 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeeCDT: Event Clustering for Simultaneous Feature Detection and Tracking-
Jul 20, 2022
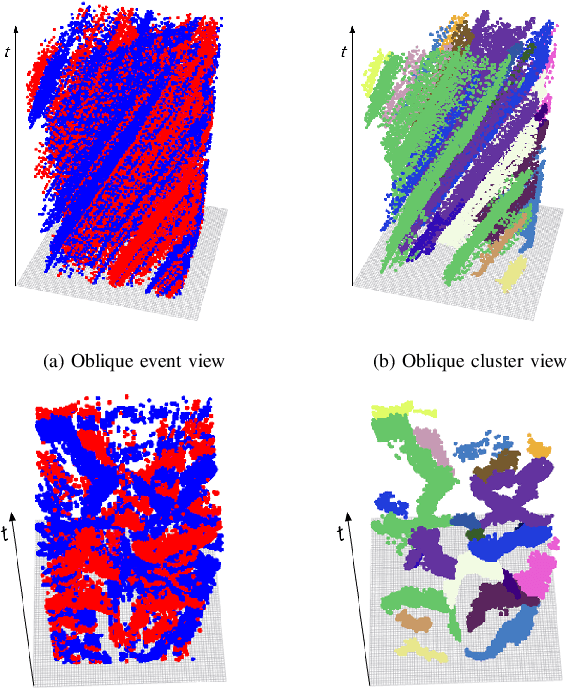
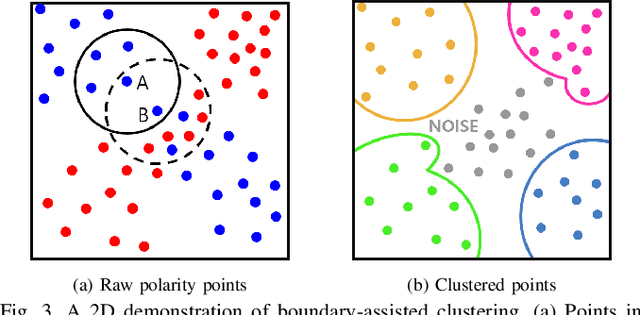
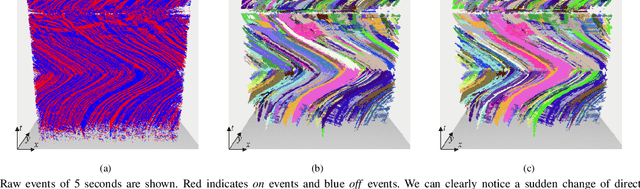
Contrary to other standard cameras, event cameras interpret the world in an entirely different manner; as a collection of asynchronous events. Despite event camera's unique data output, many event feature detection and tracking algorithms have shown significant progress by making detours to frame-based data representations. This paper questions the need to do so and proposes a novel event data-friendly method that achieve simultaneous feature detection and tracking, called event Clustering-based Detection and Tracking (eCDT). Our method employs a novel clustering method, named as k-NN Classifier-based Spatial Clustering and Applications with Noise (KCSCAN), to cluster adjacent polarity events to retrieve event trajectories.With the aid of a Head and Tail Descriptor Matching process, event clusters that reappear in a different polarity are continually tracked, elongating the feature tracks. Thanks to our clustering approach in spatio-temporal space, our method automatically solves feature detection and feature tracking simultaneously. Also, eCDT can extract feature tracks at any frequency with an adjustable time window, which does not corrupt the high temporal resolution of the original event data. Our method achieves 30% better feature tracking ages compared with the state-of-the-art approach while also having a low error approximately equal to it.
