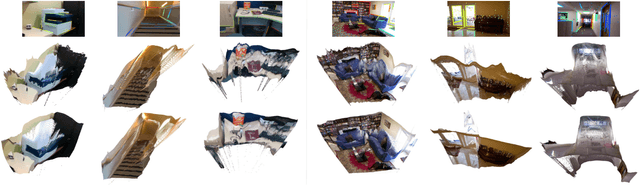
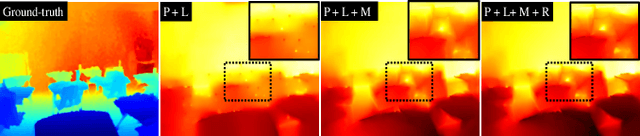
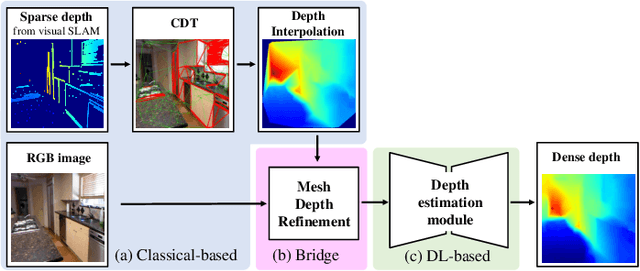
Feature-based visual simultaneous localization and mapping (SLAM) methods only estimate the depth of extracted features, generating a sparse depth map. To solve this sparsity problem, depth completion tasks that estimate a dense depth from a sparse depth have gained significant importance in robotic applications like exploration. Existing methodologies that use sparse depth from visual SLAM mainly employ point features. However, point features have limitations in preserving structural regularities owing to texture-less environments and sparsity problems. To deal with these issues, we perform depth completion with visual SLAM using line features, which can better contain structural regularities than point features. The proposed methodology creates a convex hull region by performing constrained Delaunay triangulation with depth interpolation using line features. However, the generated depth includes low-frequency information and is discontinuous at the convex hull boundary. Therefore, we propose a mesh depth refinement (MDR) module to address this problem. The MDR module effectively transfers the high-frequency details of an input image to the interpolated depth and plays a vital role in bridging the conventional and deep learning-based approaches. The Struct-MDC outperforms other state-of-the-art algorithms on public and our custom datasets, and even outperforms supervised methodologies for some metrics. In addition, the effectiveness of the proposed MDR module is verified by a rigorous ablation study.
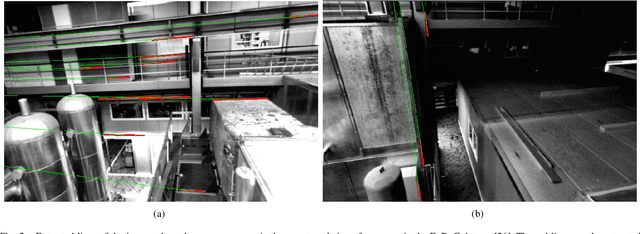
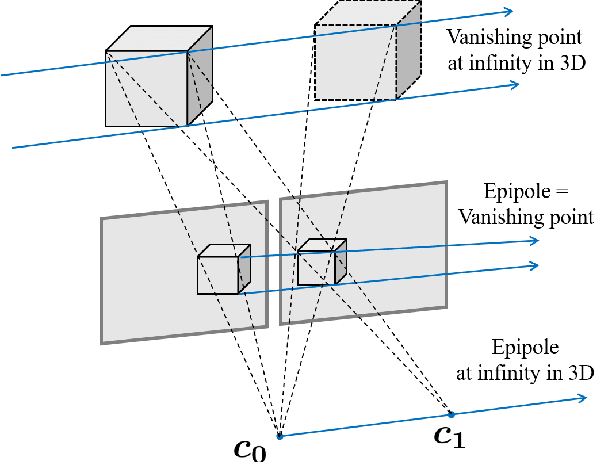
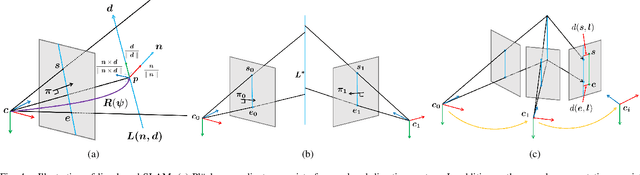
