 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLOi-Mapper: Consistent, Lightweight, Robust, and Incremental Mapper With Embedded Systems for Commercial Robot Services
Jun 28, 2024



In commercial autonomous service robots with several form factors, simultaneous localization and mapping (SLAM) is an essential technology for providing proper services such as cleaning and guidance. Such robots require SLAM algorithms suitable for specific applications and environments. Hence, several SLAM frameworks have been proposed to address various requirements in the past decade. However, we have encountered challenges in implementing recent innovative frameworks when handling service robots with low-end processors and insufficient sensor data, such as low-resolution 2D LiDAR sensors. Specifically, regarding commercial robots, consistent performance in different hardware configurations and environments is more crucial than the performance dedicated to specific sensors or environments. Therefore, we propose a) a multi-stage %hierarchical approach for global pose estimation in embedded systems; b) a graph generation method with zero constraints for synchronized sensors; and c) a robust and memory-efficient method for long-term pose-graph optimization. As verified in in-home and large-scale indoor environments, the proposed method yields consistent global pose estimation for services in commercial fields. Furthermore, the proposed method exhibits potential commercial viability considering the consistent performance verified via mass production and long-term (> 5 years) operation.
Enhanced Wi-Fi RTT Ranging: A Sensor-Aided Learning Approach
Dec 28, 2021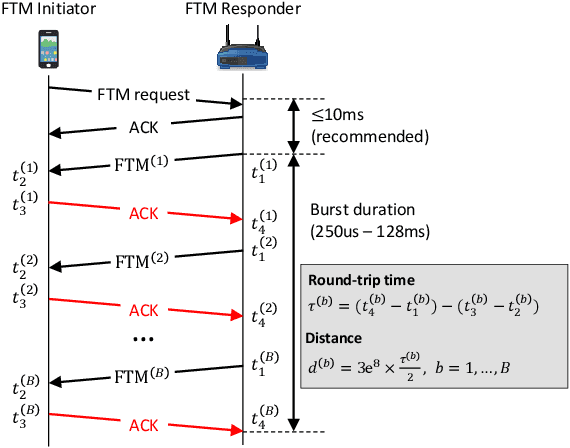

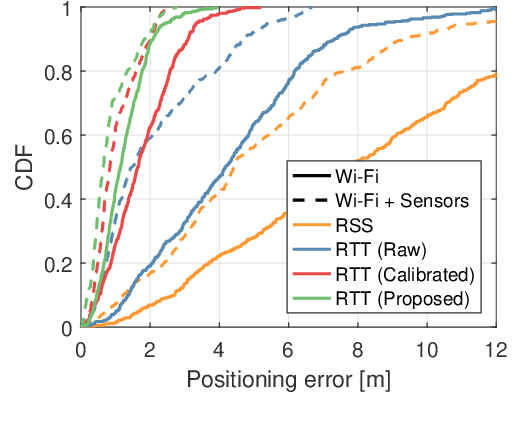
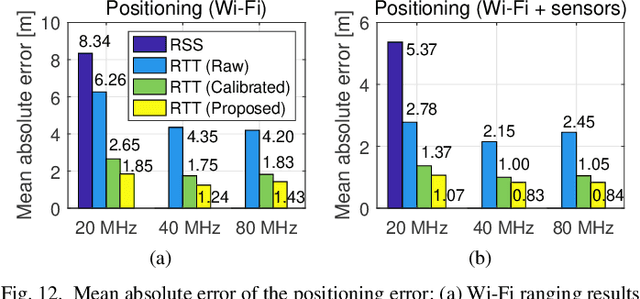
The fine timing measurement (FTM) protocol is designed to determine precise ranging between Wi-Fi devices using round-trip time (RTT) measurements. However, the multipath propagation of radio waves generates inaccurate timing information, degrading the ranging performance. In this study, we use a neural network (NN) to adaptively learn the unique measurement patterns observed at different indoor environments and produce enhanced ranging outputs from raw FTM measurements. Moreover, the NN is trained based on an unsupervised learning framework, using the naturally accumulated sensor data acquired from users accessing location services. Therefore, the effort involved in collecting training data is significantly minimized. The experimental results verified that the collection of unlabeled data for a short duration is sufficient to learn the pattern in raw FTM measurements and produce improved ranging results. The proposed method reduced the ranging errors in raw distance measurements and well-calibrated ranging results requiring the collection of ground truth data by 47-50% and 17-29%, respectively. Consequently, positioning error reduced by 17-30% compared to the result with well-calibrated ranging.