TRAVEL: Traversable Ground and Above-Ground Object Segmentation Using Graph Representation of 3D LiDAR Scans
Jun 07, 2022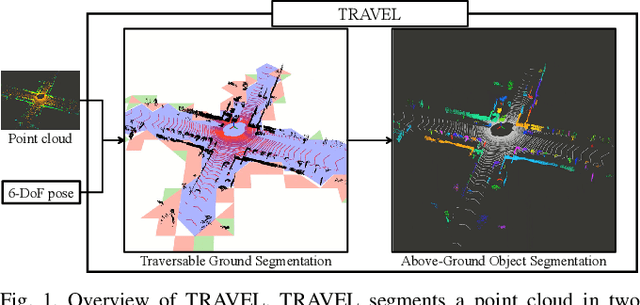
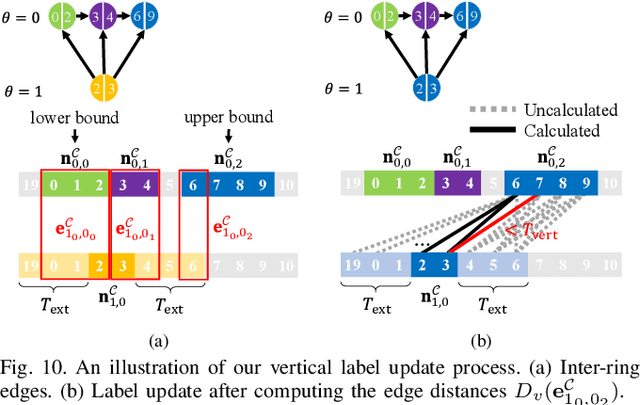
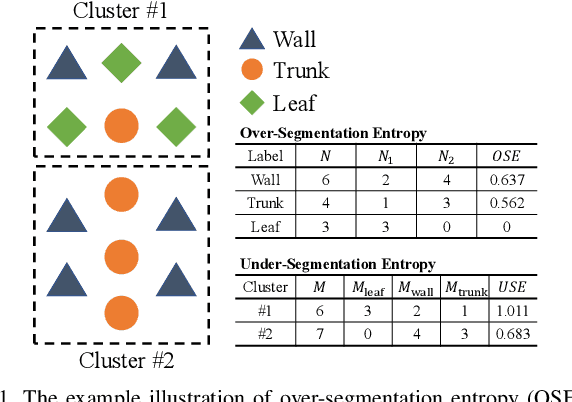
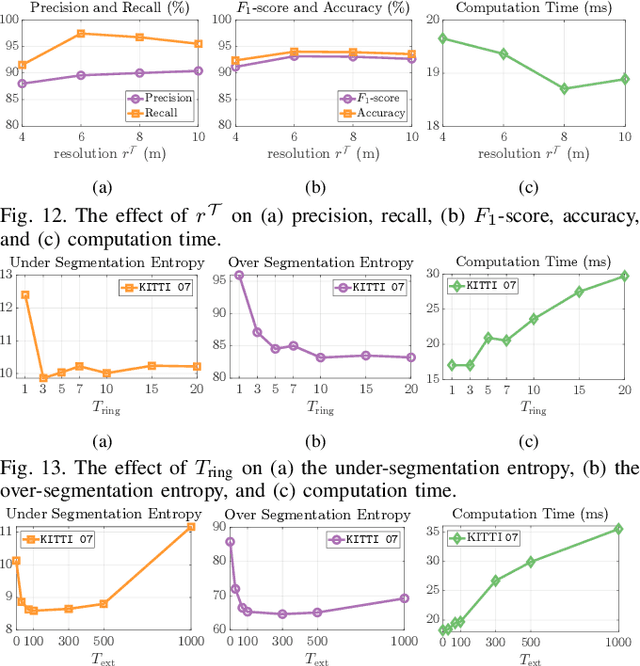
Perception of traversable regions and objects of interest from a 3D point cloud is one of the critical tasks in autonomous navigation. A ground vehicle needs to look for traversable terrains that are explorable by wheels. Then, to make safe navigation decisions, the segmentation of objects positioned on those terrains has to be followed up. However, over-segmentation and under-segmentation can negatively influence such navigation decisions. To that end, we propose TRAVEL, which performs traversable ground detection and object clustering simultaneously using the graph representation of a 3D point cloud. To segment the traversable ground, a point cloud is encoded into a graph structure, tri-grid field, which treats each tri-grid as a node. Then, the traversable regions are searched and redefined by examining local convexity and concavity of edges that connect nodes. On the other hand, our above-ground object segmentation employs a graph structure by representing a group of horizontally neighboring 3D points in a spherical-projection space as a node and vertical/horizontal relationship between nodes as an edge. Fully leveraging the node-edge structure, the above-ground segmentation ensures real-time operation and mitigates over-segmentation. Through experiments using simulations, urban scenes, and our own datasets, we have demonstrated that our proposed traversable ground segmentation algorithm outperforms other state-of-the-art methods in terms of the conventional metrics and that our newly proposed evaluation metrics are meaningful for assessing the above-ground segmentation. We will make the code and our own dataset available to public at https://github.com/url-kaist/TRAVEL.
