 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWALK-VIO: Walking-motion-Adaptive Leg Kinematic Constraint Visual-Inertial Odometry for Quadruped Robots
Paper and Code
Nov 30, 2021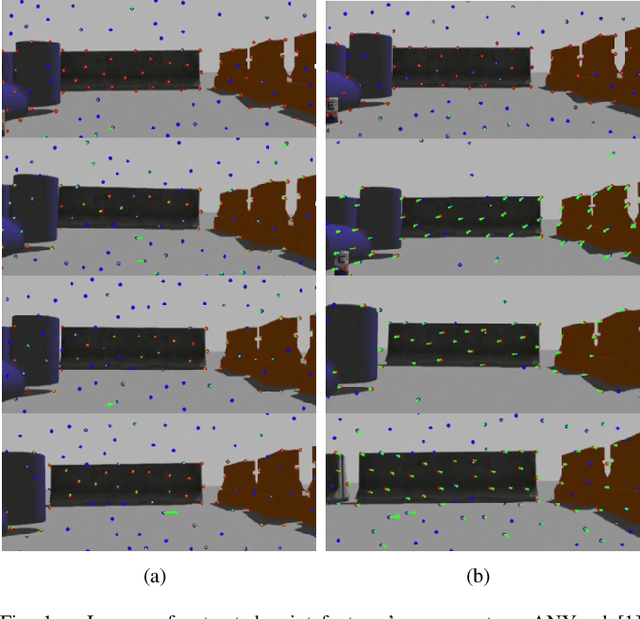
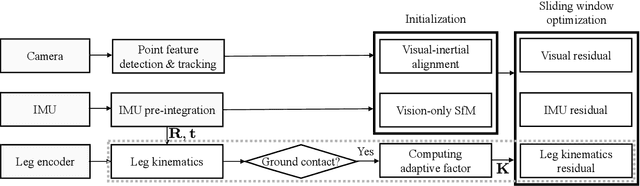

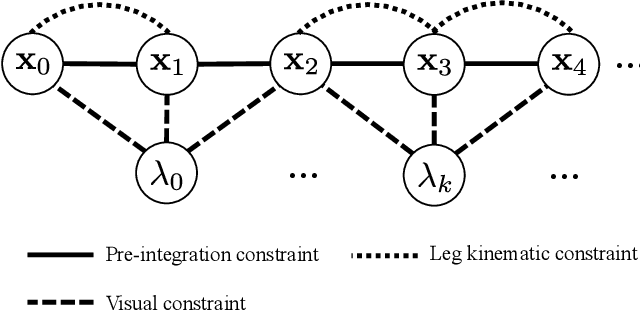
In this paper, WALK-VIO, a novel visual-inertial odometry (VIO) with walking-motion-adaptive leg kinematic constraints that change with body motion for localization of quadruped robots, is proposed. Quadruped robots primarily use VIO because they require fast localization for control and path planning. However, since quadruped robots are mainly used outdoors, extraneous features extracted from the sky or ground cause tracking failures. In addition, the quadruped robots' walking motion cause wobbling, which lowers the localization accuracy due to the camera and inertial measurement unit (IMU). To overcome these limitations, many researchers use VIO with leg kinematic constraints. However, since the quadruped robot's walking motion varies according to the controller, gait, quadruped robots' velocity, and so on, these factors should be considered in the process of adding leg kinematic constraints. We propose VIO that can be used regardless of walking motion by adjusting the leg kinematic constraint factor. In order to evaluate WALK-VIO, we create and publish datasets of quadruped robots that move with various types of walking motion in a simulation environment. In addition, we verified the validity of WALK-VIO through comparison with current state-of-the-art algorithms.