 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStruct-MDC: Mesh-Refined Unsupervised Depth Completion Leveraging Structural Regularities from Visual SLAM
Paper and Code
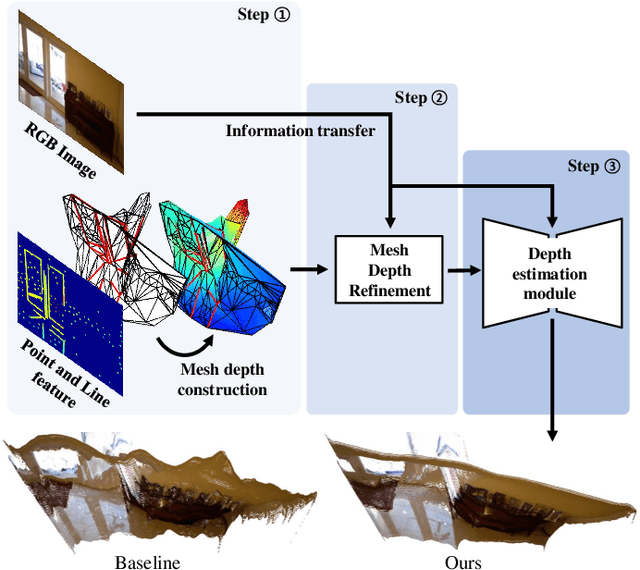
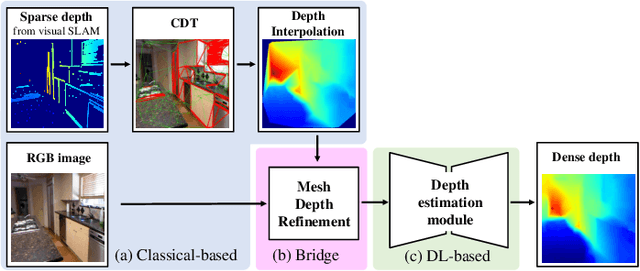
Feature-based visual simultaneous localization and mapping (SLAM) methods only estimate the depth of extracted features, generating a sparse depth map. To solve this sparsity problem, depth completion tasks that estimate a dense depth from a sparse depth have gained significant importance in robotic applications like exploration. Existing methodologies that use sparse depth from visual SLAM mainly employ point features. However, point features have limitations in preserving structural regularities owing to texture-less environments and sparsity problems. To deal with these issues, we perform depth completion with visual SLAM using line features, which can better contain structural regularities than point features. The proposed methodology creates a convex hull region by performing constrained Delaunay triangulation with depth interpolation using line features. However, the generated depth includes low-frequency information and is discontinuous at the convex hull boundary. Therefore, we propose a mesh depth refinement (MDR) module to address this problem. The MDR module effectively transfers the high-frequency details of an input image to the interpolated depth and plays a vital role in bridging the conventional and deep learning-based approaches. The Struct-MDC outperforms other state-of-the-art algorithms on public and our custom datasets, and even outperforms supervised methodologies for some metrics. In addition, the effectiveness of the proposed MDR module is verified by a rigorous ablation study.