Avoiding Degeneracy for Monocular Visual SLAM with Point and Line Features
Mar 02, 2021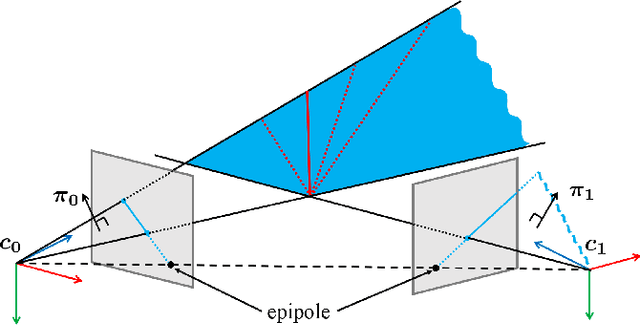
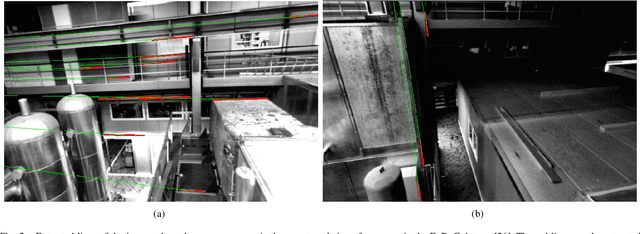
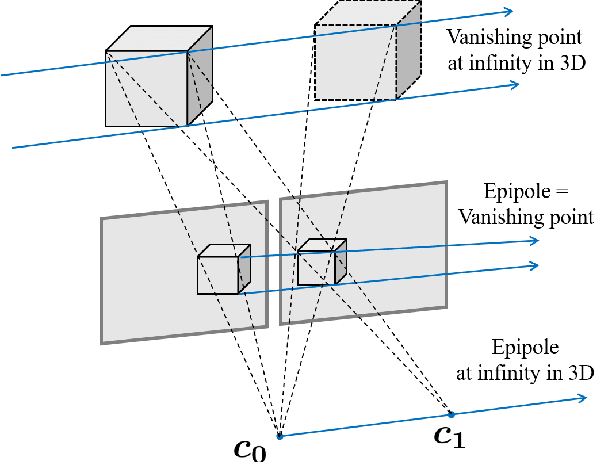
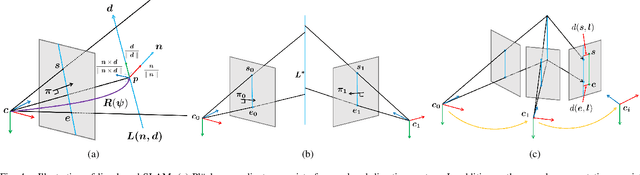
In this paper, a degeneracy avoidance method for a point and line based visual SLAM algorithm is proposed. Visual SLAM predominantly uses point features. However, point features lack robustness in low texture and illuminance variant environments. Therefore, line features are used to compensate the weaknesses of point features. In addition, point features are poor in representing discernable features for the naked eye, meaning mapped point features cannot be recognized. To overcome the limitations above, line features were actively employed in previous studies. However, since degeneracy arises in the process of using line features, this paper attempts to solve this problem. First, a simple method to identify degenerate lines is presented. In addition, a novel structural constraint is proposed to avoid the degeneracy problem. At last, a point and line based monocular SLAM system using a robust optical-flow based lien tracking method is implemented. The results are verified using experiments with the EuRoC dataset and compared with other state-of-the-art algorithms. It is proven that our method yields more accurate localization as well as mapping results.