UV-SLAM: Unconstrained Line-based SLAM Using Vanishing Points for Structural Mapping
Dec 27, 2021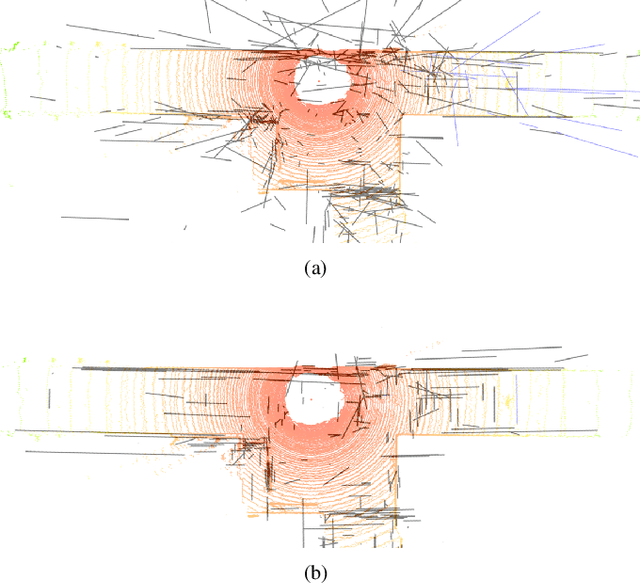
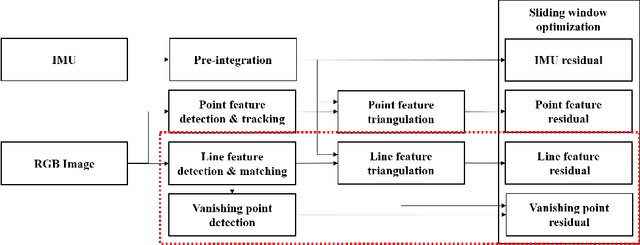
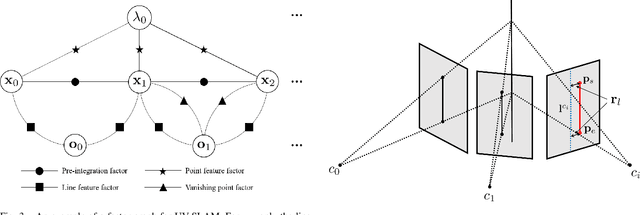
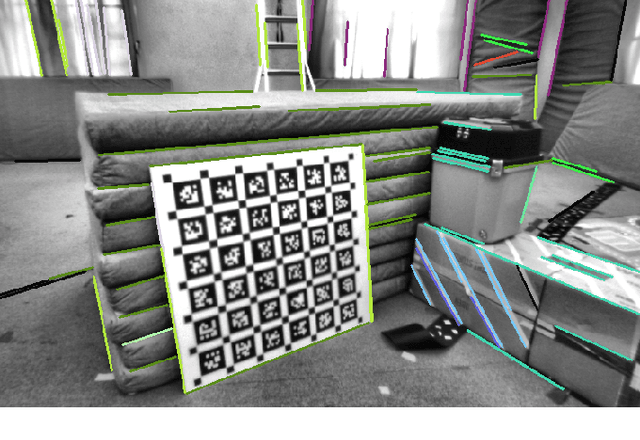
In feature-based simultaneous localization and mapping (SLAM), line features complement the sparsity of point features, making it possible to map the surrounding environment structure. Existing approaches utilizing line features have primarily employed a measurement model that uses line re-projection. However, the direction vectors used in the 3D line mapping process cannot be corrected because the line measurement model employs only the lines' normal vectors in the Pl\"{u}cker coordinate. As a result, problems like degeneracy that occur during the 3D line mapping process cannot be solved. To tackle the problem, this paper presents a UV-SLAM, which is an unconstrained line-based SLAM using vanishing points for structural mapping. This paper focuses on using structural regularities without any constraints, such as the Manhattan world assumption. For this, we use the vanishing points that can be obtained from the line features. The difference between the vanishing point observation calculated through line features in the image and the vanishing point estimation calculated through the direction vector is defined as a residual and added to the cost function of optimization-based SLAM. Furthermore, through Fisher information matrix rank analysis, we prove that vanishing point measurements guarantee a unique mapping solution. Finally, we demonstrate that the localization accuracy and mapping quality are improved compared to the state-of-the-art algorithms using public datasets.
WALK-VIO: Walking-motion-Adaptive Leg Kinematic Constraint Visual-Inertial Odometry for Quadruped Robots
Nov 30, 2021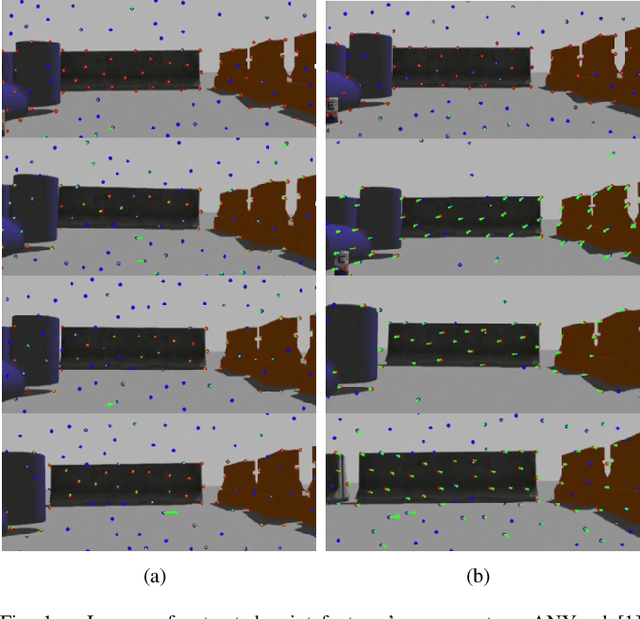
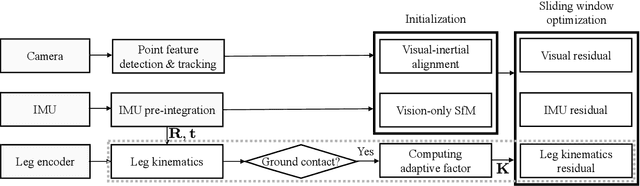

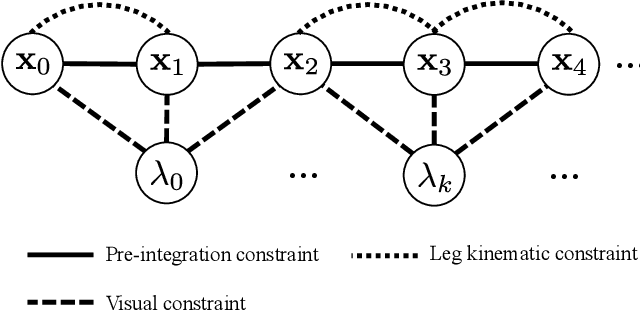
In this paper, WALK-VIO, a novel visual-inertial odometry (VIO) with walking-motion-adaptive leg kinematic constraints that change with body motion for localization of quadruped robots, is proposed. Quadruped robots primarily use VIO because they require fast localization for control and path planning. However, since quadruped robots are mainly used outdoors, extraneous features extracted from the sky or ground cause tracking failures. In addition, the quadruped robots' walking motion cause wobbling, which lowers the localization accuracy due to the camera and inertial measurement unit (IMU). To overcome these limitations, many researchers use VIO with leg kinematic constraints. However, since the quadruped robot's walking motion varies according to the controller, gait, quadruped robots' velocity, and so on, these factors should be considered in the process of adding leg kinematic constraints. We propose VIO that can be used regardless of walking motion by adjusting the leg kinematic constraint factor. In order to evaluate WALK-VIO, we create and publish datasets of quadruped robots that move with various types of walking motion in a simulation environment. In addition, we verified the validity of WALK-VIO through comparison with current state-of-the-art algorithms.
Avoiding Degeneracy for Monocular Visual SLAM with Point and Line Features
Mar 02, 2021
In this paper, a degeneracy avoidance method for a point and line based visual SLAM algorithm is proposed. Visual SLAM predominantly uses point features. However, point features lack robustness in low texture and illuminance variant environments. Therefore, line features are used to compensate the weaknesses of point features. In addition, point features are poor in representing discernable features for the naked eye, meaning mapped point features cannot be recognized. To overcome the limitations above, line features were actively employed in previous studies. However, since degeneracy arises in the process of using line features, this paper attempts to solve this problem. First, a simple method to identify degenerate lines is presented. In addition, a novel structural constraint is proposed to avoid the degeneracy problem. At last, a point and line based monocular SLAM system using a robust optical-flow based lien tracking method is implemented. The results are verified using experiments with the EuRoC dataset and compared with other state-of-the-art algorithms. It is proven that our method yields more accurate localization as well as mapping results.